技术特征:
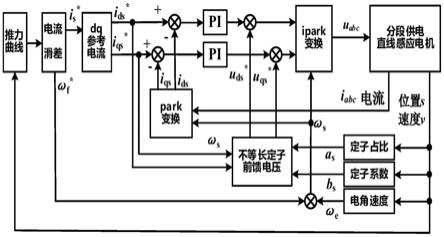
1.一种不等长分段供电直线感应电机控制方法,其特征在于,该控制方法包括:步骤s10,根据不等长分段供电直线感应电机的实际结构,构建定子数学模型的等效电路和动子数学模型的等效电路;步骤s20,基于所述定子数学模型的等效电路构建不等长分段供电直线感应电机的定子数学模型;基于所述动子数学模型的等效电路构建不等长分段供电直线感应电机的动子数学模型;步骤s30,由不等长分段供电直线感应电机的动子位置计算各定子段覆盖动子的占比a
s
、定子段长度系数b
s
和动子长度系数c
s
;步骤s40,基于不等长直线感应电机的定子数学模型和动子数学模型以及各定子段覆盖动子的占比a
s
、定子段长度系数b
s
和动子长度系数c
s
,获取不等长分段供电直线感应电机在稳态工况下的电压和磁链状态方程;步骤s50,基于所述电压和磁链状态方程,获取不等长直线感应电机定子段控制的前馈电压,并通过pi控制器实现电流的反馈闭环控制;步骤s60,将反馈闭环控制的输出参考电压与所述前馈电压相加,通过ipark变换获得三相坐标系的参考电压u
abc
,完成不等长分段供电直线感应电机的推力闭环控制。2.根据权利要求1所述的不等长分段供电直线感应电机控制方法,其特征在于,步骤s30包括:步骤s31,分别计算不等长分段供电直线感应电机的动子进入定子段以及动子离开定子段时的动子覆盖定子占比a
s
;步骤s32,基于当前定子段的长度和最短定子段的长度关系计算定子段长度系数b
s
;步骤s33,基于动子段的长度和最短定子段的长度关系计算动子段长度系数c
s
。3.根据权利要求2所述的不等长分段供电直线感应电机控制方法,其特征在于,所述动子进入定子段以及动子离开定子段时的动子覆盖定子占比a
s
分别为:分别为:其中,代表动子进入定子段时的动子覆盖定子占比,代表动子离开定子段时的动子覆盖定子占比,s代表当前动子尾部距离起始点距离,s
mover
代表动子长度,代表第x段定子尾部的绝对位置,代表第x段定子头部距离起始点的绝对位置,代表第x段定子的长度,n为定子段的数量。4.根据权利要求2所述的不等长分段供电直线感应电机控制方法,其特征在于,所述定子段长度系数b
s
为:
其中,代表第x段定子的长度,s
min
代表最短定子段的长度,n为定子段的数量。5.根据权利要求2所述的不等长分段供电直线感应电机控制方法,其特征在于,所述动子段长度系数c
s
为:其中,s
mover
代表动子长度,s
min
代表最短定子段的长度。6.根据权利要求1所述的不等长分段供电直线感应电机控制方法,其特征在于,所述不等长分段供电直线感应电机在稳态工况下的电压和磁链状态方程为:u
sα
和u
sβ
分别代表定子电压,ψ
sα
、ψ
sβ
、ψ
rα
和ψ
rβ
分别代表定子和动子磁链,i
sα
、i
sβ
、i
rα
和i
rβ
分别代表定子和动子电流,r
s
代表定子电阻,r
r
代表动子电阻,l
ls
代表定子漏感,l
lr
代表动子漏感,l
m
代表互感。7.根据权利要求1所述的不等长分段供电直线感应电机控制方法,其特征在于,所述不等长直线感应电机定子段控制的前馈电压为:其中,代表不等长直线感应电子定子段控制的前馈电压,r
s
代表定子电阻,l
ls
代表定子漏感,l
m
代表互感,代表定子段dq轴的参考电流,ω
s
代表磁场定向角速度。8.根据权利要求7所述的不等长分段供电直线感应电机控制方法,其特征在于,所述磁场定向角速度ω
s
为:其中,代表动子速度为v时的电角速度,τ代表不等长分段直线感应电机的极距,代表控制滑差。9.根据权利要求8所述的不等长分段供电直线感应电机控制方法,其特征在于,所述不等长分段供电直线感应电机,其控制策略采用所述控制滑差以及电流幅值的间接磁场定向,所述控制滑差以及电流幅值其计算方法为:
其中,r
r
代表动子电阻,l
lr
代表动子漏感,l
m
代表互感。10.一种不等长分段供电直线感应电机控制系统,其特征在于,该控制系统包括以下模块:等效电路构建模块,配置为根据不等长分段供电直线感应电机的实际结构,构建定子数学模型的等效电路和动子数学模型的等效电路;数学模型构建模块,配置为基于所述定子数学模型的等效电路构建不等长分段供电直线感应电机的定子数学模型;基于所述动子数学模型的等效电路构建不等长分段供电直线感应电机的动子数学模型;参数计算模块,配置为由不等长分段供电直线感应电机的动子位置计算各定子段覆盖动子的占比a
s
、定子段长度系数b
s
和动子长度系数c
s
;电压和磁链状态方程构建模块,配置为基于不等长直线感应电机的定子数学模型和动子数学模型以及各定子段覆盖动子的占比a
s
、定子段长度系数b
s
和动子长度系数c
s
,获取不等长分段供电直线感应电机在稳态工况下的电压和磁链状态方程;前馈与反馈控制模块,配置为基于所述电压和磁链状态方程,获取不等长直线感应电机定子段控制的前馈电压,并通过pi控制器实现电流的反馈闭环控制;推力闭环控制模块,配置为将反馈闭环控制的输出参考电压与所述前馈电压相加,通过ipark变换获得三相坐标系的参考电压u
abc
,完成不等长分段供电直线感应电机的推力闭环控制。
技术总结
本发明属于电机控制技术领域,具体涉及了一种不等长分段供电直线感应电机控制方法及系统,旨在解决现有技术无法实现不等长分段供电直线感应电机参数变化特征分析和控制的问题。本发明包括:构建定子和动子数学模型的等效电路,并建立子数学模型和动子数学模型;由动子位置计算各定子段覆盖动子的占比、定子段和动子长度系数;构建电机在稳态工况下的电压和磁链状态方程,并获取不等长直线感应电机定子段控制的前馈电压,采用PI控制器实现电流的反馈闭环控制,将前馈电压和反馈输出相加,并经ipark变换得到三相坐标系的参考电压,完成不等长分段供电直线感应电机的推力闭环控制。本发明实现了不等长分段供电直线感应电机的精确、平稳控制。平稳控制。平稳控制。
技术研发人员:徐飞 李耀华 史黎明 李子欣
受保护的技术使用者:中国科学院电工研究所
技术研发日:2021.07.27
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。