1.本发明属于电力工程施工领域,具体涉及一种用于三维划定空间区域的报警定位系统技术。
背景技术:
2.当前,施工现场人工操作机械设备进行基槽的开挖、重物起吊,叉车搬运等各种作业,由于各种地形条件、管线埋设,以及危险物品等存在,受限于一定区域内作业,超过划定区域即为危险状态或行为。
3.传统的报警定位系统是采用一种基于rssi和aoa的单基站定位系统及方法,仅面向二维划定空间定位,且存在无线传感网络穿透性差以及维修不方便的技术问题,一种用于三维划定空间区域的报警定位系统,并可满足输变电工程施工定位精度和灵敏度的技术尚不成熟。
技术实现要素:
4.针对现有技术中存在的上述问题,本发明的目的在于提供一种用于三维划定空间区域的报警定位系统技术。
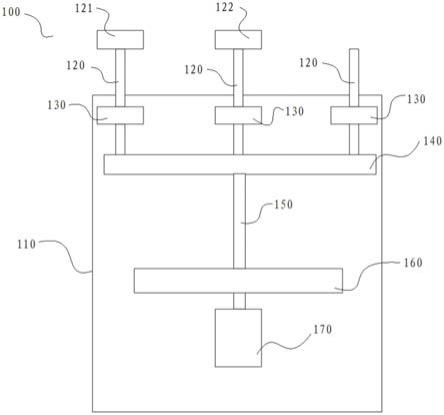
5.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于包括如下步骤:探针用来划定周围管线等危险区域,探针的输出端连接系统平台划定区域输入端;安装在操作机械上的活动标签,活动标签位置信息输出端与位置基准点固定传感器输入端连接,位置固定传感器输出端连接系统平台机械位置定位输入端,系统平台机械位置定位输出端连接系统平台安全区域输入端,安全区域输出端连接报警及制动模块输入端;系统平台输出端连接企业平台输入端。
6.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于探针划定出周围管线等危险区域,在现场移动终端显示中利用uwb或者其他定位技术定点予以规定和界定,规定或界定机械设备不能超出或者越界该区域。
7.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于活动标签设置在操作机械的特定位置上,如在起重吊车的吊臂头部和挂钩处、挖机的铲斗臂上方合适地点,利用uwb技术,wifi、蓝牙等定位技术,发射uwb信号来确定位置。
8.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于位置固定的传感器接受并估算从标签发送过来的信号,发送给现场计算机的软件平台。
9.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于系统平台机械位置定位模块将机械进行二维平面实时定位,判断是否超出划定工作范围;感知机械三维实时定位,对危险区域的操作空间距离定位,判断是否越界。
10.所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于系统平台检测、分析机械位置信息和其它相关信息,并发送给企业平台,进行数据保存和大数据分析。
11.通过采用上述技术,与现有技术相比,本发明的有益效果如下:
1)本发明通过探针,利用附近设定的基站对发现或者规定的危险区域进行划定,本划定区域在现场移动终端显示中利用uwb或者定点予以规定和界定,规定或界定不能超出或者越界该区域。
12.2)本发明利用uwb技术,wifi、蓝牙等定位技术,在操作机械的特定位置上设定移动标签,如在起重吊车的吊臂头部和挂钩处、挖机的铲斗臂上方合适地点等加设标签,通过电池供电的活动标签(ubisense tag),发射uwb信号来确定位置;位置固定的传感器(ubisense sensor),接受并估算从标签发送过来的信号;现场计算机的软件平台(ubisenseilocatetm),获取、分析并传输信息给用户和其它相关信息系统。
13.3)本发明利用系统平台,可以进行二维平面实时定位,避让同平面的危险区域,利用多重定位系统,感知定位三维实时定位,对吊车空间定位邻近带电线路操作的空间距离定位、对地线管线实际埋深的上层可操作空间进行定位,杜绝外破的发生。
14.4)本发明利用系统及时报警并在特定机械操作上制止相关操作,做到机械操作本质安全。
15.5)本发明通过5g通讯系统将有关数据上传至企业平台中,进行数据保存,操作运行轨迹记录,大数据分析等后台相关工作。
附图说明
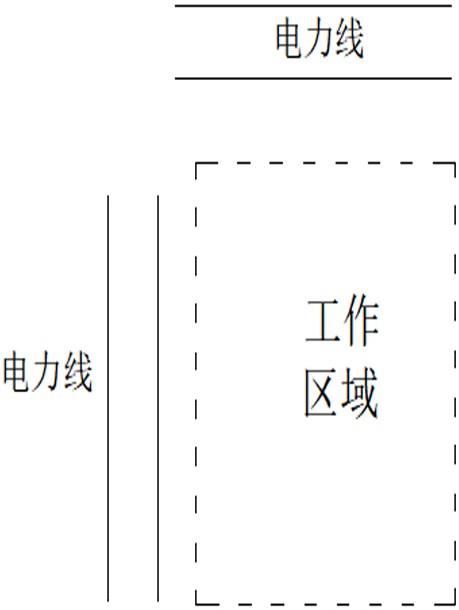
16.图1为工作区域平面图;图2为电力线断面图;图3为地下管线严禁开挖区域平面图;图4为地下管线立体图;图5为企业平台全流程示意图。
具体实施方式
17.以下对本发明作进一步的描述,单本发明的保护范围并不仅限于此:本发明的一种用于三维划定空间区域的预警定位系统技术,包括如下步骤:1)探针用来划定周围管线等危险区域:在现场移动终端显示中利用uwb或者其他定位技术予以规定和界定,规定或界定机械设备不能超出或者越界该区域。
18.2)探针的输出端连接系统平台划定区域输入端,安装在操作机械上的活动标签,活动标签位置信息输出端与位置固定传感器输入端连接,位置基准点传感器输出端连接系统平台机械位置定位输入端,系统平台机械位置定位输出端连接系统平台安全区域输入端,安全区域输出端连接报警及制动模块输入端:如在起重吊车的吊臂头部和挂钩处、挖机的铲斗臂上方合适地点,利用uwb技术,wifi、蓝牙等定位技术,发射uwb信号来确定位置。
19.3)系统平台输出端连接企业平台输入端:位置基准点的传感器接受并估算从标签发送过来的信号,发送给现场计算机的软件平台;系统平台机械位置定位模块将机械进行二维平面实时定位,判断是否超出划定工作范围;感知机械三维实时定位,对危险区域的操作空间距离定位,判断是否越界;系统平台检测、分析机械位置信息和其它相关信息,并发送给企业平台,进行数据保存和大数据分析。
技术特征:
1.一种用于三维划定空间区域的报警定位系统技术,其特征在于包括如下步骤:探针用来划定周围管线等危险区域,探针的输出端连接系统平台划定区域输入端;安装在操作机械上的活动标签,活动标签位置信息输出端与位置基准点输入端通过无线连接,位置基准点固定传感器输出端连接系统平台机械位置定位输入端,系统平台机械位置定位输出端连接系统平台安全区域输入端,安全区域输出端连接报警及制动模块输入端;系统平台输出端连接企业平台输入端。2.根据权利要求1所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于探针划定出周围管线等危险区域后,在现场移动终端显示中利用uwb等定位技术予以规定和界定,规定或界定机械设备不能超出或者越界该区域。3.根据权利要求2所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于活动标签设置在操作机械的特定位置上,如在起重吊车的吊臂头部和挂钩处、挖机的铲斗臂上方合适地点,利用uwb技术,wifi、蓝牙等定位技术,发射uwb信号来确定位置。4.根据权利要求3所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于位置固定的传感器接受并估算从标签发送过来的信号,发送给现场计算机的软件平台。5.根据权利要求4所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于系统平台机械位置定位模块将机械进行二维平面实时定位,判断是否超出划定工作范围;感知机械三维实时定位,对危险区域的操作空间距离定位,判断是否越界。6.根据权利要求5所述的一种用于三维划定空间区域的报警定位系统技术,其特征在于系统平台检测、分析机械位置信息和其它相关信息,并发送给企业平台,进行数据保存和大数据分析。
技术总结
一种用于三维划定空间区域的报警定位系统技术,属于建筑施工工程领域。它包括如下步骤:探针用来划定周围管线等危险区域,探针的输出端连接系统平台划定区域输入端;安装在操作机械上的活动标签,活动标签位置信息输出端与位置固定传感器输入端连接,位置固定传感器输出端连接系统平台机械位置定位输入端,系统平台机械位置定位输出端连接系统平台安全区域输入端,安全区域输出端连接报警及制动模块输入端;系统平台输出端连接企业平台输入端。解决了机械作业中人为操作失误而引发的事故状态,机械实时定位,实时报警提示,机械的设备自动智能控制,避免引发事故。避免引发事故。避免引发事故。
技术研发人员:鲁飞 张可可 王涛
受保护的技术使用者:张可可 王涛
技术研发日:2020.06.02
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。