技术特征:
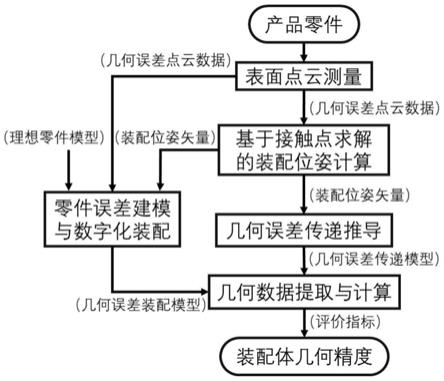
1.一种基于误差建模的机械产品几何精度虚拟检测方法,其特征在于,包括如下步骤:步骤一,分析机械产品结构,选择对几何精度指标有影响的零件和关键表面,对关键表面进行误差测量,得到点云数据。步骤二,分别对每一对接触面的点云数据进行装配位姿计算,求解得到接触点坐标,获得装配位姿矢量。步骤三,在需要建立机械产品的三维几何误差装配体模型的情况下,进行零件误差建模与数字化装配,依次建立几何误差曲面模型,三维几何误差零件模型和三维几何误差装配模型;在不需要建立机械产品的三维几何误差装配体模型的情况下,进行几何误差传递推导,建立几何误差传递模型。步骤四,在建立三维几何误差装配模型的基础上,对该表面进行离散采样,获取装配后该表面的点云数据,进行几何精度虚拟检测;在建立几何误差传递模型的基础上,将装配位姿矢量与点云数据带入几何误差传递模型中,计算得到装配后几何表面的点云数据,进行几何精度虚拟检测。2.如权利要求1所述的机械产品几何精度虚拟检测方法,其特征在于,所述步骤二中基于接触点求解的装配位姿计算,得到每对接触面的接触点坐标和表征装配位姿空间变动的装配位姿矢量。3.如权利要求1所述的机械产品几何精度虚拟检测方法,其特征在于,所述步骤三中在需要建立机械产品的三维几何误差装配体模型的情况下,根据装配位姿矢量将零件的误差模型进行数字化装配,建立三维几何误差装配体模型。4.如权利要求1所述的机械产品几何精度虚拟检测方法,其特征在于,所述步骤三中在不需要建立机械产品的三维几何误差装配体模型的情况下,以机械产品装配关系和装配位姿矢量为基础,使用空间变换矩阵表征装配关系和装配位姿空间变动,推导并建立几何误差传递的计算模型。5.如权利要求1所述的机械产品几何精度虚拟检测方法,其特征在于,所述步骤四中仅对零件实际测量,不需要实际装配,在计算机上对测量数据进行计算和建模,实现装配体任一表面的虚拟检测,获得产品装配后的几何精度的精确预测值。
技术总结
本发明公开了一种基于几何误差的机械产品几何精度虚拟检测方法,属于精密机械系统检测领域。本方法的步骤包括测量表面点云,基于接触点求解进行装配位姿计算,建立机械产品的三维几何误差装配体模型和几何误差传递数学模型,提取几何数据并进行几何精度虚拟检测。本发明能够在实际测量零件的几何误差的基础上,进一步在计算机上进行虚拟检测,最终得到机械产品装配体的包含几何误差建模表面在内的任一表面的空间位置和几何形状数据。本发明为解决机械产品部分几何特征难测量和无法直接测量的问题提供一种有效方法。接测量的问题提供一种有效方法。接测量的问题提供一种有效方法。
技术研发人员:金鑫 尚可 张之敬 陈骁 萨仁其木格 金豪
受保护的技术使用者:北京理工大学
技术研发日:2021.09.08
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。