1.本技术涉及工程监理的领域,尤其是涉及一种施工现场远程监理系统。
背景技术:
2.在建筑工程的施工建设过程中,监理工程师需要对现场施工进行管控,以便及时纠正施工过程中产生的工序错误、质量缺陷等问题,在保证工程的质量方面有着重要意义。而为了方便监理人员对现场各个施工部位的管控,进而会在施工现场安装远程监控系统,以减少监理人员忙于向多个施工部位奔波的情况。
3.公告号为cn111664328a的中国发明专利公开了一种施工现场视频监控系统,其包括安装于施工现场的底座、设置于底座上的用于监控现场的无线摄像头以及设置于底座内的用于传输无线摄像头监控画面的信息传输单元,所述底座上固定有竖直设置的固定柱,所述固定柱上套设有用于安装所述无线摄像头的安装套,所述固定柱顶部还设有用于驱动所述安装套竖直移动的驱动装置;上述相关技术具有调节无线摄像头高度的效果,使得无线摄像头监控的施工位置更全面。
4.针对上述中的相关技术,发明人认为施工现场的环境较为复杂,容易对相关技术造成破坏。比如遇到风雨天气、泥尘较重、有物体靠近时,相关技术的底座、固定柱以及无线摄像头容易受到雨水、泥尘的侵蚀以及物体的撞击。其次,相关技术中为了方便工人移动底座,一般会在底座上增加滚轮以方便其移动,但这样会导致底座容易在滚轮的滚动下自行移动位置,从而影响无线摄像头对现场的监控效果。
技术实现要素:
5.为了使得监控系统不易受到环境影响且监控时更加稳定,本技术提供一种施工现场远程监理系统。
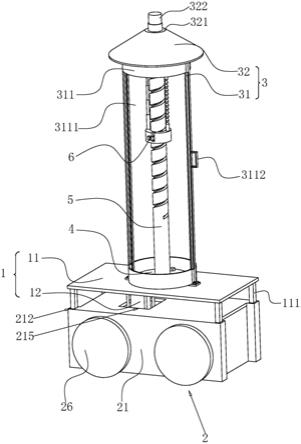
6.本技术提供的一种施工现场远程监理系统采用如下的技术方案:一种施工现场远程监理系统,其包括底座、设置在所述底座上的固定柱以及滑动设置在所述固定柱上的无线摄像头,还包括支撑机构、行走机构以及防护机构;所述行走机构以及所述防护机构均设置在所述支撑机构上,所述底座、固定柱以及无线摄像头均设置在所述防护机构内;所述行走机构用于带动所述支撑机构以及防护机构移动;所述支撑机构用于增强所述底座、固定柱以及无线摄像头的稳定性;所述防护机构用于保护所述底座、固定柱以及无线摄像头。
7.通过采用上述技术方案,支撑机构提高了本技术位于施工现场的稳定性;行走机构提高了本技术的可移动性,便于及时规避施工现场某些移动中的物体、设备带来的伤害;防护机构在一定程度上提高了本技术对雨水、泥尘的防护能力;使得本技术在施工现场中不易受到环境影响且监控时更加稳定。
8.可选的,所述支撑机构包括支撑板以及气缸;所述气缸设置在支撑板正对地面的板面上,且所述气缸的活塞杆竖直向下延伸,所述气缸远离所述支撑板的活塞杆端与所述行走机构相连接;所述支撑板正对地面的板面上竖直设置有支腿;所述支撑板背离地面的
一侧与所述防护机构相连接,当所述气缸的活塞杆收缩时,所述行走机构离开地面,所述支腿远离支撑板的一端与地面相抵接。
9.通过采用上述技术方案,当本技术需固定位置进行监控时,收缩气缸的活塞杆,气缸的活塞杆带动行走机构上升离开地面,同时,支撑板的支腿下降抵在地面上,相邻支腿之间的距离大于底座的直径,支撑机构以及行走机构均位于本技术靠近地面的部位,使得本技术的重心下降,进而使得支撑机构一定程度上提高了本技术竖立在施工现场的稳定性。
10.可选的,所述行走机构包括壳体、电机、第一行走齿轮、第二行走齿轮、转动轴以及滚轮;所述壳体内部中空设置;所述电机设置在所述壳体内部,所述第一行走齿轮与所述电机的输出轴同轴线相连接;两根所述转动轴转动设置在所述壳体内,且两根所述转动轴的长度方向与所述电机的输出轴的长度方向相平行,两根所述转动轴的两端穿过所述壳体的壁面后延伸至所述壳体的外侧,所述转动轴的端部设置有所述滚轮;所述第二行走齿轮同轴线连接在所述转动轴上,且所述第一行走齿轮与所述第二行走齿轮相啮合;所述壳体远离地面的一侧面上开设有伸缩口,所述气缸的活塞杆伸长时,所述气缸从伸缩口处伸至所述壳体内,且所述气缸的活塞杆端部与所述壳体的内底壁相连接。
11.通过采用上述技术方案,当本技术需移动位置时,将气缸的活塞杆伸出气缸的缸体,气缸带动支撑板的支腿上升离开地面,同时,气缸带动行走机构下降,使得行走机构与地面相抵接;通过远程遥控启动电机,电机将转动力传送至第一行走齿轮,第一行走齿轮将转动力传至第二行走齿轮,第二行走齿轮转动带动转动轴转动,进而使得滚轮在地面转动,实现了行走机构自动带动本技术在施工现场移动较为方便的效果,进而有利于本技术及时避开一些移动物体带来的碰撞伤害,并且方便本技术对施工现场不同的部位进行监控。
12.可选的,当所述气缸的活塞杆收缩时,所述壳体远离地面的一侧面与所述支撑板靠近地面的一侧面相贴合,所述气缸穿过所述伸缩口全部伸进至所述壳体内。
13.通过采用上述技术方案,当气缸的活塞杆收缩回气缸的缸体时,气缸带动行走机构上升离开地面,使得壳体远离地面的一侧面与支撑板靠近地面的一侧面相贴合,此时气缸从伸缩口处全部伸入到壳体的内部,使得在本技术固定位置对施工现场进行监控时,将气缸保护在壳体的内部。
14.可选的,所述壳体上沿竖直方向开设有滑槽,所述支腿插入所述滑槽内且与所述滑槽滑动配合。
15.通过采用上述技术方案,当气缸的活塞杆伸出或者收缩时,气缸的活塞杆带动支撑板上升或者下降,进而使得支撑板的支腿在壳体的滑槽内滑动上升或者下降,实现了支撑板离开地面的过程中能够保持稳定的效果。
16.可选的,所述防护机构包括防护柱以及防护盖;所述防护柱以及所述底座设置在所述支撑板远离地面的板面上,且所述防护柱分别在所述底座的两侧各竖直设置有一根;所述防护盖设置在两根所述防护柱远离地面的一端,所述防护盖用于将所述底座、固定柱以及无线摄像头在竖直方向进行遮挡。
17.通过采用上述技术方案,当下雨时,防护盖将对底座、固定柱以及无线摄像头起到遮挡保护作用,一定程度上阻止了雨水对底座、固定柱以及无线摄像头造成侵蚀的情况,提高了本技术在施工现场的防雨能力。
18.可选的,两根所述防护柱之间还设置有防护墙,所述防护墙以及防护柱形成一个
将所述底座、固定柱以及无线摄像头周向围住的围护体,且所述防护墙上设置有可视窗。
19.通过采用上述技术方案,当遇到风雨天气或者有泥尘即将粘附到底座、固定柱以及无线摄像头上时,防护墙将阻止雨水或者泥尘在防护墙之外,一定程度上阻止了底座、固定柱以及无线摄像头因粘附外部雨水、泥尘而被侵蚀的情况,提高了本技术的防风雨和泥尘能力,同时一定程度上提高了本技术防外物撞击的能力,防护墙上的可视窗便于无线摄像头对施工现场的监控。
20.可选的,所述防护墙与所述防护柱相铰连接,且所述防护墙上设置有把手。
21.通过采用上述技术方案,当无线摄像头出现故障时,通过把手打开防护墙,即可对无线摄像头进行维护,实现了维护无线摄像头较为方便的效果。
22.可选的,所述防护机构以及所述底座通过螺栓连接在所述支撑板上。
23.通过采用上述技术方案,当底座、固定柱以及无线摄像头出现较大范围故障时,需要从防护机构内取出再进行维修,防护机构以及底座均通过螺栓与支撑板相连接,以便对防护机构和底座进行拆卸,进而便于对无线摄像头等部件进行维护。
24.可选的,所述防护盖上设置有太阳能警示灯。
25.通过采用上述技术方案,防护机构上的太阳能警示灯,容易吸引施工现场施工人员对本技术的注意力,且太阳能警示灯节能环保,同时增强了施工人员对本技术的保护意识,一定程度上提高了本技术的防护能力。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.防护机构提高了本技术防风雨、泥尘侵蚀的能力;防护机构一定程度上提高了本技术防外物撞击的能力;防护机构上设置的太阳能警示灯增强了现场施工人员对本技术的保护意识;进而使得本技术在施工现场不易受到环境的影响且监控时更加稳定;防护机构以及底座均通过螺栓固定连接在支撑机构上,便于拆卸,并且防护机构设置有可开合的防护墙,实现了对底座、固定柱以及无线摄像头进行维修较为方便的效果;
28.2.行走机构使得本技术具有可移动的能力,便于通过远程遥控本技术及时避开一些移动的物体对本技术的撞击,一定程度上提高了本技术的不被外物撞击的能力;
29.3.支撑机构使得本技术竖立在施工现场中进行监控时的稳定性。
附图说明
30.图1是本技术实施例的结构示意图。
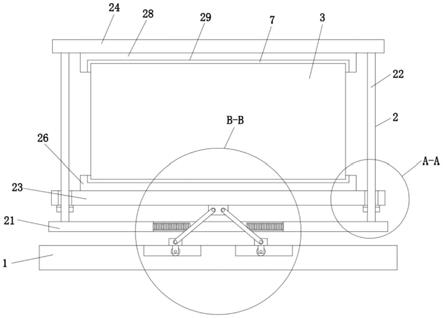
31.图2是本技术实施例的剖视图。
32.图3是图2中a
‑
a的剖视图。
33.附图标记说明:1、支撑机构;11、支撑板;111、支腿;12、气缸;121、y型接头;2、行走机构;21、壳体;211、连接块;212、滑槽;213、转动孔;214、轴承;215、伸缩口;22、电机;23、第一行走齿轮;24、第二行走齿轮;25、转动轴;26、滚轮;3、防护机构;31、防护柱;311、防护墙;3111、可视窗;3112、把手;32、防护盖;321、警示平台;322、太阳能警示灯;4、底座;5、固定柱;6、无线摄像头。
具体实施方式
34.以下结合附图1
‑
3对本技术作进一步详细说明。
35.本技术实施例公开一种施工现场远程监理系统。参照图1,施工现场远程监理系统包括支撑机构1、行走机构2以及防护机构3;行走机构2以及防护机构3均设置在支撑机构1上;支撑机构1用于加强本技术竖直立在施工现场中进行监控时的稳定性;行走机构2用于带动本技术在施工现场中移动以规避某些物体的撞击;底座4、固定柱5以及无线摄像头6均设置在防护机构3内,防护机构3用于将底座4、固定柱5以及无线摄像头6进行遮挡保护。
36.参照图1、图2,支撑机构1包括支撑板11以及气缸12;支撑板11正对地面的板面上竖直焊接有四根支腿111;气缸12的缸体部分与支撑板11正对地面的板面通过螺栓相连接,气缸12的活塞杆竖直向下延伸且与行走机构2相连接,气缸12的活塞杆可远程遥控,具体的遥控方式在本领域内是常见的,即通过一般的电学手段即可实现,此处不再赘述如何远程遥控;当本技术固定位置进行现场监控时,气缸12的活塞杆收缩回气缸12的缸体内,气缸12带动行走机构2离开地面,同时,支撑板11的支腿111与地面相抵接用以稳定支撑本技术。
37.参照图3,行走机构2包括壳体21、电机22、第一行走齿轮23、第二行走齿轮24、转动轴25以及滚轮26;壳体21内部中空设置;电机22通过螺栓连接在壳体21内部的底壁上,电机22可远程遥控,具体的遥控方式在本领域内是常见的,即通过一般的电学手段即可实现,此处不再赘述如何远程遥控;电机22的输出轴穿过第一行走齿轮23的内孔,内孔处于第一行走齿轮23的中心处,电机22的输出轴的外壁与第一行走齿轮23的内孔壁为间隙配合且通过平键相连接;壳体21上垂直于电机22的输出轴的两侧面上均开设有两个转动孔213,转动孔213内安装有轴承214,且轴承214的外壁与转动孔213的内孔壁为过渡配合;两根转动轴25的两端从轴承214的内孔穿出且延伸至壳体21的外侧,且转动轴25的外壁与轴承214的内孔壁为过渡配合;两根转动轴25的两端均与转动轴25同轴线固定设置有一个滚轮26;一根转动轴25穿过第二行走齿轮24的内孔,且转动轴25的外壁与第二行走齿轮24的内孔壁为间隙配合且通过平键相连接,第一行走齿轮23与第二行走齿轮24相啮合;结合图2,壳体21远离地面的一侧面上开设有伸缩口215,气缸12穿过伸缩口215伸至壳体21内部,壳体21靠近地面的一面上焊接有连接块211,气缸12的活塞杆靠近地面的端部与壳体21的连接块211通过y型接头121相连接;当气缸12的活塞杆伸出气缸12的缸体时,气缸12使得行走机构2的滚轮26与地面相抵接,通过远程遥控启动电机22,电机22将带动第一行走齿轮23以及第二行走齿轮24转动,第二行走齿轮24带动转动轴25转动,使得转动轴25带动滚轮26转动,进而使得本技术在施工现场进行移动。
38.参照图2,当气缸12的活塞杆收缩回气缸12的缸体内时,壳体21远离地面的一面与支撑板11靠近地面的一面相贴合,气缸12将全部位于壳体21内,使得本技术固定位置进行现场监控时,便于将气缸12保护在壳体21内部;壳体21的侧壁上沿竖直方向开设有滑槽212,支撑板11的支腿111插入滑槽212且与滑槽212滑动配合,当气缸12的活塞杆伸出气缸12的缸体时,支撑板11被气缸12顶住竖直上升,使得支撑板11的支腿111在滑槽212内滑动上升的过程中,使得支撑板11更加稳定。
39.参照图1、图2,防护机构3包括防护柱31以及防护盖32;防护柱31以及底座4均设置在支撑板11远离地面的一侧面上,且防护柱31在底座4的两侧分别竖直设置有一根,防护盖32焊接在两根防护柱31远离地面的一端,防护盖32在竖直方向上对底座4、固定柱5以及无线摄像头6起到了遮雨作用;两根防护柱31之间设置有两扇防护墙311,两扇防护墙311以及防护柱31将底座4、固定柱5以及无线摄像头6围护在内,防护墙311以及防护柱31对底座4、
固定柱5以及无线摄像头6的四周方向起到了遮挡作用;其中一扇或者两扇防护墙311与防护柱31相铰连接,与防护柱31相铰连接的防护墙311上焊接有把手3112,以便于通过把手3112将防护墙311打开并对无线摄像头6进行维护,防护墙311上设置有可视窗3111,以便无线摄像头6透过可视窗3111对施工现场进行监控。
40.参照图1、图2,底座4以及防护柱31均通过螺栓固定连接在支撑板11远离地面的一侧面上,当底座4、固定柱5以及无线摄像头6出现大范围故障需要取出再进行维修时,此时可通过将防护柱31以及底座4与支撑板11相连接的螺栓拆下,即可将底座4、固定柱5以及无线摄像头6拆出来进行维修;防护盖32上设置有警示平台321,警示平台321上通过螺栓固定有一个太阳能警示灯322,太阳能警示灯322将太阳能转化为电能,节能环保,且太阳能警示灯322开启时能够闪烁发光,对现场的施工人员起到警示作用,提醒施工人员注意保护本技术。
41.本技术实施例一种施工现场远程监理系统的实施原理为:将防护机构3的防护墙311关闭好后,再将本技术放置在施工现场,监理人员通过本技术对施工现场进行远程监控,当本技术不需要移动时,远程遥控将气缸12的活塞杆收缩至缸体内,行走机构2的滚轮26被气缸12带动离开地面,而支撑板11的支腿111将抵在地面上并支撑稳定住本技术,防护盖32以及防护墙311一定程度上对底座4、固定柱5以及无线摄像头6提供遮风雨、防泥尘粘附、防物体撞击的保护作用,同时警示平台321上的太阳能警示灯322会对现场施工人员起到警示作用;当发现本技术附近有物体靠近或者发现施工现场有的部位需要靠近观察时,通过远程遥控将气缸12的活塞杆伸出气缸12的缸体,支撑板11的支腿111被气缸12顶起而离开地面,并且行走机构2的滚轮26被气缸12推到与对面抵接的位置,然后远程遥控启动电机22,电机22将带动本技术移动,实现避开现场其他物体或者靠近现场施工部位进行观察的效果。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。