1.本发明涉及飞行器分离装置总体设计技术领域,具体地,涉及一种子母弹分离安全性评价方法及系统及子母弹分离仿真平台。
背景技术:
2.子母弹用于对付集群目标,作为大纵深、大面积的压制兵器,已广泛地用于炮弹、航弹、火箭弹和导弹上。子母弹分离气动特性是子母弹研制中的关键技术之一,分离时刻母弹的飞行状态(飞行马赫数、攻角、侧滑角等),以及子弹的抛射速度、排列及抛射方式等,都对子弹群落点分布的形状、抛撒面积大小及其均匀程度存在影响,并进而影响子母弹毁伤目标的效果。
3.采用从尾到头的逆向子母弹高速分离技术时,子弹在弹射器弹射力作用下,沿着与母弹固连的分离装置上的导轨运动,后、中、前三吊挂先后与分离装置上的导轨分离。当后、中吊挂脱离导轨后,仅剩前吊挂在导轨内,此时子弹的运动轨迹和姿态受到母弹的约束和牵连,处于半约束状态,分离动力学模拟困难。其特点是:(1)多学科耦合。空气动力学、飞行力学和多体动力学之间高度耦合。(2)接触非连续。子弹与母弹构成的两体或多体系统之间存在非连续接触(如母体的滑轨与分离体的滑块之间的接触)。(3)变构型变质量。分离过程中子弹与母弹接触时组合系统的外形和质量特性(质心、转动惯量等)存在时变现象。(4)分离瞬时扰动大。母弹与子弹质量比小(相比飞机导弹质量比小一个量级),分离瞬时子弹对母弹存在很大冲击扰动。(5)离轨条件难确定。分离过程中母弹无动力、无驾驶员在回路进行稳定控制,高度、速度和姿态等难以保持,而子弹与母弹做牵连运动,导致子弹的离轨条件散布大,相比飞机投弹存在更大不确定性。因此子母弹高速分离过程非常复杂,具有极大的安全隐患。分离过程中可能会出现后吊挂卡滞、子弹与母弹外包络碰撞、子弹分离后初始扰动过大等问题。为了为子母弹高速分离系统设计提供重要的理论支撑依据,确保子母弹安全分离,需构建子母弹高速分离安全性评价系统及方法对子母弹高速分离过程进行评价。
4.子母弹分离性安全性评价的专利目前没有类似专利可以查询到。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种子母弹分离安全性评价方法及系统及子母弹分离仿真平台。
6.根据本发明提供的一种子母弹分离安全性评价方法,包括:
7.步骤s1:计算子母弹分离各个特征点的气动力系数;
8.步骤s2:根据气动力系数构建子母弹分离变构型气动力响应面模型;
9.步骤s3:构建子母弹分离过程中变构型变质量组合体多体动力学模型;
10.步骤s4:通过多体动力学模型与气动力响应面模型耦合模拟,构建子母弹分离流固耦合动力学模型;
11.步骤s5:对子母弹分离流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹分离过程的安全包络,对子母弹分离安全性进行动态评估,获得最优的子母弹分离初始边界条件。
12.优选地:
13.所述的子母弹分离过程中各个特征点气动力系数,应用计算流体力学软件fluent计算,揭示变构型子母弹组合体的非定常气动特征;
14.所述的子母弹分离时,其周围的流场为三维粘性非定常的湍流流场,湍流流场采用分离涡模拟方法模拟,其控制方程的运输方程形式为:
[0015][0016]
其中,ρ为空气密度,为流场通量,t为时间,div()为散度,u为速度矢量,div(grad())表示梯度的散度,γ为扩散系数,s为源项;
[0017]
所述的分离涡模拟方法,在薄边界层中分离涡模拟使用rans湍流模型,rans为雷诺时均模拟;在非薄边界层区域使用les方法,分离涡模拟方法在不同区域将两种模型各自的优点结合起来,les为大涡模拟方法。
[0018]
优选地,所述步骤s2包括:根据计算获得的气动力系数应用三次样条插值方法构建子母弹分离变构型气动力响应面模型,为子母弹分离流固耦合动力学分析奠定基础;
[0019]
三次样条插值方法具体步骤如下:
[0020]
已知气动力响应面模型s(t)满足插值条件y
i
=f(x
i
,t
i
),i=1,2,3...,n,并且有s(t
i
)=y
i
,i=1,2,...,n及其相应的边界条件为:
[0021]
(1)第一类边界条件:s'(t1)=f1',s'(t
n
)=f'
n
;
[0022]
(2)第二类边界条件:s”(t1)=f
1”,s”(t
n
)=f”n
;
[0023]
y
i
表示第i个插值节点处的插值函数序列值;
[0024]
x
i
表示第i个插值节点处的自变量序列值;
[0025]
t
i
表示第i个插值节点;
[0026]
n表示插值节点i的最大值;
[0027]
s(t
i
)表示第i个插值节点处的气动力序列值;
[0028]
s'(t1)表示第1个插值节点处的一阶导数;
[0029]
f1'表示插值函数第1个插值节点处的一阶导数;
[0030]
s'(t
n
)表示第n个插值节点处的一阶导数;
[0031]
f'
n
表示插值函数第n个插值节点处的一阶导数;
[0032]
s”(t1)表示第1个插值节点处的二阶导数;
[0033]
f
1”表示插值函数第1个插值节点处的二阶导数;
[0034]
s”(t
n
)表示第n个插值节点处的二阶导数;
[0035]
f”n
表示插值函数第n个插值节点处的二阶导数。
[0036]
利用三次样条函数的二阶导数值s”(t
i
)=m
i
,i=1,2,3...,n表达样条函数s(t),由于在区间[t
i
,t
i 1
]上是次数不超过三次的多项式,因此在区间上是线性的,具体表示为
[0037]
[0038]
其中,t
i
为插值节点,h
i
=t
i 1
‑
t
i
;
[0039]
s”(t
i
)表示第i个插值节点处的二阶导数;
[0040]
m
i
表示插值节点t处的二阶导数;
[0041]
s”(t)表示插值节点t处的二阶导数;
[0042]
对上式进行两次积分并利用插值条件,得积分常数,于是得到三次样条函数为:
[0043][0044]
采用第一类边界条件和第二类边界条件求得m
i
,i=1,2,3...,n,由于在区间[t
i
‑1,t
i
]和[t
i
,t
i 1
]上的表达式不同,有要保证在节点t
i
处的光滑性,即t
i
处左右导数相等,s'
i
(t
i
‑
0)=s'
i 1
(t
i
0),s'
i
(t
i
‑
0)表示插值节点i处的一阶左导数,s'
i 1
(t
i
0)表示插值节点i处的一阶右导数;由上述条件得到关于m
i
的三对角方程组,由于方程组的系数矩阵是对角占优矩阵,所以所求方程有唯一解,用追赶法求出m
i
,代入上式即得到所求的三次样条插值函数s(t),即所需的气动力响应面模型。
[0045]
优选地,所述步骤s3包括:
[0046]
考虑非线性气动载荷和非线性非连续接触碰撞的因素,采用牛顿欧拉矢量力学的方法构建分离过程中变构型、变质量组合体多体动力学模型;
[0047]
所述的牛顿欧拉矢量力学的方法建模过程为:以变构型变质量子母弹分离机构中每一个物体为单元,建立固结在刚体上的坐标系,刚体的位置相对于一个公共参考基进行定义,其位置坐标统一为刚体坐标系基点的笛卡尔坐标与坐标系的方位坐标,方位坐标选用欧拉角或欧拉参数;单个物体位置坐标在三维系统中为6个;对于由n个刚体组成的变构型变质量子母弹分离机构,位置坐标阵q中的坐标个数为6n,由于铰约束的存在,这些位置坐标不独立;
[0048]
完整约束条件下变构型变质量子母弹分离的多体动力学微分
‑
代数方程表示为:
[0049][0050]
其中,q、分别为多体系统的广义坐标、广义坐标对时间的一阶倒数、广义坐标对时间的二阶导数,m(q,t)为多体系统的广义质量矩阵,φ(q,t)和φ
q
(q,t)为多体系统的约束函数向量及其对广义坐标q的雅克比矩阵,λ为约束的拉格朗日乘子,为广义外力向量,包含燃气弹射力f
g
、法向接触力f
n
、切向接触力f
t
和气动力的广义力。
[0051]
优选地,所述步骤s4包括:
[0052]
建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空数值仿真平台,为分离安全性研究奠定基础;
[0053]
所述的子母弹分离流固耦合动力学模型的构建基本思路是:利用接口程序连接子母弹分离变构型气动力响应面模型求解器和子母弹分离变构型变质量多体动力学模型求解器,气动力响应面模型求解器实时提供子母弹在当前姿态下的气动载荷,多体动力学模型求解器实时提供子母弹的分离姿态数据,构建多体非连续接触动态分离安全性评估的时空数值仿真平台。
[0054]
优选地,所述步骤s5包括:
[0055]
采用蒙特卡洛方法赋予子母弹分离过程流固耦合动力学模型不同的初始边界条件,利用构建的时空数值仿真平台中的接口程序进行仿真计算;接口程序将当前气动载荷传递给考虑非线性非连续接触的多体动力学模型求解器,多体动力学模型求解器计算出当前气动载荷作用下子母弹的姿态数据;接口程序再将子母弹姿态数据传递给气动力响应面模型求解器用于子母弹气动力计算;如此反复迭代完成子母弹分离过程的流固耦合仿真计算;
[0056]
评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞、子弹分离后的姿态角和姿态角速度是否满足控制系统要求。
[0057]
根据本发明提供的一种子母弹分离安全性评价系统,包括:
[0058]
模块m1:计算子母弹分离各个特征点的气动力系数;
[0059]
模块m2:根据气动力系数构建子母弹分离变构型气动力响应面模型;
[0060]
模块m3:构建子母弹分离过程中变构型变质量组合体多体动力学模型;
[0061]
模块m4:通过多体动力学模型与气动力响应面模型耦合模拟,构建子母弹分离流固耦合动力学模型;
[0062]
模块m5:对子母弹分离流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹分离过程的安全包络,对子母弹分离安全性进行动态评估,获得最优的子母弹分离初始边界条件。
[0063]
优选地,所述的子母弹分离过程中各个特征点气动力系数,应用计算流体力学软件fluent计算,揭示变构型子母弹组合体的非定常气动特征;
[0064]
所述的子母弹分离时,其周围的流场为三维粘性非定常的湍流流场,湍流流场采用分离涡模拟方法模拟,其控制方程的运输方程形式为:
[0065][0066]
其中,ρ为空气密度,为流场通量,t为时间,div()为散度,u为速度矢量,div(grad())表示梯度的散度,γ为扩散系数,s为源项;
[0067]
所述的分离涡模拟方法,在薄边界层中分离涡模拟使用rans湍流模型,rans为雷诺时均模拟;在非薄边界层区域使用les方法,分离涡模拟方法在不同区域将两种模型各自的优点结合起来,les为大涡模拟方法。
[0068]
优选地,所述模块m2包括:
[0069]
根据计算获得的气动力系数应用三次样条插值方法构建子母弹分离变构型气动力响应面模型,为子母弹分离流固耦合动力学分析奠定基础;
[0070]
三次样条插值方法具体步骤如下:
[0071]
已知气动力响应面模型s(t)满足插值条件y
i
=f(x
i
,t
i
),i=1,2,3...,n,并且有s(t
i
)=y
i
,i=1,2,...,n及其相应的边界条件为:
[0072]
(1)第一类边界条件:s'(t1)=f1',s'(t
n
)=f'
n
;
[0073]
(2)第二类边界条件:s”(t1)=f
1”,s”(t
n
)=f”n
;
[0074]
y
i
表示第i个插值节点处的插值函数序列值;
[0075]
x
i
表示第i个插值节点处的自变量序列值;
[0076]
t
i
表示第i个插值节点;
[0077]
n表示插值节点i的最大值;
[0078]
s(t
i
)表示第i个插值节点处的气动力序列值;
[0079]
s'(t1)表示第1个插值节点处的一阶导数;
[0080]
f1'表示插值函数第1个插值节点处的一阶导数;
[0081]
s'(t
n
)表示第n个插值节点处的一阶导数;
[0082]
f'
n
表示插值函数第n个插值节点处的一阶导数;
[0083]
s”(t1)表示第1个插值节点处的二阶导数;
[0084]
f
1”表示插值函数第1个插值节点处的二阶导数;
[0085]
s”(t
n
)表示第n个插值节点处的二阶导数;
[0086]
f”n
表示插值函数第n个插值节点处的二阶导数。
[0087]
利用三次样条函数的二阶导数值s”(t
i
)=m
i
,i=1,2,3...,n表达样条函数s(t),由于在区间[t
i
,t
i 1
]上是次数不超过三次的多项式,因此在区间上是线性的,具体表示为
[0088][0089]
其中,t
i
为插值节点,h
i
=t
i 1
‑
t
i
;
[0090]
s”(t
i
)表示第i个插值节点处的二阶导数;
[0091]
m
i
表示插值节点t处的二阶导数;
[0092]
s”(t)表示插值节点t处的二阶导数;
[0093]
对上式进行两次积分并利用插值条件,得积分常数,于是得到三次样条函数为:
[0094][0095]
采用第一类边界条件和第二类边界条件求得m
i
,i=1,2,3...,n,由于在区间[t
i
‑1,t
i
]和[t
i
,t
i 1
]上的表达式不同,有要保证在节点t
i
处的光滑性,即t
i
处左右导数相等,s'
i
(t
i
‑
0)=s'
i 1
(t
i
0),s'
i
(t
i
‑
0)表示插值节点i处的一阶左导数,s'
i 1
(t
i
0)表示插值节点i处的一阶右导数;由上述条件得到关于m
i
的三对角方程组,由于方程组的系数矩阵是对角占优矩阵,所以所求方程有唯一解,用追赶法求出m
i
,代入上式即得到所求的三次样条插值函数s(t),即所需的气动力响应面模型;
[0096]
优选地,在所述模块m3中::
[0097]
考虑非线性气动载荷和非线性非连续接触碰撞的因素,采用牛顿欧拉矢量力学的方法构建分离过程中变构型、变质量组合体多体动力学模型;
[0098]
所述的牛顿欧拉矢量力学的方法建模过程为:以变构型变质量子母弹分离机构中每一个物体为单元,建立固结在刚体上的坐标系,刚体的位置相对于一个公共参考基进行定义,其位置坐标统一为刚体坐标系基点的笛卡尔坐标与坐标系的方位坐标,方位坐标选用欧拉角或欧拉参数;单个物体位置坐标在三维系统中为6个;对于由n个刚体组成的变构型变质量子母弹分离机构,位置坐标阵q中的坐标个数为6n,由于铰约束的存在,这些位置坐标不独立;
[0099]
完整约束条件下变构型变质量子母弹分离的多体动力学微分
‑
代数方程表示为:
[0100][0101]
其中,q、分别为多体系统的广义坐标、广义坐标对时间的一阶倒数、广义坐标对时间的二阶导数,m(q,t)为多体系统的广义质量矩阵,φ(q,t)和φ
q
(q,t)为多体系统的约束函数向量及其对广义坐标q的雅克比矩阵,λ为约束的拉格朗日乘子,为广义外力向量,包含燃气弹射力f
g
、法向接触力f
n
、切向接触力f
t
和气动力的广义力;
[0102]
优选地,在所述模块m4中:
[0103]
建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空数值仿真平台,为分离安全性研究奠定基础;
[0104]
所述的子母弹分离流固耦合动力学模型的构建基本思路是:利用接口程序连接子母弹分离变构型气动力响应面模型求解器和子母弹分离变构型变质量多体动力学模型求解器,气动力响应面模型求解器实时提供子母弹在当前姿态下的气动载荷,多体动力学模型求解器实时提供子母弹的分离姿态数据,构建多体非连续接触动态分离安全性评估的时空数值仿真平台;
[0105]
优选地,在所述模块m5中:
[0106]
采用蒙特卡洛方法赋予子母弹分离过程流固耦合动力学模型不同的初始边界条件,利用构建的时空数值仿真平台中的接口程序进行仿真计算;接口程序将当前气动载荷传递给考虑非线性非连续接触的多体动力学模型求解器,多体动力学模型求解器计算出当前气动载荷作用下子母弹的姿态数据;接口程序再将子母弹姿态数据传递给气动力响应面模型求解器用于子母弹气动力计算;如此反复迭代完成子母弹分离过程的流固耦合仿真计算;
[0107]
评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞、子弹分离后的姿态角和姿态角速度是否满足控制系统要求。
[0108]
根据本发明提供的一种子母弹分离仿真平台,采用所述的子母弹分离安全性评价方法,或者所述的子母弹分离安全性评价系统,对子母弹高速分离进行仿真,得到安全性的仿真结果并展示给用户。
[0109]
与现有技术相比,本发明具有如下的有益效果:
[0110]
1、本发明解决了本领域对子母弹高速分离安全性评价和过程控制的技术难题;
[0111]
2、本发明为制定有利于提高子母弹高速分离安全性的技术措施提供量化的设计依据;
[0112]
3、本发明可为子母弹高速分离安全性设计提供理论依据,具有重要的工程价值。
附图说明
[0113]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0114]
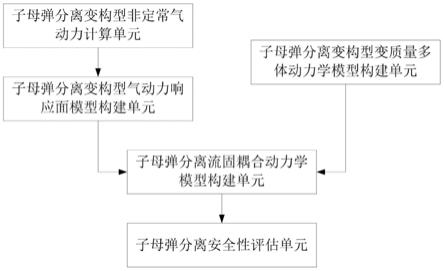
图1为本发明的子母弹高速分离安全性评价系统组成图;
[0115]
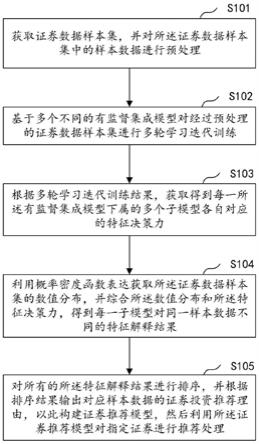
图2为本发明的子母弹高速分离安全性评价方法步骤图;
[0116]
图3为本发明实施例中在matlab/simulink中封装好的三次样条插值子弹气动力响应面模型;
[0117]
图4为本发明实施例中在matlab/simulink中封装好的三次样条插值母弹气动力响应面模型;
[0118]
图5为本发明实施例中在matlab/simulink中封装好的子母弹高速分离变构型变质量多体动力学模型图;
[0119]
图6为本发明实施例中在matlab/simulink中封装好的子母弹高速分离流固耦合模型;
[0120]
图7为本发明实施例中的子母弹高速分离流固耦合仿真模型的输入输出关系;
[0121]
图8为本发明实施例中的气动力插值模型和子母弹高速分离多体动力学模型间实时耦合计算过程图。
[0122]
图9为本发明实施例中的多工况子母弹高速分离过程子弹俯仰角速度、偏航角速度和滚转角速度曲线。
[0123]
图中:
[0124]
pitch angular velocity为俯仰角速度;
[0125]
yaw angular velocity为偏航角速度;
[0126]
roll angular velocity为滚转角速度。
具体实施方式
[0127]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0128]
实施例1
[0129]
根据本发明提供的一种子母弹分离安全性评价方法,包括:
[0130]
步骤s1:计算子母弹分离各个特征点的气动力系数;
[0131]
步骤s2:根据气动力系数构建子母弹分离变构型气动力响应面模型;
[0132]
步骤s3:构建子母弹分离过程中变构型变质量组合体多体动力学模型;
[0133]
步骤s4:通过多体动力学模型与气动力响应面模型耦合模拟,构建子母弹分离流固耦合动力学模型;
[0134]
步骤s5:对子母弹分离流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹分离过程的安全包络,对子母弹分离安全性进行动态评估,获得最优的子母弹分离初始边界条件。
[0135]
具体地:
[0136]
所述的子母弹分离过程中各个特征点气动力系数,应用计算流体力学软件fluent计算,揭示变构型子母弹组合体的非定常气动特征;
[0137]
所述的子母弹分离时,其周围的流场为三维粘性非定常的湍流流场,湍流流场采用分离涡模拟方法模拟,其控制方程的运输方程形式为:
[0138][0139]
其中,ρ为空气密度,为流场通量,t为时间,div()为散度,u为速度矢量,div(grad())表示梯度的散度,γ为扩散系数,s为源项;
[0140]
所述的分离涡模拟方法,在薄边界层中分离涡模拟使用rans湍流模型,rans为雷诺时均模拟;在非薄边界层区域使用les方法,分离涡模拟方法在不同区域将两种模型各自的优点结合起来,les为大涡模拟方法。
[0141]
具体地,所述步骤s2包括:根据计算获得的气动力系数应用三次样条插值方法构建子母弹分离变构型气动力响应面模型,为子母弹分离流固耦合动力学分析奠定基础;
[0142]
三次样条插值方法具体步骤如下:
[0143]
已知气动力响应面模型s(t)满足插值条件y
i
=f(x
i
,t
i
),i=1,2,3...,n,并且有s(t
i
)=y
i
,i=1,2,...,n及其相应的边界条件为:
[0144]
(1)第一类边界条件:s'(t1)=f1',s'(t
n
)=f'
n
;
[0145]
(2)第二类边界条件:s”(t1)=f
1”,s”(t
n
)=f”n
;
[0146]
y
i
表示第i个插值节点处的插值函数序列值;
[0147]
x
i
表示第i个插值节点处的自变量序列值;
[0148]
t
i
表示第i个插值节点;
[0149]
n表示插值节点i的最大值;
[0150]
s(t
i
)表示第i个插值节点处的气动力序列值;
[0151]
s'(t1)表示第1个插值节点处的一阶导数;
[0152]
f1'表示插值函数第1个插值节点处的一阶导数;
[0153]
s'(t
n
)表示第n个插值节点处的一阶导数;
[0154]
f'
n
表示插值函数第n个插值节点处的一阶导数;
[0155]
s”(t1)表示第1个插值节点处的二阶导数;
[0156]
f
1”表示插值函数第1个插值节点处的二阶导数;
[0157]
s”(t
n
)表示第n个插值节点处的二阶导数;
[0158]
f”n
表示插值函数第n个插值节点处的二阶导数。
[0159]
利用三次样条函数的二阶导数值s”(t
i
)=m
i
,i=1,2,3...,n表达样条函数s(t),由于在区间[t
i
,t
i 1
]上是次数不超过三次的多项式,因此在区间上是线性的,具体表示为
[0160][0161]
其中,t
i
为插值节点,h
i
=t
i 1
‑
t
i
;
[0162]
s”(t
i
)表示第i个插值节点处的二阶导数;
[0163]
m
i
表示插值节点t处的二阶导数;
[0164]
s”(t)表示插值节点t处的二阶导数;
[0165]
对上式进行两次积分并利用插值条件,得积分常数,于是得到三次样条函数为:
[0166]
[0167]
采用第一类边界条件和第二类边界条件求得m
i
,i=1,2,3...,n,由于在区间[t
i
‑1,t
i
]和[t
i
,t
i 1
]上的表达式不同,有要保证在节点t
i
处的光滑性,即t
i
处左右导数相等,s'
i
(t
i
‑
0)=s'
i 1
(t
i
0),s'
i
(t
i
‑
0)表示插值节点i处的一阶左导数,s'
i 1
(t
i
0)表示插值节点i处的一阶右导数;由上述条件得到关于m
i
的三对角方程组,由于方程组的系数矩阵是对角占优矩阵,所以所求方程有唯一解,用追赶法求出m
i
,代入上式即得到所求的三次样条插值函数s(t),即所需的气动力响应面模型。
[0168]
具体地,所述步骤s3包括:
[0169]
考虑非线性气动载荷和非线性非连续接触碰撞的因素,采用牛顿欧拉矢量力学的方法构建分离过程中变构型、变质量组合体多体动力学模型;
[0170]
所述的牛顿欧拉矢量力学的方法建模过程为:以变构型变质量子母弹分离机构中每一个物体为单元,建立固结在刚体上的坐标系,刚体的位置相对于一个公共参考基进行定义,其位置坐标统一为刚体坐标系基点的笛卡尔坐标与坐标系的方位坐标,方位坐标选用欧拉角或欧拉参数;单个物体位置坐标在三维系统中为6个;对于由n个刚体组成的变构型变质量子母弹分离机构,位置坐标阵q中的坐标个数为6n,由于铰约束的存在,这些位置坐标不独立;
[0171]
完整约束条件下变构型变质量子母弹分离的多体动力学微分
‑
代数方程表示为:
[0172][0173]
其中,q、分别为多体系统的广义坐标、广义坐标对时间的一阶倒数、广义坐标对时间的二阶导数,m(q,t)为多体系统的广义质量矩阵,φ(q,t)和φ
q
(q,t)为多体系统的约束函数向量及其对广义坐标q的雅克比矩阵,λ为约束的拉格朗日乘子,为广义外力向量,包含燃气弹射力f
g
、法向接触力f
n
、切向接触力f
t
和气动力的广义力。
[0174]
具体地,所述步骤s4包括:
[0175]
建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空数值仿真平台,为分离安全性研究奠定基础;
[0176]
所述的子母弹分离流固耦合动力学模型的构建基本思路是:利用接口程序连接子母弹分离变构型气动力响应面模型求解器和子母弹分离变构型变质量多体动力学模型求解器,气动力响应面模型求解器实时提供子母弹在当前姿态下的气动载荷,多体动力学模型求解器实时提供子母弹的分离姿态数据,构建多体非连续接触动态分离安全性评估的时空数值仿真平台。
[0177]
具体地,所述步骤s5包括:
[0178]
采用蒙特卡洛方法赋予子母弹分离过程流固耦合动力学模型不同的初始边界条件,利用构建的时空数值仿真平台中的接口程序进行仿真计算;接口程序将当前气动载荷传递给考虑非线性非连续接触的多体动力学模型求解器,多体动力学模型求解器计算出当前气动载荷作用下子母弹的姿态数据;接口程序再将子母弹姿态数据传递给气动力响应面模型求解器用于子母弹气动力计算;如此反复迭代完成子母弹分离过程的流固耦合仿真计算;
[0179]
评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞、子弹分离后的姿态角和姿态角速度是否满足控制系统要求。
[0180]
根据本发明提供的一种子母弹分离安全性评价系统,其特征在于,包括:
[0181]
模块m1:计算子母弹分离各个特征点的气动力系数;
[0182]
模块m2:根据气动力系数构建子母弹分离变构型气动力响应面模型;
[0183]
模块m3:构建子母弹分离过程中变构型变质量组合体多体动力学模型;
[0184]
模块m4:通过多体动力学模型与气动力响应面模型耦合模拟,构建子母弹分离流固耦合动力学模型;
[0185]
模块m5:对子母弹分离流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹分离过程的安全包络,对子母弹分离安全性进行动态评估,获得最优的子母弹分离初始边界条件。
[0186]
具体地,所述的子母弹分离过程中各个特征点气动力系数,应用计算流体力学软件fluent计算,揭示变构型子母弹组合体的非定常气动特征;
[0187]
所述的子母弹分离时,其周围的流场为三维粘性非定常的湍流流场,湍流流场采用分离涡模拟方法模拟,其控制方程的运输方程形式为:
[0188][0189]
其中,ρ为空气密度,为流场通量,t为时间,div()为散度,u为速度矢量,div(grad())表示梯度的散度,γ为扩散系数,s为源项;
[0190]
所述的分离涡模拟方法,在薄边界层中分离涡模拟使用rans湍流模型,rans为雷诺时均模拟;在非薄边界层区域使用les方法,分离涡模拟方法在不同区域将两种模型各自的优点结合起来,les为大涡模拟方法。
[0191]
具体地,所述模块m2包括:
[0192]
根据计算获得的气动力系数应用三次样条插值方法构建子母弹分离变构型气动力响应面模型,为子母弹分离流固耦合动力学分析奠定基础;
[0193]
三次样条插值方法具体步骤如下:
[0194]
已知气动力响应面模型s(t)满足插值条件y
i
=f(x
i
,t
i
),i=1,2,3...,n,并且有s(t
i
)=y
i
,i=1,2,...,n及其相应的边界条件为:
[0195]
(1)第一类边界条件:s'(t1)=f1',s'(t
n
)=f'
n
;
[0196]
(2)第二类边界条件:s”(t1)=f
1”,s”(t
n
)=f”n
;
[0197]
y
i
表示第i个插值节点处的插值函数序列值;
[0198]
x
i
表示第i个插值节点处的自变量序列值;
[0199]
t
i
表示第i个插值节点;
[0200]
n表示插值节点i的最大值;
[0201]
s(t
i
)表示第i个插值节点处的气动力序列值;
[0202]
s'(t1)表示第1个插值节点处的一阶导数;
[0203]
f1'表示插值函数第1个插值节点处的一阶导数;
[0204]
s'(t
n
)表示第n个插值节点处的一阶导数;
[0205]
f'
n
表示插值函数第n个插值节点处的一阶导数;
[0206]
s”(t1)表示第1个插值节点处的二阶导数;
[0207]
f
1”表示插值函数第1个插值节点处的二阶导数;
[0208]
s”(t
n
)表示第n个插值节点处的二阶导数;
[0209]
f”n
表示插值函数第n个插值节点处的二阶导数。
[0210]
利用三次样条函数的二阶导数值s”(t
i
)=m
i
,i=1,2,3...,n表达样条函数s(t),由于在区间[t
i
,t
i 1
]上是次数不超过三次的多项式,因此在区间上是线性的,具体表示为
[0211][0212]
其中,t
i
为插值节点,h
i
=t
i 1
‑
t
i
;
[0213]
s”(t
i
)表示第i个插值节点处的二阶导数;
[0214]
m
i
表示插值节点t处的二阶导数;
[0215]
s”(t)表示插值节点t处的二阶导数;
[0216]
对上式进行两次积分并利用插值条件,得积分常数,于是得到三次样条函数为:
[0217][0218]
采用第一类边界条件和第二类边界条件求得m
i
,i=1,2,3...,n,由于在区间[t
i
‑1,t
i
]和[t
i
,t
i 1
]上的表达式不同,有要保证在节点t
i
处的光滑性,即t
i
处左右导数相等,s'
i
(t
i
‑
0)=s'
i 1
(t
i
0),s'
i
(t
i
‑
0)表示插值节点i处的一阶左导数,s'
i 1
(t
i
0)表示插值节点i处的一阶右导数;由上述条件得到关于m
i
的三对角方程组,由于方程组的系数矩阵是对角占优矩阵,所以所求方程有唯一解,用追赶法求出m
i
,代入上式即得到所求的三次样条插值函数s(t),即所需的气动力响应面模型;
[0219]
具体地,在所述模块m3中::
[0220]
考虑非线性气动载荷和非线性非连续接触碰撞的因素,采用牛顿欧拉矢量力学的方法构建分离过程中变构型、变质量组合体多体动力学模型;
[0221]
所述的牛顿欧拉矢量力学的方法建模过程为:以变构型变质量子母弹分离机构中每一个物体为单元,建立固结在刚体上的坐标系,刚体的位置相对于一个公共参考基进行定义,其位置坐标统一为刚体坐标系基点的笛卡尔坐标与坐标系的方位坐标,方位坐标选用欧拉角或欧拉参数;单个物体位置坐标在三维系统中为6个;对于由n个刚体组成的变构型变质量子母弹分离机构,位置坐标阵q中的坐标个数为6n,由于铰约束的存在,这些位置坐标不独立;
[0222]
完整约束条件下变构型变质量子母弹分离的多体动力学微分
‑
代数方程表示为:
[0223][0224]
其中,q、分别为多体系统的广义坐标、广义坐标对时间的一阶倒数、广义坐标对时间的二阶导数,m(q,t)为多体系统的广义质量矩阵,φ(q,t)和φ
q
(q,t)为多体系统的约束函数向量及其对广义坐标q的雅克比矩阵,λ为约束的拉格朗日乘子,为广义外力向量,包含燃气弹射力f
g
、法向接触力f
n
、切向接触力f
t
和气动力的广义力;
[0225]
具体地,在所述模块m4中:
[0226]
建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空数值仿真平台,为分离安全性研究奠定基础;
[0227]
所述的子母弹分离流固耦合动力学模型的构建基本思路是:利用接口程序连接子母弹分离变构型气动力响应面模型求解器和子母弹分离变构型变质量多体动力学模型求解器,气动力响应面模型求解器实时提供子母弹在当前姿态下的气动载荷,多体动力学模型求解器实时提供子母弹的分离姿态数据,构建多体非连续接触动态分离安全性评估的时空数值仿真平台;
[0228]
具体地,在所述模块m5中:
[0229]
采用蒙特卡洛方法赋予子母弹分离过程流固耦合动力学模型不同的初始边界条件,利用构建的时空数值仿真平台中的接口程序进行仿真计算;接口程序将当前气动载荷传递给考虑非线性非连续接触的多体动力学模型求解器,多体动力学模型求解器计算出当前气动载荷作用下子母弹的姿态数据;接口程序再将子母弹姿态数据传递给气动力响应面模型求解器用于子母弹气动力计算;如此反复迭代完成子母弹分离过程的流固耦合仿真计算;
[0230]
评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞、子弹分离后的姿态角和姿态角速度是否满足控制系统要求。
[0231]
根据本发明提供的一种子母弹分离仿真平台,采用权利要求1至6中任一项所述的子母弹分离安全性评价方法,或者权利要求7至9中任一项所述的子母弹分离安全性评价系统,对子母弹高速分离进行仿真,得到安全性的仿真结果并展示给用户。
[0232]
实施例2
[0233]
本领域技术人员可以将本实施例理解为实施例1的优选例。
[0234]
本发明首先通过建立子母弹高速分离变构型非定常气动力模型并通过计算获得子母弹高速分离过程中的子弹和母弹上的气动力数据;其次,采用三次样条插值方法构建子母弹高速分离变构型气动力插值响应面模型;第三,采用牛顿
‑
欧拉方法构建子母弹高速分离变构型变质量多体动力学模型;第四,综合变构型气动力插值响应面模型和变构型变质量多体动力学模型构建子母弹高速分离过程流固耦合动力学模型;第五,采用蒙特卡洛方法赋予子母弹高速分离过程流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹高速分离过程的安全包络,对子母弹高速分离安全性进行动态评估,最终获得最优的子母弹高速分离初始边界条件。
[0235]
如图1所示,本发明实施例提供了一种子母弹高速分离安全性评价系统,包括子母弹高速分离变构型非定常气动力计算单元、子母弹高速分离变构型气动力响应面模型构建单元、子母弹高速分离变构型变质量多体动力学模型构建单元、子母弹高速分离流固耦合动力学模型构建单元和子母弹高速分离安全性评估单元。
[0236]
所述子母弹高速分离变构型非定常气动力计算单元应用计算流体力学软件计算子母弹高速分离各个特征点的气动力系数,揭示变构型子母弹组合体的非定常气动特征;
[0237]
所述子母弹高速分离变构型气动力响应面模型构建单元根据计算获得的气动力系数应用三次样条插值方法构建子母弹高速分离变构型气动力响应面模型,为子母弹高速分离流固耦合动力学分析奠定基础;
[0238]
所述子母弹高速分离变构型变质量多体动力学模型构建单元考虑非线性高精度气动载荷和非线性非连续接触碰撞等因素,构建分离过程中变构型、变质量组合体多体动力学模型,解决后退式分离过程中复杂牵连运动问题,准确表征小质量比母弹和子弹非连续接触变构型变质量后退拔出过程。
[0239]
所述子母弹高速分离流固耦合动力学模型构建单元建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空高精度数值仿真平台,为分离安全性研究奠定基础。
[0240]
所述子母弹高速分离安全性评估单元采用蒙特卡洛方法赋予子母弹高速分离过程流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹高速分离过程的安全包络,对子母弹高速分离安全性进行动态评估,最终获得最优的子母弹高速分离初始边界条件。评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞;子弹分离后的姿态角和姿态角速度是否满足控制系统要求等。
[0241]
如图2所示,本发明还提供了一种对子母弹高速分离过程进行安全性评价的方法,其包括以下步骤:
[0242]
s1、子母弹高速分离变构型非定常气动力计算:应用计算流体力学软件计算子母弹高速分离各个特征点的气动力系数,揭示变构型子母弹组合体的非定常气动特征;
[0243]
s2、子母弹高速分离变构型气动力响应面模型构建:根据计算获得的气动力系数应用三次样条插值方法构建子母弹高速分离变构型气动力响应面模型,为子母弹高速分离流固耦合动力学分析奠定基础;
[0244]
s3、子母弹高速分离变构型变质量多体动力学模型构建:考虑非线性高精度气动载荷和非线性非连续接触碰撞等因素,构建分离过程中变构型、变质量组合体多体动力学模型,解决后退式分离过程中复杂牵连运动问题,准确表征小质量比母弹和子弹非连续接触变构型变质量后退拔出过程;
[0245]
s4、子母弹高速分离流固耦合动力学模型构建;建立含非连续接触碰撞的多体动力学模型与气动力响应面模型耦合模拟方法,构建多体非连续接触动态分离安全性评估的时空高精度数值仿真平台,为分离安全性研究奠定基础;
[0246]
s5,子母弹高速分离安全性评估:采用蒙特卡洛方法赋予子母弹高速分离过程流固耦合动力学模型不同的初始边界条件进行仿真计算,获得子母弹高速分离过程的安全包络,对子母弹高速分离安全性进行动态评估,最终获得最优的子母弹高速分离初始边界条件。评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞;子弹分离后的姿态角和姿态角速度是否满足控制系统要求等。
[0247]
下面结合图2以及具体实施例对本发明的方法的工作流程做进一步解释:
[0248]
子母弹高速分离过程中各个特征点气动力系数采用计算流体力学软件fluent来计算获得。
[0249]
子母弹高速分离时,其周围的流场为三维粘性非定常的湍流流场,其控制方程的运输方程形式为:
[0250][0251]
其中,t为时间,ρ为空气密度,u为速度矢量,为流场通量,γ为扩散系数,s为源
项。
[0252]
子母弹高速分离时湍流流场采用分离涡模拟(detached
‑
eddy simulation,des)方法模拟。
[0253]
分离涡模拟(detached
‑
eddy simulation,des)方法,能够捕捉到丰富的流动现象和非定常特性。在薄边界层中,des使用rans湍流模型;而在其它区域,使用les方法。des方法在不同区域将两种模型各自的优点结合起来。
[0254]
子母弹高速分离变构型气动力响应面模型采用三次样条插值方法实现,具体的,
[0255]
已知气动力响应面模型s(t)满足插值条件y
i
=f(x
i
,t
i
),(i=1,2,3...,n)并且有s(t
i
)=y
i
,i=1,2,...,n及其相应的边界条件为:(1)第一类边界条件:s'(t1)=f1',s'(t
n
)=f'
n
;(2)第二类边界条件:s”(t1)=f
1”,s”(t
n
)=f”n
。利用三次样条函数的二阶导数值s”(t
i
)=m
i
,i=1,2,3...,n表达样条函数s(t),由于在区间[t
i
,t
i 1
]上是次数不超过三次的多项式,可知在区间上是线性的,具体表示为
[0256][0257]
对上式进行两次积分并利用插值条件,可得积分常数。于是得到三次样条函数为:
[0258][0259]
采用第一类边界条件和第二类边界条件求得m
i
(i=1,2,3...,n)。由于在区间[t
i
‑1,t
i
]和[t
i
,t
i 1
]上的表达式不同,有要保证在节点t
i
处的光滑性,即t
i
处左右导数相等,可知s'
i
(t
i
‑
0)=s'
i 1
(t
i
0)。由上述条件可得关于m
i
的三对角方程组,由于方程组的系数矩阵是对角占优矩阵,所以所求方程有唯一解,可用追赶法求出m
i
,代入上式即得到所求的三次样条插值函数s(t),即所需的气动力响应面模型,图3为本发明实施例中在matlab/simulink中封装好的三次样条插值子弹气动力响应面模型;图4为本发明实施例中在matlab/simulink中封装好的三次样条插值母弹气动力响应面模型。
[0260]
子母弹高速分离变构型变质量多体动力学模型采用牛顿
‑
欧拉矢量力学的方法来构建。图5为本发明实施例中在matlab/simulink中封装好的子母弹高速分离变构型变质量多体动力学模型图。牛顿
‑
欧拉矢量力学的方法建模过程为:以变构型变质量子母弹分离机构中每一个物体为单元,建立固结在刚体上的坐标系,刚体的位置相对于一个公共参考基进行定义,其位置坐标(也可称为广义坐标)统一为刚体坐标系基点的笛卡尔坐标与坐标系的方位坐标,方位坐标可以选用欧拉角或欧拉参数。单个物体位置坐标在三维系统中为6个。对于由n个刚体组成的变构型变质量子母弹分离机构,位置坐标阵q中的坐标个数为6n,由于铰约束的存在,这些位置坐标不独立。
[0261]
完整约束条件下变构型变质量子母弹分离的多体动力学微分
‑
代数方程可表示为:
[0262][0263]
其中,q、和分别为多体系统的广义坐标及其广义坐标对时间的一阶、二阶导数,m(q,t)为多体系统的广义质量矩阵,φ(q,t)和φ
q
(q,t)为多体系统的约束函数向量及其
对广义坐标q的雅克比矩阵,λ为约束的拉格朗日乘子,为广义外力向量,包含燃气弹射力f
g
、法向接触力f
n
、切向接触力f
t
和气动力的广义力。
[0264]
子母弹高速分离流固耦合动力学模型的构建基本思路是:利用接口程序联接子母弹高速分离变构型气动力响应面模型求解器和子母弹高速分离变构型变质量多体动力学模型求解器,气动力响应面模型求解器实时提供子母弹在当前姿态下的气动载荷,多体动力学模型求解器实时提供子母弹的分离姿态数据,构建多体非连续接触动态分离安全性评估的时空高精度数值仿真平台。图6为本发明实施例中在matlab/simulink中封装好的子母弹高速分离流固耦合模型;图7为本发明实施例中的子母弹高速分离流固耦合仿真模型的输入输出关系。
[0265]
子母弹高速分离安全性评估基本过程为:采用蒙特卡洛方法赋予子母弹高速分离过程流固耦合动力学模型不同的初始边界条件,利用所构建的时空高精度数值仿真平台中的接口程序进行子母弹高速分离流固耦合仿真计算。
[0266]
子母弹高速分离流固耦合仿真计算过程为:接口程序将当前气动载荷传递给考虑非线性非连续接触的多体动力学模型求解器,多体动力学模型求解器计算出当前气动载荷作用下子母弹的姿态等数据;接口程序再将子母弹姿态等数据传递给气动力响应面模型求解器用于子母弹气动力计算;如此反复迭代完成子母弹分离过程的流固耦合仿真计算。图8为本发明实施例中的气动力插值模型和子母弹高速分离多体动力学模型间实时耦合计算过程图。
[0267]
子母弹高速分离流固耦合仿真计算结果将获得子母弹高速分离过程的安全包络,对子母弹高速分离安全性进行动态评估,最终获得最优的子母弹高速分离初始边界条件。评估内容包含分离过程中是否会发生卡滞、子弹与母弹外包络是否发生碰撞;子弹分离后的姿态角和姿态角速度是否满足控制系统要求等。图9为本发明实施例中的多工况子母弹高速分离过程子弹俯仰角速度、偏航角速度和滚转角速度曲线,可根据该仿真结果判断子弹的分离角速度是否满足控制系统的起控要求。
[0268]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0269]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。