1.本发明涉及动作识别技术领域,具体涉及一种触地动作识别方法与计算机存储介质。
背景技术:
2.近年来,随着智能运动与体感游戏的兴起,通过人体的姿态动作数据进行运动分析与通过人体的姿态动作数据控制体感游戏中的角色的姿态变化或特效输出,越来越受到大众的关注。
3.目前,为完整的捕捉人体的各种姿态动作,通常通过摄像技术进行动作捕捉,以实时获取人体的各种姿态动作。但是,通过摄像技术进行动作捕捉只适用室内环境,且一般的用户并不具有布置多台摄像机进行动作捕捉的物质条件。因此,业内针对该问题开发了智能穿戴设备,以期解决对人体姿态动作捕捉的问题。
4.业内现通过为用户配置智能鞋,通过智能鞋内的惯性传感器检测腿部的动作。但是,由于人体运动过程中腿部可进行较为复杂的运动,例如慢走、慢跑快跑等动作,一般难以准确得检测各种运动状态下的腿部动作。
5.在慢走、慢跑、快跑等多种运动模式中,触地动作是最基础的动作,若是不能准确地检测触地动作,则识别慢走、慢跑、快跑等多种运动模式的识别则成为了空中楼阁。
6.但是,智能鞋的惯性传感器在慢走、慢跑、快跑等多种运动模式所获取的运动数据具有较大的差异,现有的智能鞋难以对各个运动模式的运动数据进行识别处理,从而导致对触动动作的识别产生错误。具体言之,现有的智能鞋只能对其中一种运动模式的运动数据进行准确识别处理,而不能对所有运动模式的运动数据进行准确识别处理,当用户切换到其他运动模式时,例如从慢走切换到快跑,则不能对快跑时的触地动作进行准确识别,容易识别错误,对计步、姿态捕捉与运动模式分析等的精准计算产生极大的影响。
技术实现要素:
7.本发明的首一目的在于提供一种准确识别触地动作的触地动作识别方法。
8.本发明的次一目的在于提供一种计算机存储介质。
9.为满足本发明的各个目的,本发明采用如下技术方案:
10.适应于本发明的首一目的而提供一种触地动作识别方法,包括如下步骤:
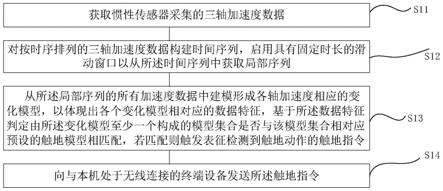
11.获取惯性传感器采集的三轴加速度数据;
12.对按时序排列的三轴加速度数据构建时间序列,启用具有固定时长的滑动窗口以从所述时间序列中获取局部序列;
13.从所述局部序列的所有加速度数据中建模形成各轴加速度相应的变化模型,以体现出各个变化模型相对应的数据特征,基于所述数据特征判定由所述变化模型至少一个构成的模型集合是否与该模型集合相对应预设的触地模型相匹配,若匹配则触发表征检测到触地动作的触地指令;
14.向与本机处于无线连接的终端设备发送所述触地指令。
15.进一步的,基于所述数据特征判定由所述变化模型至少一个构成的模型集合是否与该模型集合相对应预设的触地模型相匹配,若匹配则触发表征检测到触地动作的触地指令的步骤中,包括如下具体步骤:
16.确定预设的触地模型;
17.针对每个触地模型构造其相对应的模型集合;
18.针对每个模型集合,将其所体现的数据特征与其相对应的触地模型的参考特征相比较,确定彼此是否相匹配;
19.当任意一个所述的模型集合与其相对应预设的触地模型相匹配时,触发表征检测到触地动作的触地指令。
20.进一步的,从所述局部序列的所有加速度数据中建模形成各轴加速度相应的变化模型的步骤中,包括如下具体步骤:
21.对按时序排列的各轴加速度数据分别拟合,构建出各轴加速度相对应的变化模型;
22.对按时序排列的z轴加速度数据计算方差,构建出z轴方差相对应的变化模型。
23.进一步的,针对每个模型集合,将其所体现的数据特征与其相对应的触地模型的参考特征相比较,确定彼此是否相匹配的步骤中,包括如下具体步骤:
24.适应包含z轴加速度变化模型与z轴方差变化模型的第一模型集合,分别提取出同一时段内所述z轴加速度变化模型中表征波峰区的第一数据特征与z轴方差变化模型中表征波峰区的第二数据特征;
25.确定与该第一模型集合相对应预设的第一触地模型,确定其用于描述与z轴加速度变化模型相对应的波峰区的判决条件的第一参考特征,与用于描述与z轴方差变化模型相对应的波峰区的第二参考特征;
26.当所述第一数据特征与所述第一参考特征相匹配,且所述第二数据特征与所述第二参考特征相匹配时,则所述第一模型集合与所述第一触地模型相匹配。
27.具体的,当所述第一数据特征与所述第一参考特征相匹配,且所述第二数据特征与所述第二参考特征相匹配时,则所述第一模型集合与所述第一触地模型相匹配的步骤中,包括如下具体步骤:
28.确定所述第一参考特征中预设的第一z轴加速度阈值,与所述第二参考特征中预设的第一方差阈值;
29.当第一数据特征中的各个z轴加速度数据均小于所述第一z轴加速度阈值时,且第二数据特征中的各个方差值均大于所述第一方差阈值时,则所述第一模型集合与所述第一触地模型相匹配。
30.进一步的,针对每个模型集合,将其所体现的数据特征与其相对应的触地模型的参考特征相比较,确定彼此是否相匹配的步骤中,包括如下具体步骤:
31.适应包括z轴加速度变化模型的第二模型集合,按时序提取出相邻的所述z轴加速度变化模型中表征波谷区的第三数据特征与表征波峰区的第四数据特征;
32.确定与该第二模型集合相对应预设的第二触地模型,确定其用于描述与z轴加速度变化模型相对应的波谷区的判决条件的第三参考特征,与用于描述z轴加速度变化模型
相对应的波峰区的判决条件的第四参考特征;
33.当所述第三数据特征与所述第三参考特征相匹配,且所述第四数据特征与所述第四参考特征相匹配时,则所述第二模型集合与所述第二触地模型相匹配。
34.具体的,当所述第三数据特征与所述第三参考特征相匹配,且所述第四数据特征与所述第四参考特征相匹配时,则所述第二模型集合与所述第二触地模型相匹配的步骤中,包括如下具体步骤:
35.确定所述第三参考特征中预设的z轴加速度最小阈值,与第四参考特征中预设的z轴加速度最大阈值以及第二加速度阈值;
36.按时序判断所述第三数据特征中的z轴加速度最小值是否小于所述z轴加速度最小阈值,如小于则继续;
37.按时序判断所述第四数据特征中的z轴加速度最大值是否小于所述z轴加速度最大阈值,如小于则继续;
38.按时序判断所述第四数据特征中的各z轴加速度数据是否大于所述第二加速度阈值,如大于,则判定所述第二模型集合与所述第二触地模型相匹配。
39.进一步的,针对每个模型集合,将其所体现的数据特征与其相对应的触地模型的参考特征相比较,确定彼此是否相匹配的步骤中,包括如下具体步骤:
40.适应包含三轴加速度变化模型的第三模型集合,分别按时序提取出各轴加速度变化模型中相邻的表征波峰区的第五数据特征与表征平稳区的第六数据特征;
41.确定与该第三模型集合相对应预设的第三触地模型,确定其用于描述与各轴加速度变化模型相对应的波峰区的判决条件的第五参考特征,与用于描述与各轴加速度变化模型相对应的平稳区的第六参考特征;
42.当各轴加速度变化模型各自的第五数据特征均分别与所述第五参考特征相匹配,且各轴加速度变化模型各自的第六数据特征均分别与所述第六参考特征相匹配时,则所述第三模型集合与所述第三触地模型相匹配。
43.具体的,当各轴加速度变化模型的第五数据特征分别与所述第五数据特征相匹配,且各轴加速度变化模型的第六数据特征分别与所述第六数据特征相匹配时,则所述第三模型集合与所述第三触地模型相匹配的步骤中,包括如下具体步骤:
44.确定所述第五参考特征中预设的加速度最大阈值,与第六参考特征中预设的加速度区间;
45.当任意一轴加速度变化模型的第五数据特征中的加速度最大值大于所述加速度最大阈值,且该轴加速度变化模型的第六数据特征中的所有加速度数据均在所述加速度区间内时,则判定该轴加速度变化模型中存在l形信号序列;
46.当三轴加速度变化模型中均存在l形信号序列时,则判定所述第三模型集合与所述第三触地模型相匹配。
47.进一步的,在本方法持续循环执行过程中,对于已经基于第三模型集合实现匹配的情况,若本次循环中各轴加速度变化模型各自的表征平稳区的第六数据特征所具有的时长均占所在的滑动窗口的时长的三分之一至三分之二之间时,则直接判定第三模型集合与所述第三触地模型再次相匹配。
48.适应于本发明的次一目的而提供一种计算机可读存储介质,所述计算机可读存储
介质上存储有计算机程序,所述计算机程序被处理器执行时实现如首一目的中任意一项所述的触地动作识别方法的步骤。
49.相对于现有技术,本发明的优势如下:
50.首先,本发明的触地动作识别方法可基于惯性传感器获取三轴加速度数据判断用户在快跑、慢跑以及普通走路等多种状态下,是否实施了触地动作,从而触发相应的触地指令。该触地动作识别方法所需的代码量小,计算量小,运行效率高,计算精准,特别是适用于单片机之类的经济芯片开发的智能鞋。且,可有效地从三轴加速度数据中计算分析用户是否实施了触地动作。
51.其次,本发明的触地动作识别方法可准确的识别在不同运动模式下的触地动作,不仅仅只局限于在一种运动模式下精准识别触地,以使得本方法可应用于不同的运动模式中,提高本方法的应用范围。
52.本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
53.本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
54.图1为本发明的智能鞋的电路原理图。
55.图2为本发明的触地动作识别方法的第一模型集合下的z轴加速度变化模型与z轴方差变化模型的曲线图。
56.图3为本发明的触地动作识别方法的第二模型集合下的z轴加速度变化模型的曲线图。
57.图4为本发明的触地动作识别方法的第三模型集合下的三轴加速度变化模型的曲线图。
58.图5为本发明的触地动作识别方法的流程示意图。
59.图6为本发明的触地动作识别方法的步骤s13其中一个实施例的流程示意图。
60.图7为本发明的触地动作识别方法的步骤s13的另一个实施例的流程示意图。
61.图8为本发明的触地动作识别方法的步骤s135其中一个实施例的流程示意图。
62.图9为本发明的触地动作识别方法的步骤s1353的流程示意图。
63.图10为本发明的触地动作识别方法的步骤s135的另一个实施例的流程示意图。
64.图11为本发明的触地动作识别方法的步骤s1356的流程示意图。
65.图12为本发明的触地动作识别方法的步骤s135的又一个实施例的流程示意图。
66.图13为本发明的触地动作识别方法的步骤s1359的其中一个实施例的流程示意图。
67.图14为本发明的触地动作识别方法的步骤s1359另一个实施例的流程示意图。
68.图15为本发明的触地动作识别装置的结构示意图。
具体实施方式
69.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一
个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
70.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
71.本领域技术人员对此应当知晓:本发明的各种方法、装置,虽然基于相同的概念而进行描述而使其彼此间呈现共通性,但是,除非特别说明,否则这些方法、装置都是可以独立运行的。同理,对于本发明所揭示的各个实施例而言,均基于同一发明构思而提出,因此,对于相同表述的概念,以及尽管概念表述不同但仅是为了方便而适当变换的概念,应被等同理解。
72.本发明提供了一种触地动作识别方法,该方法用于识别用户的触地动作,生成用户的触地动作相关的计算机指令。用户可通过做出触地动作而实现与外部电子设备实时交互,参与各种电子数据活动。例如,通过智能鞋控制体感游戏时,外部电子设备通过智能鞋获取用户的触地动作,在此基础上进一步确定用户在于体感游戏交互过程中执行的动作,解析为动作指令,执行相应的反馈,确保用户与体感游戏之间实现人机交互操作。
73.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
74.在本发明的典型实施例中,适于所述触地动作识别方法而提供了一种智能鞋,结合图1,该智能鞋内设有惯性传感器60、控制单元70与通信单元80,该惯性传感器60用于检测xyz三轴加速度数据与xyz三轴陀螺仪数据,并将检测获取的三轴加速度数据与三轴陀螺仪数据发送至控制单元70。控制单元70基于获取的三轴加速度数据与三轴陀螺仪数据进行触地动作识别,获取触地指令,并将获取的触地指令经通信单元80无线发送至终端设备上。在一个实施例中,惯性传感器60将检测获取的三轴加速度数据与三轴陀螺仪数据依次经控制单元70与通信单元80无线发送至终端设备,终端设备基于获取的三轴加速度数据与三轴陀螺仪数据进行触地动作识别,获取触地指令。
75.本发明的触地动作识别方法基于惯性传感器获取的三轴加速度数据确定用户是否进行了触地动作。结合图5,所述触地动作识别方法包括如下步骤:
76.步骤s11,获取惯性传感器采集的三轴加速度:
77.当用户穿戴所述智能鞋进行运动时,设置于智能鞋内的惯性传感器将会持续检测获取x轴加速度数据、y轴加速度数据、z轴加速度数据以及三轴陀螺仪数据,惯性传感器将获取的三轴加速度数据以及三轴陀螺仪数据输出至智能鞋的控制单元。
78.步骤s12,对按时序排列的三轴加速度构建时间序列,启用具有固定时长的滑动窗口以从所述时间序列中获取局部序列:
79.控制单元将获取的三轴加速度数据按类别与时序进行排序,构建三轴加速度各自的序列,三轴加速度各自的序列共同组成所述时间序列。具体言之,控制单元将x轴加速度数据按时序依次排列以构建x轴加速度序列;控制单元将y轴加速度数据按时序依次排列以构建y轴加速度序列;控制单元将z轴加速度数据按时序依次排列以构建z轴加速度序列。x轴加速度序列、y轴加速度序列以及z轴加速度序列相互并列,以构建时间序列。
80.控制单元启用具有固定时长的滑动窗口以从时序序列中顺序三轴加速度序列相同时段内的各轴加速度数据共同构成时间序列的局部序列。具体言之,滑动窗口获取x轴加速度序列中固定时长内的所有x轴加速度数据,该些x轴加速度数据构成x轴加速度局部序列;滑动窗口获取与x轴加速度局部序列处于相同时段内的y轴加速度序列的所有y轴加速度数据,该些y轴加速度数据构成y轴加速度局部序列;滑动窗口获取与x轴加速度局部序列处于相同时段内z轴加速度序列的所有z轴加速度数据,该些z轴加速度数据构成z轴加速度局部序列。x轴加速度局部序列、y轴加速度局部序列以及z轴加速度局部序列共同构成局部序列。
81.步骤s13,从所述局部序列的所有加速度数据中建模形成各轴加速度相应的变化模型,以体现出各个变化模型相对应的数据特征,基于所述数据特征判定由所述变化模型至少一个构成的模型集合是否与该模型集合相对应预设的触地模型相匹配,若匹配则触发表征检测到触地动作的触地指令:
82.控制单元通过滑动窗口获取了时间序列的局部序列后,对局部序列内的各轴加速度数据进行建模以形成各轴加速度数据的变化模型,在滑动窗口的固定时长内,各轴加速度数据的变化模型可体现对应的各轴加速度的数据特征。具体言之,结合图6,通过局部序列内的各轴加速度数据构建各轴加速度的变化模型包括如下步骤:
83.s131,对按时序排列的各轴加速度数据分别拟合,构建出各轴加速度相对应的变化模型:
84.对局部序列中x轴加速度局部序列、y轴加速度局部序列以及z轴加速度局部序列分别拟合构成出对应的x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型。具体言之,将x轴加速度局部序列中的所有x轴加速度数据进行拟合构成x轴加速度变化模型;将y轴加速度局部序列中的所有y轴加速度数据进行拟合构成y轴加速度变化模型;将z轴加速度局部序列中的所有z轴加速度数据进行拟合构成y轴加速度变化模型。x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型均可以折线图或曲线图或函数图的形式展现,通过各轴加速度变化模型在图形上的变化可体现各轴加速度的数据特征。
85.s132,对按时序排列的z轴加速度数据计算方差,构建出z轴方差相对应的变化模型:
86.基于z轴加速度局部序列中的所有z轴加速度数据获取在滑动窗口的固定时长内的z轴加速度的方差数据。再基于所获取的所有的z轴加速度的方差数据构成z轴方差变化模型。所述z轴方差变化模型可以折线图或曲线图或函数图的形式展现,通过z轴方差变化模型在图形上的变化可体现出z轴方差的数据特征。
87.在本步骤s13中,在获取了各轴加速度的变化模型以及z轴方差变化模型后,将该
些变化模型构建与预设的各个触地模型相对应的模型集合,当构建的模型集合与对应的触地模型相匹配时,则表征检测到了触地动作,输出触地指令。具体言之,为构建模型集合和与触地模型相匹配,结合图7,步骤s13中包括如下具体步骤:
88.步骤s133,确定预设的触地模型:
89.在运动过程中,用户进行不同程度的运动将会产生不同的加速度的数据变化。具体言之,用户在进行普通走路、慢跑以及快跑的三种运动模式下,各轴加速度的数据变化会有对应的变化。
90.当用户处于快跑的运动模式时,主要是z轴加速度与z轴加速度方差产生了剧烈的变化,而x轴加速度与y轴加速度则无明显的变化。因此当用户处于快跑的运动模式时,主要检测z轴加速度与z加速度方差的变化。由此预设一个第一触地模型,该第一触地模型主要与z轴加速度变化模型和z轴方差变化模型相对应,而无需与x轴加速度变化模型和y轴加速度变化模型相对应。
91.当用户处于慢跑的运动模式时,主要是z轴加速度产生了剧烈的变化,而x轴加速度、y轴加速度以及z轴方差则无明显的变化。因此当用户处于慢跑的运动模式时,主要检测z加速度的变化,由此预设一个第二触地模型,该第二触地模型主要与z轴加速度变化模型相对应,而无需与x轴加速度变化模型、y轴加速度变化模型以及z轴方差变化模型相对应。
92.当用户处于普通走路的运动模式时,主要是x轴加速度、y轴加速度以及z轴加速度产生了剧烈的变化,而z轴方差则无明显的变化。因此当用于处于普通走路的运动模式时,主要检测x轴加速度、y轴加速度以及z轴加速度的变化,由此预设一个第三触地模型,该第三触地模型主要与x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型相对应,而无需与z轴方差变化模型相对应。
93.步骤s134,针对每个触地模型构成其对应的模型集合:
94.确定了预设的各触地模型后,为各个触地模型构建所对应的模型集合,以使得模型集合可与对应的触地模型相匹配,则表征触发了触地动作的触地指令。每个触地模型可包括至少一个上述的变化模型。
95.具体言之,第一触地模型主要与z轴加速度变化模型和z轴方差变化模型相对应,因此,基于z轴加速度变化模型与z轴方差变化模型共同构建与第一触地模型相对应的第一模型集合。当第一模型集合与第一触地模型相匹配时,则输出表征触地动作的触地指令。
96.第二触地模型主要与z轴加速度变化模型相对应,因此,基于z轴加速度变化模型构建与第二触地模型相对应的第二模型集合。当第二模型集合与第二触地模型相匹配时,则输出表征触地动作的触地指令。
97.第三触地模型主要与x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型相对应,因此,基于x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型共同构建与第三触地模型相对应的第三模型集合。当第三模型集合与第三触地模型相匹配时,则输出表征触地动作的触地指令。
98.当任意一个模型集合与对应的触地模型相匹配后,则表征滑动窗口内输出了表征触地动作的触地指令,其他各模型集合可停止与对应的触地模型相匹配。或者,当任意一个模型集合与对应的触地模型相匹配后,则表征滑动窗口内输出表征可能检测到触地动作的指令,并通过其他两个模型集合进行辅助判断是否检测到触地动作,当检测到触地动作后,
输出触地指令。
99.步骤s135,针对每个模型集合,将其所体现的数据特征与其相对应的触地模型的参考特征相比较,确定彼此是否匹配:
100.为使得模型集合与对应的触地模型相匹配,将模型集合内的变化模型所体现的数据特征与相对应触地模型所预设的参考特征相比较,当模型集合内的所有数据特征与触地模型内所对应的参考特征均相匹配时,则模型集合与对应的触地模型相匹配,输出触地指令。在本发明的三个模型集合各对应一个触地模型,为具体叙述各模型集合与对应的触地模型的匹配过程,在下文中一一叙述。
101.首先,对快跑状态下,第一触地模型与第一触地模型的匹配过程进行叙述,结合图8,具体包括如下步骤:
102.步骤s1351,适应包括z轴加速度变化模型与z轴方差变化模型的第一模型集合,分别提取出同一时段内所述z轴加速度变化模型中表征波峰区的第一数据特征与z轴方差变化模型中表征波峰区的第二数据特征:
103.结合图2,在相同时段内,从第一模型集合的z轴加速度变化模型与z轴方差变化模型中提取出相对应的数据特征。具体言之,从z轴加速度变化模型中提取出其内表征波峰区的第一数据特征;从z轴方差变化模型中提取出其内表征波峰区的第二数据特征;第一数据特征与第二数据特征在同一时段内。结合图2,在z轴加速度变化模型和z轴方差变化模型共同拟合形成的曲线图中,第一数据特征在该曲线图中的z轴加速度变化模型所对应的曲线中表现为波峰区,第二数据特征在该曲线图中的z轴方差变化模型所对应的曲线中表现为波峰区,且第一数据特征在曲线图中所表征的波峰区与第二数据特征在曲线图中所表征的波峰区在同一时段内。
104.步骤s1352,确定与该第一模型集合相对应预设的第一触地模型,确定其用于描述与z轴加速度变化模型相对应的波峰区的判决条件的第一参考特征,与用于描述与z轴方差变化模型相对应的波峰区的第二参考特征:
105.第一触地模型预设有第一参考特征与第二参考特征。所述第一参考特征用于判断z轴加速度变化模型的表征波峰区的第一数据特征是否符合预设的判决条件。所述第二参考特征用于判断z轴方差变化模型的表征波峰区的第一模型集合的第二数据特征是否符合预设的条件。
106.步骤s1353,当所述第一数据特征与所述第一参考特征相匹配,且所述第二数据特征与所述第二参考特征相匹配时,则所述第二模型集合与所述第一触地模型相匹配:
107.当z轴加速度变化模型的表征波峰区的第一数据特征与第一触地模型的第一参考特征相匹配,且z轴方差变化模型的表征波峰区的第二数据特征与第一触地模型的第二参考特征相匹配时,则表征第一模型集合与所述第一触地模型相匹配,输出表征检测到触地动作的触地指令。具体言之,结合图9,第一数据特征与第一参考特征的匹配,第二数据特征与第二参考特征的匹配包括如下具体步骤:
108.步骤s13531,确定所述第一参考特征中预设的第一z轴加速度阈值,与所述第二参考特征中预设的第一方差阈值:
109.第一触地模型的第一参考特征中预设有第一z轴加速度阈值,该第一z轴加速度阈值用于判定在表征波峰区的第一数据特征内的所有z轴加速度数据未超出预设的范围。
110.第一触地模型的第二参考特征中预设有第一方差阈值,该第一方差阈值用于判定在表征波峰区的第二数据特征内的所有z轴方差数据均在预设范围之外,从而体现在剧烈跑步时,z轴加速度的强烈的波动性。
111.步骤s13532,当第一数据特征中的各个z轴加速度数据均小于所述第一z轴加速度阈值时,且第二数据特征中的各个方差值均大于所述第一方差阈值时,则所述第一模型集合与所述第一触地模型相匹配:
112.所述第一触地模型的第一参考特征中预设有第一z轴加速度阈值,当表征波峰区的第一数据特征内的所有z轴加速度数据均小于所述第一z轴加速度阈值时,第一数据特征与第一参考特征相匹配。
113.所述第一触地模型的第二参考特征预设有第一方差阈值,当表征波峰区的第二数据特征内的所有z轴加速度方差数据均大于所述第一方差阈值时,则第二数据特征与所述第二参考特征。
114.相应的,判断第一数据特征中的各个z轴加速度数据均小于所述第一z轴加速度阈值时,且第二数据特征中的各个z轴加速度方差值均大于所述第一方差阈值的判断方法可参考如下代码
115.if(var(acc_z_window)>var_thresh and acc_z<acc_thresh)
116.on_floor=1
117.else
118.on_floor=0
119.该段代码中的var(acc_z_window)表示z轴加速度方差数据,var_thresh表示第一z轴加速度方差阈值,acc_z表示z轴加速度数据,acc_thresh表示第一z轴加速度阈值,on_floor=1表示触地,on_floor=0表示未触地。由此,该段代码所表示的含义与本步骤s13532的内容相对应。
120.由此,第一模型集合与第一触地模型的匹配完成了,通过第一模型集合与第一触地模型相匹配,可判断用户是否在快跑状态下完成了触地动作。
121.其次,对慢跑状态下,第二模型集合与第二触地模型的匹配过程进行叙述,结合图10,具体包括如下步骤:
122.步骤s1354,适应包含z轴加速度变化模型的第二模型集合,按时序提取出相邻的所述z轴加速度变化模型中表征波谷区的第三数据特征与表征波峰区的第四数据特征:
123.结合图3,第二模型集合中主要涉及z轴加速度变化模型,可通过从滑动窗口内z轴加速度变化模型中提取出对应的数据特征以此来判断第二模型集合是否与第二触地模型相匹配。具体言之,从z轴加速度变化模型中按照时间顺序依次出表征波谷区的第三数据特征与表征波峰区的第四数据特征。结合图3,在z轴加速度变化模型所拟合的曲线图中,第三数据特征在曲线图中表现为波谷区,第四数据特征在曲线图中表现为波峰区,第三数据特征在曲线图中所表现的波谷区与第四数据特在曲线图中所表现的波峰区相邻。
124.步骤s1355,确定与该第二模型合集相对应预设的第二触地模型,确定其用于描述与z轴加速度变化模型相对应的波谷区的判决条件的第三参考特征,与用于描述z轴加速度变化模型相对应的波峰区的判决条件的第四参考特征:
125.第二触地模型预设有第三参考特征与第四参考特征。所述第三参考特征用于判断
z轴加速度变化模型的表征波谷区的第三数据特征是否符合预设的判决条件;所述第四参考特征用于判断z加速度变化模型的表征波峰区的第四数据特征是否符合预设的判决条件。
126.步骤s1356,当所述第三数据特征与所述第三参考特征相匹配,且所述第四数据特征与所述第四参考特征相匹配时,则所述第二模型集合与所述第二触地模型相匹配:
127.当z轴加速度变化模型的表征波谷区的第三数据特征与第二触地模型的第三参考特征相匹配,且z轴加速度变化模型的表征波峰区的第四数据特征与第二触地模型的第四参考特征相匹配时,则输出表征检测到触地动作的触地指令。具体言之,结合图11,第三数据特征与第三参考特征的匹配,第四数据特征与第四参考特征的匹配包括如下具体步骤:
128.步骤s13561,确定所述第三参考特征中预设的z轴加速度最小阈值,与第四参考特征中预设的z轴加速度最大阈值以及第二加速度阈值:
129.第二触地模型的第三参考特征中预设有z轴加速度最小阈值,该z轴加速度最小阈值用于判定第三数据特征内的所有z轴加速度数据均在第三参考特征所限定的波谷区内,第三数据特征内的所有z轴加速度数据均小于所述z轴加速度最小阈值。
130.第二触地模型的第四参考特征中预设的由z轴加速度最大阈值与第二加速度阈值。该z轴加速度最大阈值用于判定在表征波峰区的第四数据特征内的所有z轴加速度数据未超出预设的范围;第二加速度阈值用于判定第四数据特征所有z轴加速度数据均大于该第二加速度阈值,第四数据特征中存在波峰区。
131.步骤s13562,按时序判断所述第三数据特征中的z轴加速度数据最小值是否小于z轴加速度最小阈值,如小于则继续:
132.所述第二触地模型的第三参考特征中预设有z轴加速度最小阈值,当表征波谷区的第三数据特征中的z轴加速度最小值小于所述z轴加速度阈值时,则表征第三数据特征与第三参考特征相匹配,之后在进行下一步骤;反之,停止对第二模型集合与第二触地模型的匹配。
133.步骤s13563,按时序判断所述第四数据特征的z轴加速度最大值是否小于z轴加速度最大阈值,如小于则继续:
134.所述第二触地模型的第四参考特征中预设有z轴加速度最大阈值,当表征波峰区的第四数据特征中的z轴加速度最大值小于z轴加速度最大阈值时,这可进行下一步骤;反之,停止对第二模型集合与第二触地模型的匹配。
135.进一步言之,步骤s13562与步骤s13563该两步骤共同作用用于检测在慢跑时z轴加速度变化模型是否剧烈的抖动,若是剧烈的抖动,则可进行下一步的触地动作的判断,若无剧烈的抖动,则停止对第二模型集合与第二触地模型的配合。
136.具体的步骤s13562与步骤s13563的实施,可参考如下代码:
137.138.该段代码中的max_val表示z轴加速度最大值,max_index为max_val的下标,max(acc_z_window)表示z轴加速度变化模型中的最大值,min_val表示z轴加速度最小值,min_index为min_val的下标,dis
‑
thresh为预设的差值阈值,min_thresh为z轴加速度最小阈值,max_thresh为z轴加速度最大阈值,count_down表征倒计时。
139.具体言之,该段代码表示当z轴加速度最大值的下标大于z轴加速度最小值的下标时,且z轴加速度最大值大于z轴加速度最小值与差值阈值,且z轴加速度最小值小于z轴加速度最小阈值,且z轴加速度最大值小于z轴加速度最大阈值时,进入倒计时后,可进行下一步骤s13564。
140.步骤s13564,按时序判断所述第四数据特征中的各z轴加速度数据是否大于第二加速度阈值,如大于,则判定所述第二模型集合与所述第二触地模型相匹配:
141.当第二模型集合的第四数据特征中的所有z轴加速度数据均大于所述第二加速度阈值后,则表征第二模型集合与第二触地模型相匹配。
142.反映在代码上则为:
[0143][0144]
该段代码中,acc_z表示z轴加速度变化模型中的所有z轴加速度数据,acc_thresh为第二加速度阈值。
[0145]
则通过该段代码可知,当通过步骤s13562与步骤s13563设置了一个倒计时后,若倒计时大于零,且所有z轴加速度数据均大于所述第二加速度阈值后,则on_floor=1以表征输出表征触地动作的触地指令;反之,若on_floor=0表征未检测到触地动作,停止对第二模型集合与第二触地模型的匹配。
[0146]
由此,第二模型集合与第二触地模型的匹配完成了,通过第二模型集合与第二触地模型相匹配,可判断用户是否在慢跑状态下完成了触地动作。
[0147]
再次,对普通走路状态下,第三模型集合与第三触地模型的匹配过程进行叙述,结合图12,具体包括如下步骤:
[0148]
步骤s1357,适应包括三轴加速度变化模型的第三模型集合,分别按时序提取出各轴加速度变化模型中相邻的表征波峰区的第五数据特征与表征平稳区的第六数据特征:
[0149]
结合图4,第三模型集合中主要涉及x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型,可通过从滑动窗口内x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型中提取出对应的数据特征以此来判断第三模型集合是否与第三模型集合相匹配。
[0150]
具体言之,从x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型中各自分别提取出表征波峰区第五数据特征与表征平稳区的第六数据特征。也即是说,从按时间顺序从x轴加速度变化模型中依次提取出x轴第五数据特征与x轴第六数据特征;从按时间顺序从y轴加速度变化模型中依次提取出y轴第五数据特征与y轴第六数据特征;从按时间顺序从z轴加速度变化模型中依次提取出z轴第五数据特征与z轴第六数据特征。
[0151]
结合图4,在x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型共同拟合形成的曲线图中;
[0152]
x轴第五数据特征在该曲线图中的x轴加速度变化模型所对应的曲线中表现为波峰区,x轴第六数据特征在该曲线图中的x轴加速度变化模型所对应的曲线中表现为平稳区,x轴第五数据特征与x轴第六数据特征在曲线图中的x轴加速度变化模型中共同组成一个l形信号序列。
[0153]
y轴第五数据特征在该曲线图中的y轴加速度变化模型所对应的曲线中表现为波峰区,y轴第六数据特征在该曲线图中的y轴加速度变化模型所对应的曲线中表现为平稳区,y轴第五数据特征与y轴第六数据特征在曲线图中的y轴加速度变化模型中共同组成一个l形信号序列。
[0154]
z轴第五数据特征在该曲线图中的z轴加速度变化模型所对应的曲线中表现为波峰区,z轴第六数据特征在该曲线图中的z轴加速度变化模型所对应的曲线中表现为平稳区,z轴第五数据特征与z轴第六数据特征在曲线图中的z轴加速度变化模型中共同组成一个l形信号序列。
[0155]
步骤s1358,确定与该第三模型集合相对应预设的第三触地模型,确定其用于描述与各轴加速度变化模型相对应的波峰区的判决条件的第五参考特征,与用于描述与各轴加速度变化模型相对应的平稳区的第六参考特征:
[0156]
第三触地模型预设有第五参考特征与第六参考特征。所述第五参考特征用于判断三轴加速度变化模型各自的表征波峰区的第五数据特征是否符合预设的判决条件。所述第六参考特征用于判断三轴加速度变化模型各自的表征平稳区的第六数据特征是否符合预设的判决条件。
[0157]
步骤s1359,当各轴加速度变化模型各自的第五数据特征均分别与所述第五参考特征相匹配,且各轴加速度变化模型各的第六数据特征均分别与所述第六参考特征相匹配时,则所述第三模型集合与所述第三触地模型相匹配:
[0158]
当x轴加速度变化模型的表征波峰区的第五数据特征与第五参考特征相匹配,且x轴加速度变化模型的表征平稳区的第六数据特征与第六参考特征相匹配时,则表示x轴加速度变化模型存在l形信号序列。
[0159]
当y轴加速度变化模型的表征波峰区的第五数据特征与第五参考特征相匹配,且y轴加速度变化模型的表征平稳区的第六数据特征与第六参考特征相匹配时,则表示y轴加速度变化模型在l形信号序列。
[0160]
当z轴加速度变化模型的表征波峰区的第五数据特征与第五参考特征相匹配,且z轴加速度变化模型的表征平稳区的第六数据特征与第六参考特征相匹配时,则表示z轴加速度变化模型在l形信号序列。
[0161]
当x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型中均存在l形序列信号后,则第三模型集合与第三触地模型相匹配,输出表征检测到触地动作的触地指令。具体言之,结合图13,三轴加速度变化模型各自的第五数据特征分别与第五参考特征相匹配,三轴加速度变化模型各自的第六数据特征分别与第六参考特征相匹配包括如下具体步骤:
[0162]
步骤s13591,确定所述第五参考特征中预设的加速度最大阈值,与第六参考特征
预设的加速度区间:
[0163]
第三触地模型的第五参考特征中预设有加速度最大阈值,该加速度最大值用于判定在表征波峰区的各轴的第五数据特征内的所有加速度数据均在预设范围之外,从而体现出波峰区的数据特征。
[0164]
第三触地模型的第六参考特征中预设有加速度区间,该加速度区间用于判定在表征平稳区的各轴的第六数据特征内的所有加速度数据均在预设的范围之内,从而体现处平稳区的数据特征。
[0165]
步骤s13592,当任意一轴加速度变化模型的第五数据特征中的加速度最大值大于所述加速度最大阈值,且该轴加速度变化模型的第六数据特征中的所有加速度数据均在所述加速度区间内时,则判定该轴加速度变化模型中存在l形信号序列:
[0166]
以x轴加速度变化模型中x轴第五数据特征与第五参考特征相匹配,且x轴第六数据特征与第六参考特征相匹配为例,叙述本步骤s13592。
[0167]
第三触地模型的第五参考特征预设有加速度最大阈值,当表征波峰区的x轴第五数据特征中的加速度最大值大于所述加速度最大阈值时,x轴第五数据特征与第五参考特征相匹配;若x轴第五数据特征与第五参考特征不相匹配,则停止本步骤s13592。
[0168]
第三触地模型的第六参考特征设有加速度区间,当表征平稳区的x轴第六数据特征中的所有加速度数据均在所述加速度区间内时,则x轴第六数据特征与第六参考特征相匹配。
[0169]
由此,当x轴第五数据特征与第五参考特征相匹配,且x轴第六数据特征与第六参考特征相匹配,则表征x轴加速度变化模型中存在l形信号序列。相应的,x轴加速度变化模型中存在l形信号序列的判断方法可参考如下代码:
[0170]
该段代码中的max_index为加速度最大值的下标,window_size表征滑动窗口的长度(即滑动窗口的固定时长),distance为预设距离;acc_window(max_index)为加速度最大值,acc_window(max_index 2)为加速度最大值之后的第二个加速度数据,diff_max_thresh为预设的最大差值阈值;acc_window(end)表征滑动窗口内的最后一个加速度数据,left_min_val表征滑动窗口在加速度最大值之后的各加速度数据之中的最小加速度数据,diff_min_thresh为预设的最小差值阈值,status=1表征存在l形信号序列。
[0171]
该段代码表征,当加速度最大值的下标max_index小于滑动窗口window_size与预
设距离distance之差,且加速度最大值acc_window(max_index)与加速度最大值之后的第二个加速度数据acc_window(max_index 2)之差大于预设最大差值阈值diff_max_thresh,以及滑动窗口内的最后一个加速度数据acc_window(end)与滑动窗口在加速度最大值之后的各加速度数据之中的最小加速度数据left_min_val之差小于最小差值阈值diff_min_thresh时,则可判断相对应的加速变化模型中status=1,存在l形序列信号。
[0172]
若上段代码不能确定对应的加速度变化模型中存在l形序列信号,则可参考如下代码:
[0173][0174]
该段代码表征,当l形信号序列下降过程中加速度最大值与加速度最小值之差right_diff_sum_val大于l形序列信号平缓过程中left_diff_sum_val的n倍,且加速度最大值max_val大于滑动窗口内的最后一个加速度数据acc_window(end)和加速度阈值acc_thresh1之差,且加速度最大值的下标max_index小于滑动窗口的长度window_size与预设距离distance之差,以及right_diff_val大于差值阈值时,则可判断相对应的加速变化模型中status=1,存在l形序列信号。
[0175]
由此,可通过本步骤s13592判断x轴加速度变化模型中是否存在l形序列信号;而y轴加速度变化模型与z轴加速度变化模型中是否分别存在l形序列信号,可执行本步骤s13592,在此为节省篇幅不在赘述。
[0176]
在部分实施例中,在步骤s13592的两段代码可能存在误识别的情况,在此需要通过设置加速度阈值以及角速度阈值进行过滤,以提高l形序列信号的判断的准确性。具体可参考如下代码:
[0177][0178]
该段代码中,当z轴加速度数据acc_z小于加速度最小阈值acc_min_thresh,且设置的抖动倒计时shake_countdown为0时,或者,z轴加速度数据acc_z小于预设的加速度可能值impossible_acc_val时,或者,陀螺仪的三轴角速度数据的平方和gyr_norm大于预设的最大的角速度阈值gyr_max_thresh时,则status=0,对应的加速度变化模型中不存在l形序列信号。
[0179]
进一步的shake_countdown的触发基于以下代码:
[0180][0181]
该段代码中,加速度最大值的下标max_index等于滑动窗口的长度window_size,且加速度最大值max_val与加速度最小值min_val之差大于预设的差值阈值dis_threshold时,则重设shake_countdown。
[0182]
步骤s13593,当三轴加速度变化模型中均存在l形信号序列时,则判定所述第三模型集合与所述第三触地模型相匹配:
[0183]
当第三模型集合的x轴加速度变化模型、y轴加速度变化模型以及z轴加速度变化模型中均存在l形信号序列时,则可判定第三模型集合与所述第三触地模型相匹配,输出表征检测到触地动作的触地指令。
[0184]
在本步骤s13593中可包括进一步的步骤,以判断三轴加速度变化模型中是否均存在l形信号序列,用户是否触地。具体言之,可通过以下代码判断用户是否触地。
[0185][0186]
该段代码表示,若上一时刻x轴加速变化模型的状态status=1,当前的x轴加速度变化模型的状态status=0,判断用户未进行触地动作on_floor=0,或者,若上一时刻y轴加速变化模型的状态status=1,当前的y轴加速度变化模型的状态status=0,判断用户未进行触地动作on_floor=0。
[0187][0188]
该段代码表示,若上一时刻x轴加速变化模型的状态status=0,当前的x轴加速度变化模型的状status=1,判断用户进行了触地动作on_floor=1,或者,若上一时刻y轴加速变化模型的状态status=0,当前的y轴加速度变化模型的状态status=1,判断用户进行了触地动作on_floor=1。
[0189]
[0190]
该段代码表示,若上一时刻x轴加速变化模型的状态status=1,当前的x轴加速度变化模型的状态status=1,判断用户进行了触地动作on_floor=1,或者,若上一时刻y轴加速变化模型的状态status=1,当前的y轴加速度变化模型的状态status=1,判断用户进行了触地动作on_floor=1。
[0191]
结合图14,步骤s13594,在本方法持续循环执行过程中,对已经基于第三模型集合实现匹配的情况,若本次循环中各轴加速度辩护模型各自的表征平稳区的第六数据所具有的时长占所在滑动窗口的三分之一至三分之二之间时,则直接判定第三模型集合与所述第三触地模型再次相匹配:
[0192]
当第三模型集合与第三触地模型相匹配时,各轴加速度变化模型的表征平稳区的第六数据特征占对应的滑动窗口的长度的三分之一至三分之二的长度。因此,当检测到任意一个加速度变化模型中的表征平稳区的第六数据特征占对应的滑动窗口的长度的三分之一至三分之二的长度,则可直接判断该加速度变化模型中status=1,存在l形信号序列。具体可参见如下代码:
[0193][0194]
该段代码表示,当上一滑动窗口中,加速度变化模型中status=1,也即是说存在l形序列信号;在当前的滑动窗口中,该加速度最大值max_val与加速度最小值min_val小于预设值threshold时,则该加速度变化模型中status=1,也即是说存在l形序列信号。
[0195]
且三轴加速度变化模型的数据均从同一惯性传感器中获得,该三个加速度变化模型相互联系,当其中一个加速变化模型发生变化时,也可通过另外两个加速度变化模型来维持。
[0196][0197]
该段代码表示,status的取值为0时表征未检测到l形信号序列,status的取值为1时表征检测到l形信号序列,status的取值为2时表征可能检测到l形信号序列。通过该段代码可进一步的判断各轴加速度变化模型中是否存在l形信号序列。
[0198]
步骤136,当任意一个所述的模型集合与其相对应预设的触地模型相匹配时,触发表征检测到触地动作的触地指令:
[0199]
在本方法中,第一模型集合与第一触地模型相对应,以检测快跑状态下的触地动作;第二模型集合与第二触地模型相对应,以检测慢跑状态下的触地动作;第三模型集合与第三触地模型相对应,以检测普通走路状态下的触地动作。三个触地模型中,任意一个输出表征检测到触地动作的触地指令后,则停止另外两个触地模型的运算。
[0200]
步骤14,向与本机处于无线连接的终端设备发送所述触地指令:
[0201]
当控制单元获取了所述触地指令后,经所述通信单元向终端设备发送所述触地指令,以使得控制单元基于所述触地指令与终端设备实现交互。
[0202]
进一步的,实施了本发明的方法的智能鞋用于与智能电视、移动终端、游戏机等终端设备进行交互时,可以作为用户指令的输入设备使用。这种情况下,智能鞋的控制单元通过通信单元建立与所述终端设备之间的通信连接,实时将其进行触地动作识别之后获得的触地指令输出给所述的终端设备。这些终端设备开启相关游戏程序或者健康数据app时,触地指令也可被视为相关的用户指令或者用户数据,相应的,终端设备的程序进程响应于所述的触地指令,也可向智能鞋反馈信息或发送通知,例如发送一个控制智能鞋的震动传感器震动告警的通知指令,诸如此类,在智能鞋基于距离数据能够更为精准地提供用户触地指令的基础上,必然也能改进在这些应用场景中的人机交互体验。
[0203]
在一个应用本发明的游戏场景中,当确定用户的姿态朝向后,智能鞋可通过通信单元将用户的触地指令输出至智能电视、移动终端、游戏机等终端设备,该些终端设备接收
到用户的触地指令后,基于该数据可生成计算机控制指令,以用于引导用户与终端设备进行人机交互控制,提高游戏的趣味性。
[0204]
在进一步的实施例中,当控制单元获取触地指令后,将该触地指令添加至预设的计步模型中,以实现精准计步。
[0205]
本发明还提供了一种触地动作识别装置,该触地动作识别装置用于检测用户是否进行了触地动作。结合图15,所述触地动作识别装置包括如下模块:
[0206]
采集单元10,获取惯性传感器采集的三轴加速度数据;
[0207]
拟合模块20,对按时序排列的三轴加速度数据构建时间序列,启用具有固定时长的滑动窗口以从所述时间序列中获取局部序列;
[0208]
判断单元30,从所述局部序列的所有加速度数据中建模形成各轴加速度相应的变化模型,以体现出各个变化模型相对应的数据特征,基于所述数据特征判定由所述变化模型至少一个构成的模型集合是否与该模型集合相对应预设的触地模型相匹配,若匹配则触发表征检测到触地动作的触地指令;
[0209]
交互单元40,向与本机处于无线连接的终端设备发送所述触地指令。
[0210]
本发明还提供了一种适应于上述的触地动作识别方法的终端设备,该终端设备与上文所述的智能鞋无线连接。该终端设备中运行的至少一个进程响应所述的触地指令而触发另一计算机事件,基于所述触地指令而控制应用程序中的角色做出相应的姿态调整。
[0211]
本发明还提供了一种计算机设备,该计算机设备与如上述内容所描述的智能鞋无线连接,该计算机设备中运行的至少一个进程响应所述的事件通知而触发另一计算机事件以改变自身正在执行的业务流程。
[0212]
本技术还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述内容所描述的触地动作识别方法的步骤。该存储介质可以包括:u盘、移动硬盘、只读存储器(read
‑
only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
[0213]
综上所述,本发明的触地动作识别方法通过获取的三轴加速度数据而分别构建加速度变化模型,该些加速度变化模型分别与不同的触地模型相匹配,以使得本方法可精确地识别在快跑或慢跑或普通走路状态下的触地动作。本方法步骤简单,可精准的识别触地动作。
[0214]
因为情况复杂,无法一一列举进行阐述,本领域技术人员应能意识到根据本技术提供的基本方法原理结合实际情况可以存在很多的例子,在不付出足够的创造性劳动下,应均在本技术的保护范围内。
[0215]
说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0216]
专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业
技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。
[0217]
本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
[0218]
还需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。