1.本发明涉及空化泡图像识别领域,尤其是涉及一种基于图像分析空化泡动力学特性的方法。
背景技术:
2.空化是一种水动力学现象,广泛存在于水利、船舶、化工、医疗和声学等多个领域。所谓空化,即在流动的液体中,由于某种原因局部区域的压力突然下降到低于该区域的液体温度所对应的蒸汽压力时,部分液体蒸发,溶解在液体中的气体逸出,并在液体流中形成空化泡的过程。空化泡随液流进入压力较高的区域时,外界条件的骤然变化使得空化泡溃灭,原空化泡周围的液体运动使局部区域的压力骤增。由于空化泡演变时间非常短,研究空化泡动力学特性往往需要使用高速相机采集大量的图像,通过图像提取空化泡动力学特性相关信息。现有技术中采用人工采集空化泡数据信息,工作量大,工作效率低,技术路线较为复杂,把简单问题复杂化,一次计算只能得到一个空化泡的结果,计算效率低下,需要更多的计算资源。空化泡图像处理方法均不能得到精确的空化泡动力学特性参数。为此我们提出一种基于图像分析空化泡动力学特性的方法及试验方法用于解决上述问题。
3.中国专利文献cn110766707a记载了一种基于多算子融合边缘检测技术的空化泡图像处理方法,获取空化泡在单固壁的环境下由产生到溃灭过程的图像;对所述图像进行多算子融合计算得到空化泡的半径,根据所述半径得到空化泡动态直径变化规律;对所述图像进行直线检测得到空化泡的射流速度,根据所述射流速度得到空化泡动态射流速度变化规律。能够获得更加精确的空化泡边界变化图像,有助于提升空化泡特性研究结果的准确度。但是该方法在对空化泡边缘的识别过程中使用的多种算子,这使得计算效率低下,耗费更多的计算资源和时间成本;各算子的权重受主观判断影响,不同权重方式得到的结果差别巨大,从而影响空化泡变化规律的分析结果。该方法使用腐蚀膨胀检测单固壁,既然是固定着的单固壁,额外增加的计算量显得多此一举,同时也造成了系统误差,使用存在缺陷,需要改进。
技术实现要素:
4.本发明提供了一种基于图像分析空化泡动力学特性的方法,能够耗费较少的计算资源和时间成本得到空化泡动力学特性,得到的结果可重复性好,同时快速、批量、全面的得到空化泡动力学特性。有助于提升空化泡特性研究结果的准确度。
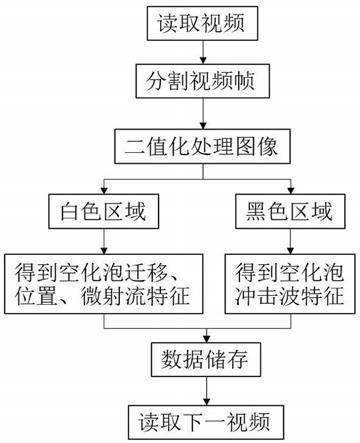
5.为解决上述技术问题,本发明所采用的技术方案是:一种基于图像分析空化泡动力学特性的方法,包括以下步骤:s1、获取空化泡由产生到溃灭过程的视频,对视频进行初步处理,得到单独图像;s2、预设判定阈值x1,二值化处理图像,得到黑白图像;s3、识别图像中白色区域,计算出空化泡微射流的速度、空化泡迁移、位置特征;s4、预设判定阈值x2,二值化处理图像,得到黑白图像;
s5、识别图像中黑色区域,计算出等效半径、冲击波传播距离;s6、存储数据,读取下一组视频。
6.优选方案中,s1中获取空化泡由产生到溃灭过程的图像的步骤是:a1:空化泡在无界域中时,不预定义壁面所在位置;空化泡在壁面附近时,预定义壁面在图像中的像素坐标值;a2:标定单位像素对应的真实尺寸,得到比例关系系数;a3:用电火花、激光或超声的方式诱发产生空化泡,使用高速摄像机拍摄空化泡的演变过程。
7.优选方案中,s1中对图像进行初步处理的方式是:用videoreader函数读取高速摄像机的拍摄视频文件,利用for循环语句将视频文件拆分成每一帧单独的图像,随后利用read函数读取图像。
8.优选方案中,s2中预设判定阈值x1,二值化处理图像的方法是:利用rgb2gra函数将原始图片处理为灰度图,用imbinarize函数将灰度图处理为二值图,用imbinarize函数人为选定一个介于0到1的数值,随后根据计算结果不断优化调试,直到计算机识别结果判定阈值x1能够精准的反映白色区域真实图片情况,确定判定阈值x1。
9.优选方案中,s3中识别白色图像方法是:b1、用imopen函数去除二值图中的噪点;b2、后利用bwlabel函数识别二值图中的白色连通区域的轮廓;b3、利用regionprops函数可以获得二值图中白色区域对应的形心位置、顶端点位置、底端点位置、面积的数据。
10.优选方案中,根据b3中数据,识别图像中的白色区域,计算出空化泡微射流的速度、空化泡迁移、位置特征方法是:c1:利用bwlabel函数,识别每个白色区域边缘像素点y轴数值,根据前后帧的y轴数值差,计算出空化泡微射流的速度,结合每帧时间差,得到空化泡微射流速度随时间的变化过程;c2:利用regionprops函数,识别每个白色区域的形心所在位置和等效半径,提取最大等效半径对应的白色区域,得到空化泡的形心位置和等效半径;c3:前后帧的不同等效半径差值,结合每帧时间差,得到空化泡半径随时间的变化过程,根据前后帧的不同形心所在位置,计算出空化泡的迁移量,进一步,根据预定义的壁面所在位置,与形心所在位置比较,得到空化泡至壁面的相对距离。
11.优选方案中,s4中预设判定阈值x2,二值化处理图像,得到黑白图像方法是,利用imcomplement函数将灰度图中的黑白色调进行反转,图像中冲击波所在位置为黑色区域,用imbinarize函数人为选定一个介于0到1的x2数值,随后根据计算结果不断优化调试,直到计算机识别结果判定阈值x2能够精准的反映白色区域真实图片情况,确定判定阈值x2。
12.优选方案中,s5中用bwlabel函数识别二值图中的黑色连通区域的轮廓,黑色区域拟合为圆形。
13.优选方案中,s5中计算出等效半径、冲击波传播距离的方法是:d1:识别黑色区域拟合圆形的圆心所在位置和等效半径;d2:根据前后帧的不同等效半径差值,结合每帧时间差,得到冲击波传播距离随时
间的变化过程。
14.本发明的有益效果为:能够耗费较少的计算资源和时间成本得到空化泡动力学特性,得到的结果可重复性好,同时快速、批量、全面的得到空化泡动力学特性。有助于提升空化泡特性研究结果的准确度,具有较大的推广价值。
附图说明
15.下面结合附图和实施例对本发明作进一步说明。
16.图1是本发明的流程图;图2是本发明的空化泡形态识别效果图;图3是本发明的微射流速度v随时间t变化过程图;图4是本发明的空化泡半径r随时间t变化过程图;图5是本发明的不同空化泡至壁面的相对距离γ情况下空化泡迁移距离d随时间t变化过程图;图6是本发明的冲击波识别效果图;图7是本发明的冲击波传播距离与时间t的关系图。
具体实施方式
17.实施例1:如图1
‑
7中,一种基于图像分析空化泡动力学特性的方法及试验方法,包括以下步骤:s1、获取空化泡由产生到溃灭过程的视频,对视频进行初步处理,得到单独图像;s2、预设判定阈值x1,二值化处理图像,得到黑白图像;s3、识别图像中白色区域,计算出空化泡微射流的速度、空化泡迁移、位置特征;s4、预设判定阈值x2,二值化处理图像,得到黑白图像;s5、识别图像中黑色区域,计算出等效半径、冲击波传播距离;s6、存储数据,读取下一组视频。
18.优选方案中,s1中获取空化泡由产生到溃灭过程的图像的步骤是:a1:空化泡在无界域中时,不预定义壁面所在位置;空化泡在壁面附近时,预定义壁面在图像中的像素坐标值;a2:标定单位像素对应的真实尺寸,得到比例关系系数;a3:电火花、激光、超声等方式诱发产生空化泡,使用高速摄像机拍摄空化泡的演变过程。
19.实施例2:结合实施例1进一步说明,如图1~5所示,通过videoreader函数读取高速摄像机的拍摄视频文件;利用for循环将视频文件拆分成每一帧单独的图片,随后利用read函数读取图片。对于每一个单独的图片文件,都进行一下操作:利用rgb2gra函数将原始图片处理为灰度图,随后利用imbinarize函数将灰度图处理为二值图,识别图像中白色区域如图2所示。其中关于imbinarize函数的判定阈值x1,首先人为选定一个介于0到1的数值,随后根据计算结果不断优化调试,直到计算机识别结果能够精准的反映真实图片情况。利用imopen函数去除二值图中的噪点,随后利用bwlabel函数识别二值图中的白色连通区域的轮廓,自
此,利用regionprops函数可以获得二值图中白色区域对应的形心位置、顶端点位置、底端点位置、面积、等效半径等众多参数,其中,等效半径为与白色区域面积相等的圆,所对应的半径值。
20.执行完for循环以后,可以根据二值图中白色区域的变化量,来获得空化泡的众多参数信息。将相邻两帧图片中白色区域的底端点纵坐标的变化量除以相邻两帧的时间间隔,可以得到该时间段内的空化泡微射流速度,再将每一帧对应的时间与空化泡微射流速度进行关联,可以得到空化泡微射流速度随时间的变化过程,如图3所示。将每一帧对应的时间与图片中白色区域的等效半径进行关联,可以得到空化泡半径随时间的变化过程,如图4所示。将白色区域形心的纵坐标减去边壁的纵坐标,可以得到空化泡形心至壁面的相对距离,再将每一帧对应的时间与空化泡到壁面的相对距离进行关联,可以得到空化泡形心至壁面的相对距离随时间的变化过程,如图5所示。
21.实施例3:结合实施例1进一步说明,如图1~7所示,识别空化泡溃灭冲击波的操作流程如下:通过videoreader函数读取高速摄像机的拍摄视频文件,利用for循环将视频文件拆分成每一帧单独的图片,随后利用read函数读取图片。对于每一个单独的图片文件,都进行一下操作,利用rgb2gra函数将原始图片处理为灰度图;随后利用imbinarize函数将灰度图处理为二值图,为方便观察,利用imcomplement函数将图像中的黑白色调进行反转,图像中冲击波所在位置为黑色区域,如图6所示。其中关于imbinarize函数的判定阈值x2,首先人为选定一个介于0到1的数值,随后根据计算结果不断优化调试,直到计算机识别结果能够精准的反映真实图片情况,利用imopen函数去除二值图中的噪点,随后利用bwlabel函数识别二值图中的黑色连通区域的轮廓,如图6所示,由此,将黑色区域拟合为圆形,可以得到圆心所在位置和等效半径。
22.执行完for循环以后,可以根据二值图中黑色区域的变化量,来获得空化泡溃灭冲击波的众多参数信息。例如,将每一帧对应的时间与图片中黑色区域的拟合半径进行关联,可以得到冲击波传播距离随时间的变化过程,如图7所示。
23.上述的实施案例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。