1.本发明涉及到光栅计量技术领域,特别涉及一种减小光栅尺的阿贝误差的方法。
背景技术:
2.光栅尺是以光栅莫尔条纹为技术基础的线位移测量装置,按照工作原理和测量方法主要分为两大类:增量式光栅尺和绝对式光栅尺。其凭借测量精度高、响应灵敏、测量范围广、使用简单等诸多优点,被广泛应用于微电子、超精密加工、微纳加工等众多行业的精密仪器设备中,并用于位置检测装置反馈位移量,实现系统的闭环控制。
3.当使用检测系统检测光栅尺测量精度时,光栅尺在测量范围内的误差来源主要由光栅尺本身制造误差、阿贝误差、余弦误差、检测装置的误差组成。
4.其中现有技术中阿贝误差的解释如下:图1所示为阿贝误差示意图,假设光栅尺轨迹和理想导轨轨迹这两条轴线的阿贝臂为d,如果在运动过程中实际导轨轨迹产生θ的角度变化量,则导致阿贝误差δ可用表达式如下:
5.δ=d x tanθ
ꢀꢀꢀ
(1)
6.假设d=1000mm,θ=0.01
°
,由上式可知,在该情况下产生的测量误差为174um,误差在精密测量的情况下对测量结果影响很大,是不可忽略的。因此,应该尽可能的缩短阿贝臂并提高运动导轨的直线度,以降低阿贝误差的影响。光栅尺在使用过程中,需要安装在数控机床、位置测量装置、机械运动平台等结构上组成测量系统,而这些平台由于导轨加工精度、光栅尺安装等原因使其存在一定的阿贝误差,使光栅尺所在的测量轴线和运动轴线不重合。
技术实现要素:
7.本发明为解决上述问题,本发明的目的在于提高光栅尺运动精度,提供一种减小光栅尺的阿贝误差的方法。
8.为实现上述目的,本发明采用以下具体技术方案:
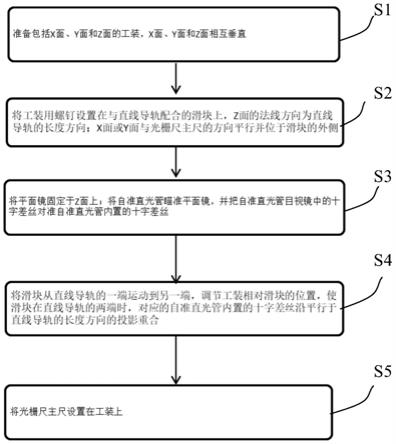
9.一种减小光栅尺的阿贝误差的方法,包括以下步骤:
10.s1、准备包括x面、y面和z面的工装,x面、y面和z面相互垂直;
11.s2、将工装用螺钉设置在与直线导轨配合的滑块上,z面的法线方向为直线导轨的长度方向;x面或y面与光栅尺主尺的方向平行并位于滑块的外侧;
12.s3、将平面镜平行固定于z面上;
13.自准直光管瞄准所述平面镜,并将自准直光管目视镜中的十字差丝对准所述自准直光管内置的十字差丝;
14.s4、将滑块从直线导轨的一端运动到另一端,调节工装相对滑块的位置,使滑块在直线导轨的两端时,自准直光管内置的十字差丝沿平行于直线导轨的长度方向的投影重合;
15.s5、将光栅尺主尺设置在工装上。
16.进一步的,工装为长方体。
17.进一步的,在步骤s4中,调整工装相对滑块的位置包括:在工装和滑块之间设置垫片层以改变工装相对滑块的位置。
18.进一步的,在步骤s4中,调整工装相对滑块的位置包括:在松开螺钉后调整工装位置再次拧紧螺钉以改变工装相对滑块的位置。
19.进一步的,在步骤s4中,调整工装相对滑块的位置包括:在工装和滑块之间设置胶水层以改变工装相对滑块的位置。
20.本发明能够取得以下技术效果:
21.本发明利用平面镜与自准直光管配合,使得装调光栅尺主尺与直线导轨的运动轴线之间夹角最小,大大降低了直线测量中的阿贝误差数值,提高了测量精度;方法简单且成本低。
附图说明
22.图1是现有技术的阿贝误差示意图;
23.图2是本发明实施例的减小光栅尺的阿贝误差的方法的流程图;
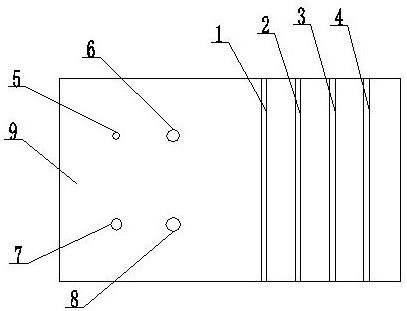
24.图3是本发明实施例的直线导轨和滑块的结构示意图;
25.图4是本发明实施例的修正前光栅尺的位移测量曲线;
26.图5是本发明实施例的修正前光栅尺的位移测量曲线。
27.附图标记:
28.工装1、直线导轨2、滑块3、平面镜4、光栅尺主尺5。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
30.如图2
‑
3所示,一种减小光栅尺的阿贝误差的方法,包括以下步骤:
31.s1、准备包括x面、y面和z面的工装1,x面、y面和z面相互垂直。
32.具体的,做一个三面相互垂直的工装1,三面为x面、y面和z面。如易于加工的长方体或立方体结构。本领域技术人员容易想到三个面要有很高的平面度,平面度越高,阿贝误差越小。平面度至少为0.003mm。
33.s2、将工装1用螺钉设置在与直线导轨2配合的滑块3上,z面的法线方向为直线导轨2的长度方向;x面或y面与光栅尺主尺5的方向平行,是为了在调整阿贝误差后在x面或y面上安装光栅尺主尺5。
34.具体的,滑块3上设置有工装安装平面,用螺钉将工装1安装在工装平面上,优选的螺钉的轴线垂直于工装安装平面。安装工装1时,x面的方向设置为与滑块3上需要安装光栅尺的平面的方向相同。安装工装1时,使z面垂直于直线导轨2的长度方向。同时将工装1用螺钉固定在直线导轨2平面上以便于后述的调节工装1的位置。优选的,使用四个螺钉将立方体的工装1的四角安装在滑块3上或者使用两个螺钉将长方体的工装的中间部位安装在滑块上。因为要利用螺钉来调节工装的位置,所以工装上与螺钉配合的螺钉孔优选为腰型孔。
安装工装1时,x面、y面要放置在滑块3的外侧,便于在调节阿贝误差完成后安装光栅尺主尺5。
35.s3、将平面平行固定于z面上,优选为本领域常用的粘接的技术手段,粘胶能使平面镜4和z面保持高精度的平行。
36.将自准直光管瞄准平面镜4,并把自准直光管目视镜中的十字差丝对准自准直光管内置的十字差丝。
37.来回推动直线导轨2带动工装1与平面镜4,这时自准直光管目视镜中的十字差丝会有晃动,因为十字差丝的像位置依附于平面镜4与自准直光管角度。
38.s4、将滑块3从直线导轨2的一端运动到另一端,调节工装1相对滑块3的位置,使滑块3在直线导轨2的两端时,自准直光管内置的十字差丝沿平行于直线导轨2的长度方向的投影重合。
39.具体的,直线导轨2从一端运动到另一端十字差丝会沿x方向与y方向移动,说明直线导轨2沿x方向与y方向都存在阿贝误差。那么调节工装1使得直线导轨2在两端的两个位置时,对应的自准直光管内置的十字差丝的连线应尽可能与直线导轨2的长度方向平行,此时,说明平面镜4无限趋近于垂直直线导轨2运动轨迹。
40.优选的,通过在工装1和滑块3之间设置垫片层或胶水层以改变工装1相对滑块3的位置。初始安装工装1时,工装1和滑块3的工装安装平面接触,两者之间的间隔为0。当需要调整工装1的位置从而改变平面镜4的位置时,可以在工装1和滑块3之间设置一个或多个垫片层或胶水层,使两者之间具有不均匀的间隔,从而将工装1的位置进行调整。
41.优选的,通过在松开螺钉后调整工装1位置再次拧紧螺钉以改变工装1相对滑块3的位置。这部分技术方案可以参见螺钉领域的常用技术手段,例如工装1上安装螺钉的螺钉孔为腰型孔,带有调整空间;或者螺钉的数量为一个等,这里不再赘述。
42.优选的,通过敲击工装1使工装1在工装安装平面内可以旋转,以改变相对滑块3的位置。
43.s5、将光栅尺主尺5设置在工装1上。
44.具体的,将平面镜4拆卸下,最后将直线光栅尺主尺5借助工装1将光栅尺主尺5安装在滑块3上。因z面经过步骤s5中平面镜4无限趋近于垂直直线导轨2运动轨迹的调整,z面已经保持了高精度的垂直于直线导轨2运动方向的方向布置,而x面、y面又和z面互相垂直,可以按需要将直线光栅尺主尺5安装在x面或y面上,达到直线光栅尺与直线导轨2的长度方向高度一致。
45.此时直线光栅尺主尺5与直线导轨2的运动轨迹的轴线夹角θ最小,那么阿贝误差也随之最小。如图4
‑
5所示,每个图包含3条曲线,中间的曲线记录为直线光栅尺主尺5在滑块上沿直线导轨运动的位移变化,上下两条曲线反应的分别是对位移变化的一阶导数也就是速度误差曲线,图4记录了用本方法修正前直线光栅尺主尺5的运动轨迹,图5记录了用本方法修正后直线光栅尺主尺5的运动轨迹,两个图的栅格的单位长度均相同,可以看出使用本方法,降低了阿贝误差。
46.本发明的成本低,特别是有些光栅尺的精度要求不是十分高,不需要实时对阿贝误差进行补偿的方法时,而本方法不需要精密的控制仪器,又能在一定程度提高光栅尺的精度。
47.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
48.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
49.以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。