1.本实用新型属于航模技术领域,具体是一种蜂鸟航模比赛裁判系统。
背景技术:
2.近年来,国内以航模为代表的娱乐方式逐渐兴起,同时为了提升年龄较小的孩子对于航模的兴趣,实现航模行业的可持续发展并让一些专业的选手证明自己在航模领域的能力,各大城市的航模比赛举办数量逐渐增加,同时,在一些高校内,也出现了大量的逐年增长的航模兴趣社团,其举办活动的数量也逐年增加。相较于国内,国外的航模活动显得更为流行,拥有着更多的使用群体,使用航模作为娱乐方式的人群基数更大,国外也举办了更多数量的航模比赛。
3.随着各种航模比赛的举办数量不断上升,针对较为小众的航模竞速比赛,当前的裁判方法为裁判站在地面抬头目测航模的飞行状态,人工人为做出判决,但是这种方法效率低下,人工成本高且对于裁判来说,在飞机数目较多的情况下,长时间的站立或抬头使得评判变得很艰难。因此,我们提出了基于uwb定位系统的蜂鸟航模比赛裁判系统,该系统可以实现对无人机轨迹的精准记录,协助裁判进行更精准、更合理的判定。
技术实现要素:
4.本实用新型的目的是提供一种蜂鸟航模比赛裁判系统,解决在实际训练及考试时考官判分主观性强,参考数据不多,人工裁判困难,人工成本较高的问题。
5.为实现上述目的,本实用新型采用的技术方案是:
6.一种蜂鸟航模比赛裁判系统,包括手持终端、绑定在无人机上的定位标签和设置在地面的多个定位基站,所述手持终端与多个定位基站无线通信连接;所述定位标签以及多个定位基站均包括uwb定位芯片,多个所述定位基站与定位标签之间通过发射/接收uwb信号来定位无人机在空中的位置信息;所述手持终端用于获取所述定位基站获取的位置信息,并显示无人机的飞行参数。系统基于超宽带(uwb)技术和“空间测边定位技术”,卡尔曼滤波对空间中的无人机进行厘米级精度的定位,在终端显示轨迹和飞行参数评估,从而协助裁判人员更为准确的评分。
7.具体地,所述定位基站至少设有3个,定位基站的数量越多,定位越精确,相应的计算过程越复杂。
8.进一步地,多个所述定位基站与定位标签通过空间测边定位算法获取无人机在空中的位置信息。定位基站能测出定位标签距基站的距离,通过定位基站的信息采集和空间测边定位算法,建立三维坐标系确定飞行器在三维空间中的精确位置,确保定位误差不超过5厘米。
9.具体地,所述无人机上还设有姿态传感器,用于获取无人机的飞行姿态信息,所述姿态传感器与手持终端无线通信连接。
10.具体地,所述飞行参数包括无人机的飞行轨迹、实时位置、飞行时间、飞行速度和
飞行圈数。
11.具体地,所述手持终端与定位基站通过wi
‑
fi无线连接。
12.与现有技术相比,本实用新型的有益效果是:本实用新型通过在地面设置多个定位基站,并在无人机上绑定定位标签,定位基站可以测出标签距基站的距离,通过定位基站的信息采集和空间测边定位算法,建立三维坐标系便可以计算出飞行器在三维空间中的精确位置,对空间中的无人机进行厘米级精度的定位,在终端显示轨迹和飞行参数评估,从而协助裁判人员更为准确的评分。
附图说明
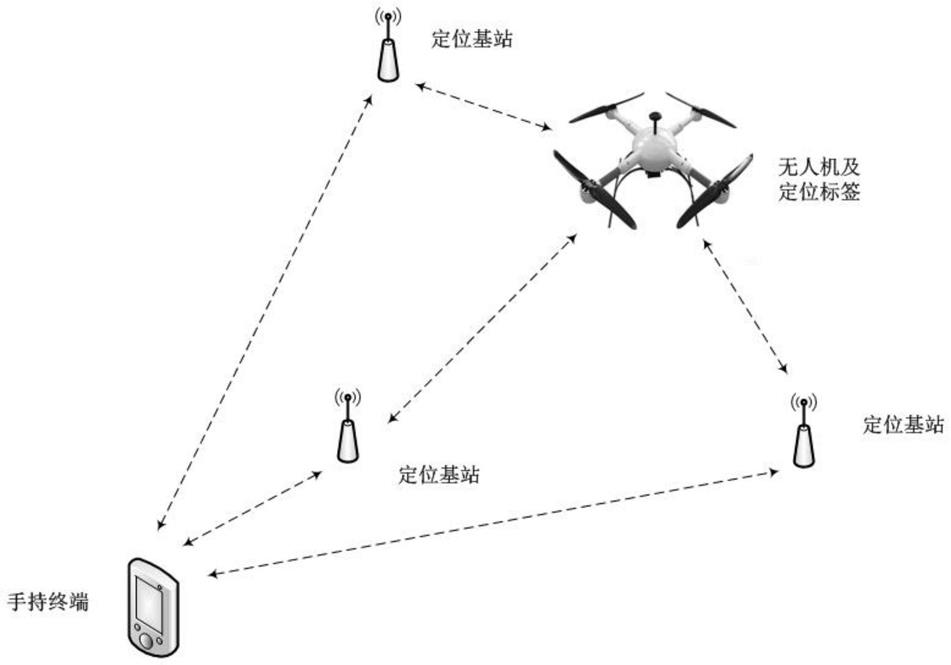
13.图1为本实用新型实施例一种蜂鸟航模比赛裁判系统的架构示意图;
14.图2为本实用新型实施例中利用空间测边定位算法定位无人机位置的原理示意图。
具体实施方式
15.下面将结合本实用新型中的附图,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本实用新型保护的范围。
16.如图1所示,本实施例提供了一种蜂鸟航模比赛裁判系统,包括手持终端、绑定在无人机上的定位标签和设置在地面的3个定位基站,所述手持终端与3个定位基站无线通信连接;所述定位标签以及3个定位基站均包括uwb定位芯片,3个所述定位基站与定位标签之间通过发射/接收uwb信号来定位无人机在空中的位置信息;所述手持终端用于获取所述定位基站获取的位置信息,并显示无人机的飞行参数。
17.航模的精确位置由uwb系统实时获取,uwb是一种无载波通信技术,利用纳秒至微秒级的非正弦波窄脉冲传输数据,我们利用信号到达的时间可以测出无人机与uwb基站的实时距离,同时uwb技术使得我们对于无人机在空间中的位置的精度可以达到厘米级。这也适用航模这样的体型较小的目标定位,具体应用在航模飞机竞速这样要求高精度的场景中也是再适合不过了。
18.另一方面,uwb技术使得
‘
蜂鸟’系统可以同时获得多个移动目标的三维空间坐标,并进一步得到他们的飞行时间,飞行圈数,飞行轨迹等数据,十分适合航模比赛这种多个目标需要同时测距的应用场景。
19.在飞行器绕赛道飞行时,在每一圈的起点处记录飞行器起点的三维坐标点位置,通过在比赛场地搭建的3座uwb定位基站和可安装在无人机上的定位标签可记录下飞机持续运动的三维坐标点,进而可得到飞机实时运行轨迹,将飞机实时运行轨迹运用数学方法进行拟合成三维空间曲线,将曲线在xoy坐标平面(即基于3个定位基站建立的坐标系)进行投影,当运行轨迹在xoy投影平面与起点位置重合时,则飞行器完成绕赛道一周的飞行。
20.飞行器在赛道上每一圈的飞行完成时,记录每一圈飞行结束时的三维空间坐标点,当判定飞行器已完成绕赛程一周时,保存之前运行数据,在手持移动终端更新飞行器最新一圈的运行轨迹,从而实现不同圈层的轨迹区分。
21.进一步地,3个所述定位基站与定位标签通过空间测边定位算法获取无人机在空中的位置信息。定位基站能测出定位标签距定位基站的距离,通过定位基站的信息采集和空间测边定位算法,建立三维坐标系确定飞行器在三维空间中的精确位置,确保定位误差不超过5厘米。
22.定位标签与定位基站均能发出和接收uwb信号,通过信号传输的时间τ,结合电磁波的速度c已知,由公式便可以求出距离l。有了距离,结合“空间测边定位法”便可求得飞行器在三维空间中的精确位置。
23.如图2所示,3个定位基站的标号分别为1、2、3,3个定位基站的位置可以根据场地大小随意摆放,但为了便于计算,优选根据3个定位基站的摆放位置建立直角坐标系,其中,1号定位基站位于原点,2号定位基站位于x轴,3号定位基站位于y轴,定位标签的位置为p点,3个定位基站的位置与定位标签的位置p符合右手螺旋定律,右手指向p所在方向。
24.设基站坐标为:1号(0,0,0);2号(x2,0,0);3号(0,y3,0);
25.无人机的坐标为:p(xp,yp,zp);
26.3个基站之间的距离分别为:d
12
(1号基站与2号基站的距离)、d
23
(2号基站与3号基站的距离)和d
13
(1号基站与3号基站的距离);
27.3个基站分别到无人机的距离为:s1(1号基站与无人机之间的距离)、s2(2号基站与无人机之间的距离)和s3(2号基站与无人机之间的距离);
28.根据计算可得p点坐标为:
[0029][0030][0031][0032]
其中,
[0033]
为1号基站到p点的连线与2号基站到p点的连线之间的夹角;为1号基站到p点的连线与3号基站到p点的连线之间的夹角;为2号基站到p点的连线与3号基站到p点的连线之间的夹角;
[0034]
由3个基站确定的平面方程为:z=0
[0035]
该平面指向p点的法向量为:
[0036]
计算p点到平面的垂距,若为正,则在平面上方,为负则在平面下方。
[0037]
为了尽可能的减小误差,引入了卡尔曼滤波法:
[0038]
卡尔曼滤波算法适用于解决噪声为高斯噪声的线性问题,但在实际应用中我们遇到的大多是非线性问题,由此提出了扩展卡尔曼滤波法。但是扩展卡尔曼滤波法会随着测量误差的增大而降低定位精度,但是使用自适应扩展卡尔曼滤波可以在测距误差增大时,保持良好的定位精度和收敛速度。
[0039]
具体地,所述无人机上还设有姿态传感器,用于获取无人机的飞行姿态信息,所述
姿态传感器与手持终端无线通信连接。
[0040]
本实施例中,手持终端用来接收来自定位基站发送的信息并将飞行器的飞行时间、圈数等结果显示在手持终端的显示屏上,也可以向基站发送命令,进行考试的准备(ready),开始(start),重置(ready)等操作控制。便于裁判在较远的地方对航模竞速比赛的成绩做出判决。
[0041]
手持终端配有wi
‑
fi连接模块,控制模块与显示模块,整体上不采用可拆卸电池供电,而是提供了充电口给锂电池供电,这样便于重复利用,可以节省成本和能源。为了后期的软件更新,手持终端还保留了升级串口,用于必要的软件更新和售后服务保障。
[0042]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。