1.本实用新型涉及榴莲开壳技术领域,更具体的说是涉及一种振动式榴莲自动开壳脱肉机。
背景技术:
2.近年来榴莲大量从国外进口,虽然其售价昂贵,但还是深受国内大众的喜爱。针对榴莲开壳取肉难的问题,国内出现了一些开榴莲的装置。但是,榴莲开壳取肉的机械化程度还不容乐观,虽然取得了一定的进展,如榴莲开壳方面专利文献cn210095434u公开的一种榴莲果壳开壳器,该开口器用较小的力,可将榴莲果壳打开,小巧实用、单手操作,降低手被榴莲外壳划伤的风险,便于清洁,降低了果肉沾染细菌的可能性。专利文献cn209377280u公开的一种榴莲用剥壳取肉设备,包括底板、套筒、插杆、内置底板、橡胶减震块、支撑顶杆、固定杆、抵板和第一支杆,底板的顶端固定有放置盘,且放置盘中心位置处的底板内部开设有根部插槽,底板顶端的两侧皆竖向固定有套筒,且套筒上皆设置有插杆,插杆的顶端固定有支撑顶杆,支撑顶杆的中间位置处焊接有固定杆,且固定杆的底端均匀焊接有抵板,抵板的底端均匀固定有第一刀片,固定杆的上方设置有顶盖,且顶盖的顶端固定有拉手,顶盖的底端均匀固定有第一铰接轴,且第一铰接轴的一端皆固定有第一支杆,第一支杆的一端皆连接有第二铰接轴,且第二铰接轴的一端皆连接有第二支杆,第二支杆与固定杆之间通过第三铰接轴连接,第三铰接轴延伸至固定杆下方的一端皆固定有第二刀片,第一铰接轴内侧的顶盖底端焊接有承接杆,固定杆的内部开设有内槽,承接杆延伸至内槽内部,承接杆与固定杆之间通过固定插杆固定。上述榴莲开壳器的出现减少人们接触榴莲外壳的时间、提高开壳效率,但是整体并未改变人们的开壳模式,还是以手工开壳为主。为此,如何提供一种能自动给榴莲开壳脱肉的设备是本领域技术人员亟需解决的问题。
技术实现要素:
3.为此,本实用新型的目的在于提出一种振动式榴莲自动开壳脱肉机,解决现有技术中榴莲开壳需手工完成的问题。
4.本实用新型提供了一种振动式榴莲自动开壳脱肉机,包括:
5.机壳,所述机壳通过底座固定于地面,所述机壳内部由上至下依次分成伸缩旋转开壳机构安装腔、开壳振动腔及旋转机构安装腔;进料口和出料口均开设于所述开壳振动腔侧壁上;
6.旋转机构,所述旋转机构位于所述旋转机构安装腔内,提供水平旋转力;
7.固定工位,所述固定工位处于所述开壳振动腔底部,其底部连接所述旋转机构,且靠近所述进料口布置;
8.伸缩旋转开壳机构,所述伸缩旋转开壳机构至少部分位于所述伸缩旋转开壳机构安装腔内;
9.开壳头,所述开壳头顶部连接向下伸入所述伸缩旋转开壳机构安装腔的所述伸缩
旋转开壳机构输出端,所述开壳头底部对应所述固定工位旋转及上下运动;
10.以及振动脱肉机构,所述振动脱肉机构位于所述旋转机构一侧,且位于所述固定工位下方,并靠近所述出料口处。
11.本实用新型公开提供了一种振动式榴莲自动开壳脱肉机,该开壳脱肉机开壳脱肉速度快、效率高,且使用方便;可实现连续开壳脱肉,有效的降低了工人劳动强度与成本,并且可以有效避免人被榴莲壳扎伤。
12.进一步地,所述旋转机构包括:第一电机、第一小锥齿轮、第一大锥齿轮、大锥齿轮轴以及第一不完全齿轮;所述第一电机水平固定于所述旋转机构安装腔内部,其输出轴端部连接有所述第一小锥齿轮;所述第一大锥齿轮竖直转动支撑于所述旋转机构安装腔底部,其一侧与所述第一小锥齿轮啮合传动;所述第一大锥齿轮顶部连接有所述大锥齿轮轴,所述大锥齿轮轴顶部通过所述第一不完全齿轮连接所述固定工位。
13.进一步地,所述固定工位包括:第二竖直轴、三脚架、固定盘及单向锁止部;所述第二竖直轴与所述大锥齿轮轴并列设置于所述旋转机构安装腔内,所述大锥齿轮轴顶部设置有第一不完全齿轮,所述第二竖直轴上设置有与所述第一不完全齿轮配合的第一完全齿轮;所述第二竖直轴顶部向上伸入所述开壳振动腔,所述三脚架底部对应连接所述开壳振动腔的内壁上,且所述三脚架与所述第二竖直轴通过连接件连接;所述固定盘为多个,均可拆卸于所述三脚架顶部;所述单向锁止部包括相互配合锁止的第一棘轮及第一棘爪,所述第一棘轮固定于所述第二竖直轴上,所述第一棘爪固定于所述旋转机构安装腔内。
14.进一步地,每一个所述固定盘均包括圆形托盘、连接杆及护板;所述圆形托盘底部设置有所述连接杆,所述连接杆与所述三脚架顶部设置的连接孔螺纹连接;所述圆形托盘顶部沿圆周方向设置有多个向上布置的所述护板,所述护板为三角形板。
15.进一步地,伸缩旋转开壳机构包括第二电机、第二小锥齿轮、第二大锥齿轮、第三竖直轴、第二不完全齿轮、第四竖直轴、第二完全齿轮及液压缸;所述第二电机水平固定于所述伸缩旋转开壳机构安装腔内,其输出端连接所述第二小锥齿轮,所述第二大锥齿轮转动支撑于所述伸缩旋转开壳机构安装腔底部,且与所述第二小锥齿轮啮合传动,所述第二大锥齿轮上连接有所述第三竖直轴,所述第二不完全齿轮固定于所述第三竖直轴上;所述第四竖直轴与所述第三竖直轴并列布置、且转动支撑于所述伸缩旋转开壳机构安装腔内,其上固定有与所述第二不完全齿轮啮合传动的第二完全齿轮;所述第四竖直轴底部连接有锁定棘齿,且所述第四竖直轴底部穿出所述伸缩旋转开壳机构安装腔后连接所述液压缸,所述开壳头固定于所述液压缸下部。
16.进一步地,所述液压缸通过液压管路连接位于所述伸缩旋转开壳机构安装腔内的液压动力机
17.进一步地,所述开壳头包括锥形头和均匀分布在所述锥形头周围方向的三角形刀片,所述三角形刀片通过螺栓与所述锥形头连接。
18.进一步地,所述振动脱肉机构包括:第三小锥齿轮、第一水平轴、第一皮带轮、第二水平轴、第二皮带轮、振动框、振动盘;所述第一水平轴水平转动支撑于所述旋转机构安装腔内,其一端固定有所述第三小锥齿轮,所述第三小锥齿轮与所述第一大锥齿轮另一侧啮合传动,所述第一水平轴另一端固定有所述第一皮带轮;所述第二水平轴转动支撑于所述旋转机构安装腔内、且位于所述第一水平轴上方,其一端设置有所述第二皮带轮,所述第一
皮带轮和所述第二皮带轮通过皮带连接;所述第二水平轴另一端固定有振动杆轴,所述振动杆轴连接所述振动盘,所述振动盘摆动于所述振动框内。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
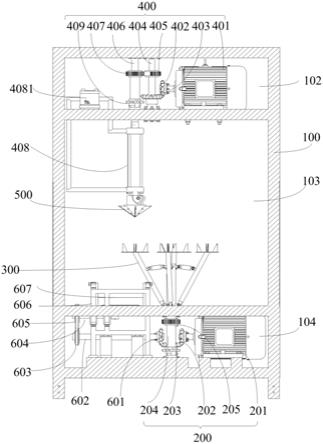
20.图1附图为本实用新型提供的一种振动式榴莲自动开壳脱肉机主视图的剖视图的结构示意图;
21.图2附图为本实用新型提供的一种振动式榴莲自动开壳脱肉机侧视图剖视图的结构示意图;
22.图3附图示出了固定工位结构示意图;
23.图4附图为图3的俯视图;
24.图5附图示出了固定盘的结构;
25.图6附图示出了开壳头的结构;
26.图7附图示出了振动脱肉机构的结构(为振动式榴莲自动开壳脱肉机横截面示意图);
27.图中:100
‑
机壳,101
‑
底座,102
‑
伸缩旋转开壳机构安装腔,103
‑
壳振动腔,104
‑
旋转机构安装腔,200
‑
旋转机构,201
‑
第一电机,202
‑
第一小锥齿轮,203
‑
第一大锥齿轮,204
‑
大锥齿轮轴,205
‑
第一不完全齿轮,300
‑
固定工位,301
‑
第二竖直轴,3011
‑
第一完全齿轮,302
‑
三脚架,303
‑
固定盘,3031
‑
圆形托盘,3032
‑
连接杆,3033
‑
护板,304
‑
单向锁止部,3041
‑
第一棘轮,3042
‑
第一棘爪,400
‑
伸缩旋转开壳机构,401
‑
第二电机,402
‑
第二小锥齿轮,403
‑
第二大锥齿轮,404
‑
第三竖直轴,405
‑
第二不完全齿轮,406
‑
第四竖直轴,407
‑
第二完全齿轮,408
‑
液压缸,4081
‑
液压动力机,409
‑
锁定棘齿,500
‑
开壳头,501
‑
锥形头,502
‑
三角形刀片,600
‑
振动脱肉机构,601
‑
第三小锥齿轮,602
‑
第一水平轴,603
‑
第一皮带轮,604
‑
第二水平轴,605
‑
第二皮带轮,606
‑
振动框,607
‑
振动盘,608
‑
振动杆轴。
具体实施方式
28.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
29.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者
隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
31.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
32.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
33.参见附图1
‑
7,本实用新型实施例公开了一种振动式榴莲自动开壳脱肉机,包括:机壳100,机壳100通过底座101固定于地面,机壳100内部由上至下依次分成伸缩旋转开壳机构安装腔102、开壳振动腔103及旋转机构安装腔104;进料口和出料口均开设于开壳振动腔103侧壁上;旋转机构200,旋转机构200位于旋转机构安装腔104内,提供水平旋转力;固定工位300,固定工位300处于开壳振动腔103底部,其底部连接旋转机构200,且靠近进料口布置;伸缩旋转开壳机构400,伸缩旋转开壳机构400至少部分位于伸缩旋转开壳机构安装腔102内;开壳头500,开壳头500顶部连接向下伸入伸缩旋转开壳机构安装腔102的伸缩旋转开壳机构400输出端,开壳头500底部对应固定工位300旋转及上下运动;以及振动脱肉机构600,振动脱肉机构600位于旋转机构200一侧,且位于固定工位300下方,并靠近出料口处。
34.底座呈l形,一个板有两个通孔,其与机壳通过螺栓固定连接,另一个板上有一个通孔,其与安装在地面上的螺栓固定连接。
35.参见附图1,旋转机构200包括:第一电机201、第一小锥齿轮202、第一大锥齿轮203、大锥齿轮轴204以及第一不完全齿轮205;第一电机201水平固定于旋转机构安装腔104内部,其输出轴端部连接有第一小锥齿轮202;第一大锥齿轮203竖直转动支撑于旋转机构安装腔104底部,其一侧与第一小锥齿轮202啮合传动;第一大锥齿轮203顶部连接有大锥齿轮轴204,大锥齿轮轴204顶部通过第一不完全齿轮205连接固定工位300。
36.其中,第一小锥齿轮202与第一大锥齿轮203齿数比例为1:2,第一不完全齿轮205齿数为第一大锥齿轮203齿数的四分之一,从而实现90度的旋转。
37.参见附图2和3,固定工位300包括:第二竖直轴301、三脚架302、固定盘303及单向锁止部304;第二竖直轴301与大锥齿轮轴204并列设置于旋转机构安装腔104内,大锥齿轮轴204顶部设置有第一不完全齿轮205,第二竖直轴301上设置有与第一不完全齿轮205配合的第一完全齿轮3011;第二竖直轴301顶部向上伸入开壳振动腔103,三脚架302底部对应连接开壳振动腔103的内壁上,且三脚架302与第二竖直轴301通过连接件连接;固定盘303为多个,均可拆卸于三脚架302顶部;单向锁止部304包括相互配合锁止的第一棘轮3041及第一棘爪3042,第一棘轮3041固定于第二竖直轴301上,第一棘爪3042固定于旋转机构安装腔
104内。
38.参见附图3
‑
5,每一个固定盘303均包括圆形托盘3031、连接杆3032及护板3033;圆形托盘3031底部设置有连接杆3032,连接杆3032与三脚架302顶部设置的连接孔螺纹连接;圆形托盘3031顶部沿圆周方向设置有多个向上布置的护板3033,护板3033为三角形板。为了方便固定盘根据榴莲大小进行相应的更换;榴莲固定盘则通过三角形结构的支撑杆与竖直传动轴连接,杆与杆、杆与竖直传动轴之间通过螺栓连接。
39.参见附图1,伸缩旋转开壳机构400包括第二电机401、第二小锥齿轮402、第二大锥齿轮403、第三竖直轴404、第二不完全齿轮405、第四竖直轴406、第二完全齿轮407及液压缸408;第二电机401水平固定于伸缩旋转开壳机构安装腔102内,其输出端连接第二小锥齿轮402,第二大锥齿轮403转动支撑于伸缩旋转开壳机构安装腔102底部,且与第二小锥齿轮402啮合传动,第二大锥齿轮403上连接有第三竖直轴404,第二不完全齿轮405固定于第三竖直轴404上;第四竖直轴406与第三竖直轴404并列布置、且转动支撑于伸缩旋转开壳机构安装腔102内,其上固定有与第二不完全齿轮405啮合传动的第二完全齿轮407;第四竖直轴406底部连接有锁定棘齿409,且第四竖直轴406底部穿出伸缩旋转开壳机构安装腔102后连接液压缸408,开壳头500固定于液压缸408下部。
40.第四竖直轴406为阶梯轴,目的是为了防止上面的齿轮滑落。第二不完全齿轮齿数为第二大锥齿轮齿数的四分之一,从而实现90度的旋转。锁定棘齿也与一个棘爪配合实现单向锁紧。
41.有利的是,液压缸408通过液压管路连接位于伸缩旋转开壳机构安装腔102内的液压动力机4081。
42.参见附图6,开壳头500包括锥形头501和均匀分布在锥形头501周围方向的三角形刀片502,三角形刀片502通过螺栓与锥形头501连接。
43.参见附图7,振动脱肉机构600包括:第三小锥齿轮601、第一水平轴602、第一皮带轮603、第二水平轴604、第二皮带轮605、振动框606、振动盘607;第一水平轴602水平转动支撑于旋转机构安装腔104内,其一端固定有第三小锥齿轮601,第三小锥齿轮601与第一大锥齿轮203另一侧啮合传动,第一水平轴602另一端固定有第一皮带轮603;第二水平轴604转动支撑于旋转机构安装腔104内、且位于第一水平轴602上方,其一端设置有第二皮带轮605,第一皮带轮603和第二皮带轮605通过皮带连接;第二水平轴604另一端固定有振动杆轴608,振动杆轴608连接振动盘607,振动盘607摆动于振动框606内。
44.振动脱肉机构布置在固定工位的下方,其通过振动框底部的四个带有通孔的矩形凸台与机壳螺栓连接。振动盘和固定工位之间由第一电机通过齿轮传动以及皮带传动实现配合振动,第一电机同时给固定工位的旋转及振动盘的振动提供动力。
45.本实用新型机构结构简单合理,经济耐用,维护、操作简单,开壳脱肉速度快、开壳脱肉率高;本实用新型整体采用了直齿轮传动机构、液压传动系统机构、锥齿轮传动机构、皮带传动机构以及棘轮机构去实现对榴莲的自动化开壳脱肉。经历了榴莲的需求分析、装置的可行性研究、装置机构的设计以及装置机构功能如何实现等过程。
46.振动式榴莲自动开壳脱肉机主要是通过带有刀片的开壳头的上下往复运动、旋转运动,榴莲固定工位的旋转运动以及振动盘的振动实现榴莲的开壳脱肉。第一电机为榴莲固定工位以及振动盘提供动力,第二电机以及液压动力机为带有刀片的开壳头提供动力,
最终实现送料、开壳、脱肉一体化。
47.进行榴莲开壳脱肉时,先通过底座与地面固定连接,然后启动第一电机,通过齿轮传动机构,第一电机带着大锥齿轮轴运动,大锥齿轮轴与第二竖直传动轴之间通过不完全齿轮与完全齿轮配合实现送料装置的旋转角度控制,从而将榴莲固定工位准确送到带有刀片的开壳头下方,这时第一棘爪与第一棘轮组成的单方向锁紧机构防止第二竖直传动轴转动,再启动液压动力机,通过液压传动系统,液压动力机带着带有刀片的开壳头往下运动深入下方榴莲一定的深度,再启动第二电机,通过齿轮传动机构,第二电机带着第三竖直传动轴运动,第三竖直传动轴与第四竖直传动轴之间通过不完全齿轮和完全齿轮配合实现旋转角度的控制,从而对榴莲进行开壳,最后启动第一电机,在榴莲固定工位送下一个榴莲进行开壳的同时,通过齿轮传动以及皮带传动机构,第一电机带着振动盘运动从而实现榴莲的振动脱肉,如此往复进行。
48.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
49.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。