1.本发明涉及海运集装箱监测领域,具体是海运集装箱丢失监测装置及防丢失预报警系统。
背景技术:
2.集装箱作为船舶及海陆联运的主要载体,在远洋航运过程中,由于航运周期长,路途长,经常会遭遇极端恶劣天气,如风暴,飓风等恶劣海况,船体摆幅过大,船舶上面加固的集装箱由于左右摆幅力度过大,常常会引起集装箱脱落或直接掉落海中。如果船方不能够及时发现和打捞,将会造成委托运输的货主巨大的财产损失,更有甚者,跌落的集装箱有可能会撞击其他船只,影响航道安全,长时间漂浮的集装箱还会出现泄漏,造成二次污染。在现有技术中即便通过绑扎桥或者锚杆进行多重加固措施,可是加固措施也集中在中间层,最上端两层仍然缺乏加固措施,无法避免集装箱丢失的现象。因此本领域的技术人员一直在寻求一种及时有效的监测海运集装箱丢失的装置和系统将成为行业的迫切需求。
技术实现要素:
3.本发明的目的是提供一种海运集装箱丢失检测装置,以解决背景技术中提到的问题。
4.为了解决上述问题,采用的技术方案为:
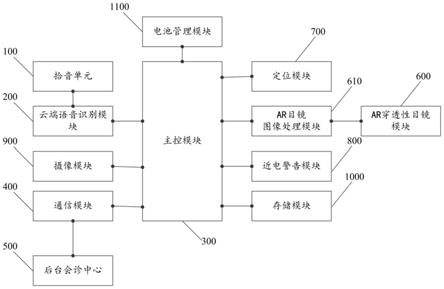
5.海运集装箱丢失监测装置及防丢失预报警系统,包括监测系统主机和监测从机装置,监测系统主机包括核心处理器,bd/gps定位单元、姿态监测单元、角度传感器、lora无线通信主机、数据存储单元、声光报警单元、触摸显示屏、主备电切换管理单元,所述bd/gps定位单元、姿态监测单元、角度传感器、lora无线通信主机、数据存储单元、声光报警单元、触摸显示屏、主备电切换管理单元均与所述核心处理器连接;
6.监测从机装置包括核心处理器、bd/gps接收机单元、加速度传感器、角度传感器、lora无线通信终端、数据存储单元、主备电切换管理单元、太阳能充电单元,所述核心处理器和bd/gps接收机单元、加速度传感器、角度传感器、lora无线通信终端、数据存储单元、主备电切换管理单元分别连接;所述监测系统主机和监测从机装置既相互独立,又实时通过lora无线通信单元保持通信;
7.监测时,监测系统主机实时获取监测从机装置的位置和角度传感器数据并进行数据存储和数据分析,获得目前监测对象的实时状态信息。
8.监测从机装置和主备电池装置共同固定在同一支架组件上,支架组件按照集装箱的标准尺寸设计,四个角分别为凸出的支脚,所述支脚与下方的集装箱顶部四个边角的凹洞插接为一体,与集装箱固定为一体,和集装箱同步动作,如摇晃,摆幅等,在极端情况下,当支架下面的集装箱跌落时,支架组件也会同步跌落。
9.改进地,一个监测主机系统最少能够控制6个监测从机装置。
10.所述防丢失预报警系统设置有3种模式,对应不同的应用场景:分别为入港模式、
装卸模式、出港模式:
11.1.在装卸模式下,系统主机自动关联船上指定区域内的监测设备,并能够实现监测从机设备与主机系统自动注册,自动关联和自动匹配绑定。
12.2.出港后,人工切换到出港模式,能够实时监测各个监测部位的摆幅数据,相对位置数据,预警数据,当集装箱发生跌落或者掉落时,能够及时触发本地声光报警,并在主机系统的触摸显示屏上指示集装箱跌落的大致位置。
13.3.进港后,人工切换到入港模式,主机系统自动解除所有关联匹配的监测从机设备,集装箱开始进行港口装卸时,切换到装卸模式,此模式下主机系统会重新进行自动注册和关联绑定监测从机。
14.所述防丢失预报警系统的具体算法
15.1.监测设备自动组网后的注册及退出的处理算法
16.a.当进入到入港模式时,主机系统依次向监测从机发送解除绑定命令,监测从机收到解除绑定命令后,回复命令接收成功,更改自身的通信状态为待注册状态,更改通信信道为广播信道,并处于监听模式。此处的通信信道频率为433mhz,主机系统收到监测从机的回复命令后,不再对该监测从机进行解除绑定广播;监测从机也不会主动发送绑定请求。
17.b.当进入到装卸模式下,主机系统在触摸显示屏上手动指定需要监测目标区域,主机系统根据自身的位置和选定的位置,进行目标区域的坐标计算,并在广播通道上轮循广播需要绑定的目标区域的坐标信息,绑定信道号和主机系统id。
18.此处所述的目标区域坐标的获取方式:在主机设备初次安装时,通过高精度定位接收机在船体的不同区域进行中心位置测量,对所有测量点进行静态测量,将测量得到的经纬度坐标数据传送给主机系统,主机系统获取自身的坐标和各个目标区域中心监测点的经纬度坐标,依次计算并记录每个目标区域中心监测点坐标与主机监测点坐标的经度相对偏差e1
‑
e6和纬度相对偏差w1
‑
w6;系统实际应用时,无论船体停靠在什么位置,当监测系统主机的触摸显示屏被选定目标区域s1时,监测系统主机先获取自身的实时坐标,然后将s1的经纬度偏差值叠加到监测系统主机测量的坐标,生成一个目标区域s1的中心点粗略经纬度坐标,其他的测试点也通过同样的方式进行计算获取。
19.c.在装卸模式下,监测从机设备收到广播的区域坐标后,进行自身当前位置定位,并判断自身位置是否处于目标坐标区域内,如果判断出自身处于选定的区域内,监测从机就立刻更改信道号,主动上报自己的id号进行绑定请求,监测主机收到绑定信号后,同意绑定请求,存储监测从机的id号,监测从机绑定成功后,系统主机广播未绑定的目标区域的监测从机设备,绑定后的监测从机根据分配的信道进行同步位置数据和通信规则信息,并等待进入离港模式。
20.d.进入离港模式,主机系统会主动发送模式开启信号,并同时进行最后一次整体同步信息和各个监测点初始状态的锁定;
21.2.集装箱跌落识别的处理算法
22.a.主机系统开启离港模式后,主机系统根据自身的姿态数据,广播给各个监测从机,各个监测从机收到同步命令后,在bd/gps模块的pps信号脉冲的上升沿,同步成功后开始检测自己的姿态数据(角度和加速度值),并将姿态数据和位置数据(经度和纬度数据)在自己的通信信道上传送给主机,同时记录自己的姿态数据。
23.b.主机收到各个监测从机的数据后,间隔10秒采集各个监测点的相对位置记录和姿态数据记录,并分别与前4次历史数据的进行对比分析,如果相对位置或者姿态数据发生较大偏离时,更改采集频率,提示系统满足报警条件。
24.c.监测从机进行跌落主动报警的触发条件:
25.正常情况下,监测从机在bd/gps模块的pps脉冲的上升沿,采集自身的姿态数据和位置数据,并传送给主机系统。
26.当集装箱发生跌落时,竖直方向的加速度值会瞬间增加,监测从机监测到自身加速度数据超过设定的阈值1.5g时,更改自身的数据采集周期为100ms,多次采集自身的姿态数据和角度数据,根据采集的历史数据进行对比分析,分析方法:将每次采集的数据放到对应数组内,如角度数据放到数组a[n],b[n],加速度数据放到数组x[n],y[n],z[n]中,每次检测到pps脉冲的上升沿,计算加速度数据及角度数据的最大变化量,以及角度的相对初始值变化量,将变化量数据置于新的数组内,当有加速度的最大变化量超过1.5g的阈值且角度相对变化量超过45
°
的阈值时,进行跌落主动报警。
[0027]
d.丢失报警的触发条件:
[0028]
当主机系统监测到某监测从机主动发送跌落报警时,更改监控主机采集从机数据采集周期为1s,快速采集和分析监测从机的相对位置变化以及相对姿态数据变化;当主机系统识别出监测从机位置坐标数据偏离目标区域的坐标范围,此处设定目标区域中心点经纬度坐标偏离
±
0.0001
°
或者直接产生信号失联时,触发声光报警单元进行丢失报警。
[0029]
3.主备电池自动切换的处理算法
[0030]
在主备电池接入监测从机后,监测从机分别定时采集主备电池的电压,计算出电池的剩余电量,根据主备电池各自的剩余电量来选择使用哪路进行供电,具体的切换算法如下:
[0031]
a.当主电池剩余电量大于等于10%时,当主电池供电线路剩余电量大于备用电池供电线路剩余电量时,选择主电池供电线路进行供电,否则选用备用电池供电线路进行供电;
[0032]
b.当主电池供应电路剩余电量小于10%时,分析备用电池供电线路的剩余电量,如果此时备用电池剩余电量大于10%时切换到备用电池供电线路供电,如果备用电池剩余电量也小于10%,则继续使用主电池供电线路,并且进行低电量报警,及时通知主机系统进行电池更换或及时检修。
[0033]
与现有技术相比,本发明的有益效果是:
[0034]
本发明能够有效地解决海运过程中,集装箱丢失的及时检测和报警的问题,同时系统与监测装置之间自动组网、自动识别、自动采集,有效减少了人工操作,及时报警提示和概略位置指示,有利于船方进行及时捕捞,减少经济损失。
附图说明
[0035]
图1为系统检测主机的结构框架图
[0036]
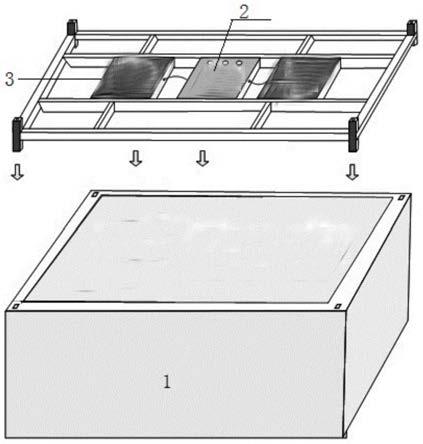
图2为监测从机装置的立体结构图;
[0037]
图3为监测从机装置的安装示意图;
[0038]
图4为监测从机装置的结构框架图;
[0039]
图5为系统监测主机和检测从机装置的通讯方式图;
[0040]
图6为安装六个检测从机装置的船舶俯视图。
[0041]
图中,1、集装箱,2、监测从机装置,3、太阳能电池单元,4、船头,5、船尾,6、监测点,7、监测主机系统。
具体实施方式
[0042]
下面将结合附图和实施例对本发明做进一步解释和说明。
[0043]
实施例1:请参阅图1
‑
6,海运集装箱丢失监测装置及防丢失预报警系统,包括监测系统主机和监测从机装置,监测系统主机包括核心处理器,bd/gps定位单元、姿态监测单元、角度传感器、lora无线通信主机、数据存储单元、声光报警单元、触摸显示屏、主备电切换管理单元,所述bd/gps定位单元、姿态监测单元、角度传感器、lora无线通信主机、数据存储单元、声光报警单元、触摸显示屏、主备电切换管理单元均与所述核心处理器连接,
[0044]
监测从机装置包括核心处理器、bd/gps接收机单元、加速度传感器、角度传感器、lora无线通信终端、数据存储单元、主备电切换管理单元、太阳能充电单元,所述核心处理器和bd/gps接收机单元、加速度传感器、角度传感器、lora无线通信终端、数据存储单元、主备电切换管理单元分别连接;所述监测系统主机和监测从机装置既相互独立,又实时通过lora无线通信单元保持通信;
[0045]
监测时,监测系统主机实时获取监测从机装置的位置和角度传感器数据并进行数据存储和数据分析,获得目前监测对象的实时状态信息。
[0046]
监测从机装置和主备电池装置共同固定在同一支架组件上,支架组件按照集装箱的标准尺寸设计,四个角分别为凸出的支脚,所述支脚与下方的集装箱顶部四个边角的凹洞插接为一体,与集装箱固定为一体,和集装箱同步动作,如摇晃,摆幅等,在极端情况下,当支架下面的集装箱跌落时,支架也会同步跌落。
[0047]
一个监测主机系统最少可以控制6个监测从机装置。
[0048]
所述防丢失预报警系统设置有3种模式,对应不同的应用场景:分别为入港模式、装卸模式、出港模式:
[0049]
1、在装卸模式下,系统主机自动关联船上指定区域内的监测设备,并能够实现监测从机设备与主机系统自动注册,自动关联和自动匹配绑定。
[0050]
2、出港后,人工切换到出港模式,能够实时监测各个监测部位的摆幅数据,相对位置数据,预警数据,当集装箱发生跌落或者掉落时,能够及时触发本地声光报警,并在主机系统的触摸显示屏上指示集装箱跌落的大致位置。
[0051]
3、进港后,人工切换到入港模式,主机系统自动解除所有关联匹配的监测从机设备,集装箱开始进行港口装卸时,切换到装卸模式,此模式下主机系统会重新进行自动注册和关联绑定监测从机。
[0052]
所述预报警系统的具体处理算法:
[0053]
1、监测设备自动组网后的注册及退出的处理算法
[0054]
a.当进入到入港模式时,主机系统向监测从机发送解除绑定命令,依次发送,监测从机收到解除绑定命令后,回复命令接收成功,更改自身的通信状态为待注册状态,更改通信信道为广播信道,并处于监听模式。此处的通信信道频率为433mhz,主机系统收到监测从
机的回复命令后,不再对该监测从机进行解除绑定广播。于是监测从机也不会主动发送绑定请求。
[0055]
b.当进入到装卸模式下,主机系统在触摸显示屏上手动指定需要监测目标区域,主机系统根据自身的位置和选定的位置,进行目标区域的坐标计算,并在广播通道上轮循广播需要绑定的目标区域的坐标信息,绑定信道号和主机系统id;
[0056]
此处所述的目标区域坐标的获取方式:在主机设备初次安装时,通过高精度定位接收机在船体的不同区域进行中心位置测量,以6个测量点为例,如图6所示,对船头s1,s2测量点,船中部s3,s4测量点,船尾s5,s6测量点进行静态测量,将测量得到的经纬度坐标数据传送给主机系统,主机系统获取自身的坐标和各个目标区域中心监测点的经纬度坐标,依次计算并记录每个目标区域中心监测点坐标与主机监测点坐标的经度相对偏差e1
‑
e6和纬度相对偏差w1
‑
w6;系统实际应用时,无论船体停靠在什么位置,当监测系统主机的触摸显示屏被选定目标区域s1时,监测系统主机先获取自身的实时坐标,然后将s1的经纬度偏差值叠加到监测系统主机测量的坐标,生成一个目标区域s1的中心点粗略经纬度坐标,其他的测试点也通过同样的方式进行计算获取。
[0057]
c.在装卸模式下,监测从机设备收到广播的区域坐标后,进行自身当前位置定位,并判断自身位置是否处于目标坐标区域内,如果判断出自身处于选定的区域内,监测从机就立刻更改信道号,主动上报自己的id号进行绑定请求,监测主机收到绑定信号后,同意绑定请求,存储监测从机的id号,监测从机绑定成功后,系统主机广播未绑定的目标区域的监测从机设备,绑定后的监测从机根据分配的信道进行同步位置数据和通信规则信息,并等待进入离港模式。
[0058]
d.进入离港模式下,主机系统会主动发送模式开启信号,并同时进行最后一次整体同步信息和各个监测点初始状态的锁定。
[0059]
2、集装箱跌落识别的处理算法
[0060]
a.主机系统开启离港模式后,主机系统根据自身的姿态数据,广播给各个监测从机,各个监测从机收到同步命令后,在bd/gps模块的pps脉冲的上升沿开始检测自己的姿态数据(角度和加速度值),并将姿态数据和位置数据(经度和纬度数据)在自己的通信信道上传送给主机,同时记录自己的姿态数据。
[0061]
b.主机收到各个监测从机的数据后,间隔10秒采集各个监测点的相对位置记录和姿态数据记录,并分别与前4次历史数据的进行对比分析,如果相对位置或者姿态数据发生较大偏离时,更改采集频率,提示系统满足报警条件。
[0062]
c.监测从机进行跌落主动报警的触发条件:
[0063]
正常情况下,监测从机在bd/gps模块的pps脉冲的上升沿,采集自身的姿态数据和位置数据,并传送给主机系统。
[0064]
当集装箱发生跌落时,垂直方向的加速度值会瞬间增加,监测从机监测到自身加速度数据超过设定的阈值1.5g时,更改自身的数据采集周期为100ms,多次采集自身的姿态数据和角度数据,根据采集的历史数据进行对比分析,分析方法:将每次采集的数据放到对应数组内,如角度数据放到数组a[n],b[n],加速度数据放到数组x[n],y[n],z[n]中,每次检测到pps脉冲的上升沿,计算加速度数据及角度数据的最大变化量,以及角度的相对初始值变化量,将变化量数据置于新的数组内,当有加速度的最大变化量超过1.5g的阈值且角
度相对变化量超过45
°
的阈值时,进行跌落主动报警。
[0065]
d.丢失报警的触发条件:
[0066]
当主机系统监测到某监测从机主动发送跌落报警时,更改监控主机采集从机数据采集周期为1s,快速采集和分析监测从机的相对位置变化以及相对姿态数据变化;当主机系统识别出监测从机位置坐标数据偏离目标区域的坐标范围,此处设定目标区域中心点经纬度坐标偏离
±
0.0001
°
或者直接产生信号失联时,触发声光报警单元进行丢失报警。
[0067]
3.主备电池自动切换的处理算法
[0068]
在主备电池接入监测从机后,监测从机分别定时采集主备电池的电压,计算出电池的剩余电量,根据主备电池各自的剩余电量来选择使用哪路进行供电,具体的切换算法如下:
[0069]
a.当主电池剩余电量大于等于10%时,当主电池供电线路剩余电量大于备用电池供电线路剩余电量时,选择主电池供电线路进行供电,否则选用备用电池供电线路进行供电;
[0070]
b.当主电池剩余电量小于10%时,分析备用电池供电线路的剩余电量,如果此时备用电池剩余电量大于10%时切换到备用电池供电线路供电,如果备用电池剩余电量也小于
[0071]
10%,则继续使用主电池供电线路,此时立即进行低电量报警,并及时通知主机系统进行电池更换或及时检修操作。
[0072]
实施例2
[0073]
集装箱船出港后,人工切换到出港模式,此时监测主机系统实时监测主机系统和监测从机装置的定位坐标和姿态传感器数据,如果某一时刻船舶遭遇风暴等恶劣天气,船舶发生大幅度摆动,此时某一个监测从机装置与所在集装箱一并发生跌落,则上传的姿态传感器数据出现突变,经过监测主机系统的核心处理器对历史数据进行对比分析后,进一步跟踪,如果主机系统的定位坐标和监测主机装置的中心坐标发生的偏差达到一定阈值,则触发声光报警单元报警,提醒船方紧急处理,船方可以根据触摸显示屏上的位置坐标信息,确定打捞方向,组织人员尽快完成跌落集装箱的打捞工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。