一种sar影像水体提取方法、装置、电子设备及存储介质
技术领域
1.本技术涉及遥感影像处理技术领域,尤其是涉及一种sar影像水体提取方法、装置、电子设备及存储介质。
背景技术:
2.合成孔径雷达(sar)在提取地表水体范围的应用中较光学遥感更具优势,原因在于:sar为主动式雷达传感器,不依赖于太阳的辐射,可昼夜观测;采用的电磁波为微波波段,波长约1mm~1m,穿透能力强,不受云雾遮挡,可全天候观测,甚至能够穿过树冠,探测林下水域;开放、平滑(相对于sar使用的波长而言,无波或小波)的水域通常表现出较低的后向散射系数,在sar影像上表现较为统一。针对sar的水体提取已得到不少研究和应用,以下列出了基于sar影像水体提取的几类主要方法:基于阈值分割的水体提取方法:利用水体在sar辐射亮度图中亮度较低的特性,通过经验法、双峰法、最大类间方差算法、多阈值分割、熵阈值算法等实现全局或局部的水体分割阈值,认为小于该阈值的像素为水体。该类方法计算简单,运算效率高,但精度较低,无法区分与水体散射特性相似的地物。
3.基于纹理的水体提取方法:水体的表面粗糙度显著低于其他地物,在sar影像中表现为极度同质区域,纹理变化小,采用灰度共生矩阵计算同质性特征参数,同质性高的区域标记为水体。该方法可能受到浅草、裸地等纹理特征与水体相似的地物影响。
4.基于极化分解的水体提取方法:极化特征反映了地物的结构特征,不同结构具有不同的后向散射机制,采用非相干分解方法可以将目标的相干矩阵分解为面散射、二面角散射和体散射3个分量的和,水体在3个散射分量的功率都远低于其他地物。该类方法可能受到相似散射机制地物的干扰,如房顶、机场跑道等。
5.基于机器学习的水体提取方法:提取sar影像的后向散射系数、衍生指数等作为特征,和水体标签组成训练样本,将其作为输入传入分类器进行训练,常用的分类器有支持向量机、随机森林等。该类方法的影像分类效果较好,但需要对sar数据进行预处理提取有效的特征用以训练。
6.随着深度学习在遥感领域的迅速发展,在sar影像语义分割领域,fcn、u
‑
net等深度学习模型相继得到实验验证,但受到sar影像、处理软件和样本、深度学习算法等限制,利用深度学习进行遥感影像的水体提取普遍精度不高。
技术实现要素:
7.有鉴于此,本技术提供sar影像的水体提取方法、装置、电子设备及存储介质,以解决有技术中利用深度学习进行遥感影像水体提取存在的精度不高和效率低的技术问题。
8.一方面,本技术实施例提供了一种sar影像水体提取方法,包括:获取待检测sar影像;对所述待检测sar影像进行预处理;
通过水体分割模型,对所述预处理后的待检测sar影像进行处理,得到水体分割结果;其中,所述水体分割模型为增加双注意力机制的deeplabv3 语义分割模型,并通过包含sar影像样本和dem数据的样本数据集训练得到。
9.进一步的,所述水体分割模型包括:编码器和解码器;所述编码器至少包括:特征提取模块、空间金字塔池化模块、双注意力机制模块和融合模块;通过水体分割模型,对所述预处理后的待检测sar影像进行处理,得到水体分割结果;包括:通过所述特征提取模块,提取预处理后的待检测sar影像的语义特征图f1和低级语义特征图f2,将语义特征图f1分别输入空间金字塔池化模块和双注意力机制模块,将低级语义特征图f2输入解码器;通过所述空间金字塔池化模块,对语义特征图f1进行处理,得到不同尺度的特征图,将不同尺度的特征图融合后得到语义特征f3;通过所述双注意力机制模块,对语义特征图f1进行位置注意力机制和通道注意力机制处理,得到语义特征f4;通过所述融合模块,对语义特征f3和语义特征f4进行融合,得到高级语义特征f5,将高级语义特征f5输出至解码器;通过所述解码器,对低级语义特征f2和高级语义特征f5进行融合,得到水体分割结果。
10.进一步的,所述特征提取模块采用带空洞的resnet
‑
50,resnet
‑
50共包含5个卷积块;第一卷积块为单一卷积层;第二卷积块包括3个顺序连接的残差模块;第三卷积块包括4个顺序连接的残差模块;第四卷积块包括6个顺序连接的残差模块;第五卷积块包括3个顺序连接的残差模块,其中,第五卷积块的卷积方式为空洞卷积;所述残差模块包括:三个顺序连接的卷积核1
×
1,3
×
3,1
×
1和第一加法单元,三个卷积核对输入特征进行处理,输出输入特征的残差,第一加法单元将输入特征的残差和输入特征进行映射相加,输出处理后的输入特征;通过所述特征提取模块,提取预处理后的待检测sar影像的语义特征图f1和低级语义特征图f2;包括:将经过第一卷积块和第二卷积块处理得到特征图作为低层语义特征图f2;将经过第一卷积块、第二卷积块、第三卷积块、第四卷积块和第二卷积块处理得到特征图作为语义特征图f1。
11.进一步的,所述通过所述空间金字塔池化模块,对语义特征图f1进行处理,得到不同尺度的特征图,将不同尺度的特征图融合后得到语义特征f3;包括:利用1
×
1卷积核对特征图f1进行处理,得到第一尺度的特征图;利用膨胀率分别为12、24、36的3
×
3卷积核对特征图f1进行处理,得到第二尺度特征图、第三尺度特征图和第四尺度特征图;对特征图f1进行全局平均池化处理,得到第五尺度的特征图;将第一尺度的特征图、第二尺度的特征图、第三尺度的特征图、第四尺度的特征图和第五尺度的特征图连接起来;
利用1
×
1卷积核对五个连接起来的不同尺度的特征图进行降维处理,得到特征图f3。
12.进一步的,所述双注意力机制模块包括位置注意力单元、通道注意力单元和第二加法单元;通过所述双注意力机制模块,对语义特征图f1进行位置注意力机制和通道注意力机制处理,得到语义特征f4;包括:通过所述位置注意力单元,对大小为c
×
h
×
w的特征图f1分别进行三次卷积操作,获得与特征图f1大小相同的特征图q、特征图k和特征图v;将经过维度转换和转置的特征图q与维度转换后的特征图k做矩阵相乘,然后使用softmax函数对矩阵相乘结果进行处理得到大小为(h
×
w)
×
(h
×
w)的空间注意力图s;将特征图v重构回大小为c
×
(h
×
w)的特征图,然后与转置后的注意力图s相乘,将相乘的结果重构回大小为c
×
h
×
w的特征图,将该c
×
h
×
w的特征图乘以权重参数α并叠加到特征图f1上,得到特征图e1;通过通道注意力单元,将大小为c
×
h
×
w的特征图f1重构回大小为c
×
(h
×
w)的特征图b,将特征图b与转置后的特征图b的进行相乘,并通过softmax函数对激活得到大小为c
×
c的通道注意力图x;将转置后的通道注意力图x的与特征图b相乘并重构回c
×
h
×
w的特征图,将c
×
h
×
w的特征图乘以权重系数β并叠加到特征图f1上,得到特征图e2;通过第二加法单元对特征图e1和特征图e2进行相加,得到特征图f4。
13.进一步的,所述方法还包括:对水体模型进行训练的步骤,具体包括:步骤s1:建立训练样本数据集;所述训练样本数据集包括sar影像和外部dem数据;步骤s2:采用迁移学习对一个resnet
‑
50网络进行预训练,利用训练好的resnet
‑
50网络初始化水体分割模型的模型参数;步骤s3:将训练样本数据集数据分成多个batch;步骤s4:将一个batch的数据输入水体分割模型,得到预测结果,利用预测结果和样本标签结果计算损失函数:其中,为预测为真实标签的概率,γ为参数;步骤s5:利用损失函数更新水体分割模型的参数;迭代步骤s3至步骤s5,直至训练样本数据集全部训练完毕。
14.进一步的,所述建立训练样本数据集,包括:采集多幅星载sar影像;以已有光学影像作为地理参考基准,通过多模态匹配技术,对每幅星载sar影像进行控制点匹配,直接获取匹配点地理坐标或投影坐标,并将获取到的匹配点作为区域网平差控制点、连接点,生成具有地理参考的sar影像;根据像素值范围确定水体区域的阈值分割方法,对预处理后的sar影像进行自动水体初步标注;对比同期的光学遥感影像,结合专家解译知识,对错误标记的区域进行人工纠正,得到正样本数据;使用外部dem数据模拟sar影像,将模拟sar影像中的山体阴影区域作为负样本数据;
将道路数据作为负样本数据;对正样本数据和负样本数据均进行切片,获取到训练样本数据集。
15.另一方面,本技术实施例提供了一种sar影像水体提取装置,包括:图像获取单元,用于获取待检测sar图像;预处理单元,用于对所述待检测sar图像进行预处理;水体提取单元,用于通过水体分割模型,对所述预处理后的待检测sar图像进行处理,得到水体分割结果;其中,所述水体分割模型为增加双注意力机制的deeplabv3 语义分割模型,并通过包含sar影像和外部dem数据的样本数据集训练得到。
16.另一方面,本技术实施例提供了一种电子设备,包括:存储器、处理器和存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本技术实施例的sar影像水体提取方法。
17.另一方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时实现本技术实施例的sar影像水体提取方法。
18.本技术通过在deeplabv3 语义分割模型中增加双注意力机制,构建一个水体分割模型,并通过包含sar影像样本和dem数据的样本数据集训练水体分割模型,通过训练完成的水体分割模型对待检测sar影像进行水体提取,能够提高水体提取的精度和效率。
附图说明
19.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本技术实施例提供的sar影像水体提取方法的流程图 ;图2为本技术实施例提供的水体分割模型的结构示意图;图3为本技术实施例提供的sar影像水体提取装置的功能结构示意图;图4为本技术实施例提供的电子设备的硬件结构示意图。
具体实施方式
21.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
22.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.首先对本技术实施例的设计思想进行简单介绍。
24.现有的非深度学习sar影像水体提取算法普遍精度较低,已有深度学习sar水体提
取方法没有形成完整的生产应用处理流程。
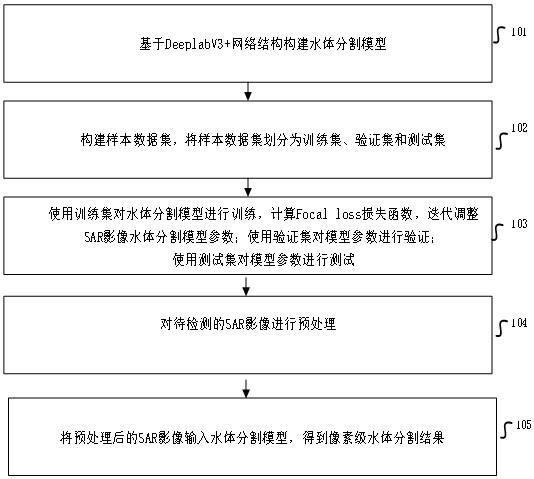
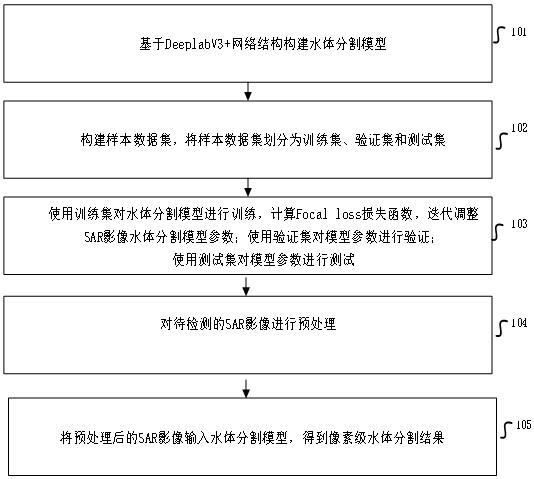
25.为解决上述问题,本技术实施例提供了一种sar影像水体提取方法,首先通过改造deeplabv3 网络结构构造水体分割模型,该模型可以进行sar水体要素的提取;基于deeplabv3 网络的空洞空间金字塔池化aspp,能够克服sar影像相干斑噪声,提高水体提取视野,进行多尺度的水体要素检测;在deeplabv3 网络中引入双注意力机制模块(damm),将双注意力机制damm与空洞空间金字塔池化aspp并行连接,并行处理主干网提取特征图,再融合两层处理特征信息作为高层语义特征。在水体分割模型的训练中,引入dem数据和负样本数据,融合剔除山体阴影、道路等影像;最后加入focal loss计算损失以解决类别不平衡问题,从而解决sar影像水体要素的提取难题。
26.在介绍了本技术实施例的应用场景和设计思想之后,下面对本技术实施例提供的技术方案进行说明。
27.如图1所示,本技术实施例提供了一种sar影像水体提取方法,包括:步骤101:基于deeplabv网络结构构建水体分割模型;本技术实施例设计了一个水体分割模型,本质上是一个深度学习网络,基于deeplabv3 网络的空洞空间金字塔池化(atrous spatial pyramid pooling, aspp),引入双注意力机制模块(dual attention mechanism module, damm),主干网络为resnet
‑
50,将主干网络提取的特征图分别送入damm层与aspp层,融合两层处理特征图作为高层语义信息;其中,使用了基于deeplabv3 网络的带有空洞卷积的aspp,克服sar影像相干斑噪声影响,提高水体提取感受野,满足多尺度的水体要素分割。
28.引入damm层与 aspp层并行连接,改善deeplabv3 网络在遥感影像分割中拟合速度慢,边缘目标分割不精确,大尺度目标分割类内不一致,存在孔洞等问题。
29.如图2所示,水体分割模型的主体结构包括编码器和解码器两部分;以resnet
‑
50作为编码器主体网络,获取语义特征图f1和低级语义特征图f2;将特征图f1分别输入aspp模块和damm,并将两个支路的特征图融合获取高级语义特征f5;解码器沿用deeplabv3 的解码操作,联合高级语义特征f5和低级语义特征f2获取分割结果。
30.编码器主体结构为resnet
‑
50,通过增加残差模块解决了网络加深而准确率下降的问题。一个残差模块具体为:输入特征经过三次卷积操作(1
×
1,3
×
3,1
×
1)后得到该特征的残差,并与输入特征的直接映射相加,其中3
×
3卷积前面的1
×
1卷积用来降维,后面的1
×
1卷积用来升维,可以减少参数计算量。resnet
‑
50共包含5个卷积块,除第1个卷积块为单一的卷积层(包含了bn层和relu激活层),后4个卷积块分别由3个、4个、6个、3个上述残差模块顺序连接构成,需注意第5个卷积块的卷积方式为空洞卷积。
31.提取经过5个卷积块运算得到的特征图f1,作为后续aspp模块和damm的输入;提取只经过前2个卷积块运算得到的低层语义特征图f2,为解码器提供底层信息。
32.将特征图f1输入assp模块,分别对其进行1
×
1卷积,膨胀率分别为12、24、36的3
×
3卷积,以及全局平均池化,从而获取不同尺度下的特征图,将5个特征图连接起来后,采用1
×
1卷积降维,得到特征图f3。该模块的使用满足了多尺度水体要素的检测需求,同时也克服了sar影像本身固有的相干斑噪声。
33.将特征图f1传入damm,实现damm与aspp模块并行处理,damm包括位置注意力单元、通道注意力单元和加法单元;
位置注意力单元:对输入特征图f1(大小为c
×
h
×
w)进行卷积获得q、k、v,特征图q、k、v与f1大小相等,q经过维度转换和转置与维度转换后的k做矩阵乘法,使用softmax得到大小为(h
×
w)
×
(h
×
w)的空间注意力图s,sji为第i个位置对第j个位置的影响,可以理解为两个位置之间的关联程度,s越大表明两个位置越相似。特征图v重构为c
×
(h
×
w)大小的特征图,与注意力s的转置相乘,并重构回c
×
h
×
w,乘以权重参数α并叠加到特征图f1上,得到特征图e1,注意α初始化为0,并逐渐学习分配到更大的权重。引入位置注意模块建立丰富的全局特征上下文信息,从而使得不同位置同特征得到增强,提高语义分割能力。
34.通道注意力模块cam:直接将特征图f1重构为c
×
(h
×
w)大小,记为b,将b与b的转置相乘,并通过softmax激活得到大小为c
×
c的通道注意力图x,xji度量了第i个通道对第j个通道的影响。将x的转置与b相乘并重构到c
×
h
×
w大小,乘以权重系数β,叠加到特征图f1上,得到特征图e2,注意β初始化为0,并逐渐学习分配到更大的权重。引入位置注意模块通过挖掘不同通道相关类别特征间的相互依赖关系,进行不同类别特征强化,提升语义分割精度。
35.加法单元,对位置注意力单元输出特征图e1和通道注意力单元输出特征图e2进行相加,得到特征图f4。
36.特征图f1经过上述aspp和damm模块处理,分别得到特征图f3和特征图f4,将特征图f3和特征图f4融合得到高层语义特征f5。
37.解码器沿用deeplabv3 解码器,对高层语义特征f5进行上采样,并与低层语义特征f2连接,经过卷积和上采样输出影像分割结果图。
38.步骤102:构建样本数据集,将样本数据集划分为训练集、验证集和测试集;该步骤具体包括:步骤2a:采集高精度星载sar影像,构建一套多场景、多极化、多时相的数据集,对数据集进行异源平差处理;从中国资源卫星应用中心申请下载国产高分三号sar雷达卫星数据,包含fsi(精细条带1,分辨率5m)和fsii(精细条带2,分辨率10m)成像。数据主要覆盖长江中下游流域,包含山区、城镇、滨海等多种场景,具有多种极化方式hh、vv、hv、vh,时间跨度从2018年2月至2019年3月。
39.对大尺度sar影像开展多源平差处理,以已有光学影像作为地理参考基准,通过多模态匹配技术,对sar数据进行控制点匹配,直接获取匹配点高精度地理坐标或投影坐标,并将获取到的匹配点作为区域网平差控制点、连接点,大规模、全流程自动生成具有地理参考的sar影像。
40.步骤2b:对数据集的sar影像进行自动水体初步标注,在水体识别结果及同期光学影像基础上,结合专家解译知识,对错误标记的区域进行人工纠正,获取高质量水体标注正样本;引入外部dem数据模拟sar影像,获取山体阴影负样本;引入道路负样本;对预处理得到的sar影像进行自动水体初步标注,使用方法是根据像素值范围确定水体区域的阈值分割方法,快速获取初级的水体标注结果;对比同期的光学遥感影像,结合专家解译知识,对错误标记的区域进行人工纠正,如与水体同样具有较低回波反射强度的山体阴影、机场跑道等区域,去除相干斑噪声引起的误检,补充部分由于水面波纹、浪潮等引起的漏检。
41.由于sar为侧视成像(一般为右视成像),山体背离传感器一侧的坡体由于遮挡无法接受到雷达波束,在sar影像上表现为与水体相似的暗像素。根据雷达传感器的成像几何,使用外部dem数据模拟sar影像,将模拟sar影像中的山体阴影区域作为负样本加入训练数据。部分道路较为平滑,对雷达信号产生了镜面反射,在sar影像中亦呈现出较低亮度。将道路数据作为负样本加入到训练样本中。
42.步骤2c:对完成标注的影像数据(正样本和负样本)进行切片,切片大小为512
×
512,共获取了46500对样本数据集,将样本数据按照8:1:1的比例划分为训练集、验证集和测试集。
43.步骤103:使用训练集对水体分割模型进行训练,计算focal loss损失函数,迭代调整sar影像水体分割模型参数;使用验证集对模型参数进行验证;使测试集对模型参数进行测试;采用迁移学习对resnet
‑
50进行预训练,加载在imagenet数据集上训练好的resnet
‑
50模型,将预训练模型初始化水体分割模型的模型参数;采用focal loss计算损失,解决类别不平衡问题,采用随机梯度下降作为优化函数。
44.该步骤具体包括:步骤3a:将训练集数据分成小batch;其中,每个batch的大小根据硬件条件确定;步骤3b:将一个batch的数据输入到水体分割模型,得到影像预测结果,根据标注结果计算focal loss,损失函数的定义为:其中,为预测为真实标签的概率,当参数γ>1时,对于模型预测正确概率大的样本,损失函数就较小,而对于模型预测正确概率较小的,损失函数不会大幅减小。这使得在数据类别不平衡的情况下,会让模型的注意力放在稀少的类别上。
45.步骤3c:采用随机梯度下降为优化函数,更新网络中的模型参数;迭代3b
‑
3c步骤,直至训练集数据全部训练完毕。
46.步骤3d:将验证集数据输入到水体分割模型中,获取预测标签,采取平均精度和平均交并比作为网络模型预测结果的评价指标,计算公式如下:其中,tp表示真实为1,预测为1;tn表示真实为0,预测为0;fn表示真实为1,预测为0;fp表示真实为0,预测为1;acc为精确度,acc水为水体预测的精确度,acc非水为非水体预测的精确度,macc为平均精度;iou为交并比,iou水为水体交并比,iou非水为非水体交并
比,miou为平均交并比。在本技术实施例中,类别仅有水体和非水体(背景)。
47.迭代步骤3a
‑
3d,直至达到一定的迭代次数或预测精度,选取表现最优的模型作为最终的水体分割模型。
48.步骤3e:将测试集数据输入到水体分割模型中,获取预测标签。
49.步骤104:对待检测的sar影像进行预处理;对待检测的sar影像进行预处理,通过dem数据去除山体阴影,去除道路。
50.步骤105:将预处理后的sar影像输入水体分割模型,输出像素级水体分割结果。
51.本技术实施例实现了对长江流域不同季节、不同风况、山体阴影、不同尺度水体范围等多场景下的水体高精度、自动化提取,水体提取精度指标中平均精度达到macc = 97.82%,平均交并比达到miou = 0.96,具有较强的模型泛化能力,达到工程化应用水平。
52.本技术的效果通过以下应用实例进一步说明:获取长江中下游流域的高分三号雷达卫星数据,包含fsi(精细条带1,分辨率5m)和fsii(精细条带2,分辨率10m)成像模式,通过本技术实施例的方法获得流域级高精度水体提取范围。
53.获取鄱阳湖2021年5月10日与2021年5月22日两个时相哨兵一号雷达卫星数据,通过本技术实施例的方法,分别提取两个时相的水体范围,并做差得到洪水淹没范围。
54.依据两期水体提取结果,定量统计分析得出,鄱阳湖候鸟保护区和南矶湿地两个国家级自然保护区水体面积分别扩增了79.6%和150%,总扩增了275.7平方千米。
55.表1:保护区水域范围统计实施例二:基于上述实施例,本技术实施例提供了一种sar影像水体提取装置,参阅图3所示,本技术实施例提供的sar影像水体提取装置300至少包括:获取单元301,用于获取待检测sar图像;预处理单元302,用于对所述待检测sar图像进行预处理;水体提取单元303,用于通过水体分割模型,对所述预处理后的待检测sar图像进行处理,得到水体分割结果;训练单元304,用于通过包含sar影像和外部dem数据的样本数据集训练水体分割模型。
56.在一种可能的实施方式中,所述水体分割模型包括:编码器和解码器;所述编码器至少包括:特征提取模块、空间金字塔池化模块、双注意力机制模块和融合模块;所述水体提取单元303具体用于:通过所述特征提取模块,提取预处理后的待检测sar影像的语义特征图f1和低级语义特征图f2,将语义特征图f1分别输入空间金字塔池化模块和双注意力机制模块,将低
级语义特征图f2输入解码器;通过所述空间金字塔池化模块,对语义特征图f1进行处理,得到不同尺度的特征图,将不同尺度的特征图融合后得到语义特征f3;通过所述双注意力机制模块,对语义特征图f1进行位置注意力机制和通道注意力机制处理,得到语义特征f4;通过所述融合模块,对语义特征f3和语义特征f4进行融合,得到高级语义特征f5,将高级语义特征f5输出至解码器;通过所述解码器,对低级语义特征f2和高级语义特征f5进行融合,得到水体分割结果。
57.在一种可能的实施方式中,所述特征提取模块采用带空洞的resnet
‑
50,resnet
‑
50共包含5个卷积块;第一卷积块为单一卷积层;第二卷积块包括3个顺序连接的残差模块;第三卷积块包括4个顺序连接的残差模块;第四卷积块包括6个顺序连接的残差模块;第五卷积块包括3个顺序连接的残差模块,其中,第五卷积块的卷积方式为空洞卷积;所述残差模块包括:三个顺序连接的卷积核1
×
1,3
×
3,1
×
1和第一加法单元,三个卷积核对输入特征进行处理,输出输入特征的残差,第一加法单元将输入特征的残差和输入特征进行映射相加,输出处理后的输入特征;通过所述特征提取模块,提取预处理后的待检测sar影像的语义特征图f1和低级语义特征图f2;包括:将经过第一卷积块和第二卷积块处理得到特征图作为低层语义特征图f2;将经过第一卷积块、第二卷积块、第三卷积块、第四卷积块和第二卷积块处理得到特征图作为语义特征图f1。
58.在一种可能的实施方式中,所述通过所述空间金字塔池化模块,对语义特征图f1进行处理,得到不同尺度的特征图,将不同尺度的特征图融合后得到语义特征f3;包括:利用1
×
1卷积核对特征图f1进行处理,得到第一尺度的特征图;利用膨胀率分别为12、24、36的3
×
3卷积核对特征图f1进行处理,得到第二尺度特征图、第三尺度特征图和第四尺度特征图;对特征图f1进行全局平均池化处理,得到第五尺度的特征图;将第一尺度的特征图、第二尺度的特征图、第三尺度的特征图、第四尺度的特征图和第五尺度的特征图连接起来;利用1
×
1卷积核对五个连接起来的不同尺度的特征图进行降维处理,得到特征图f3。
59.在一种可能的实施方式中,所述双注意力机制模块包括位置注意力单元、通道注意力单元和第二加法单元;通过所述双注意力机制模块,对语义特征图f1进行位置注意力机制和通道注意力机制处理,得到语义特征f4;包括:通过所述位置注意力单元,对大小为c
×
h
×
w的特征图f1分别进行三次卷积操作,获得与特征图f1大小相同的特征图q、特征图k和特征图v;将经过维度转换和转置的特征图q与维度转换后的特征图k做矩阵相乘,然后使用softmax函数对矩阵相乘结果进行处理得到大小为(h
×
w)
×
(h
×
w)的空间注意力图s;将特征图v重构回大小为c
×
(h
×
w)的特征图,
然后与转置后的注意力图s相乘,将相乘的结果重构回大小为c
×
h
×
w的特征图,将该c
×
h
×
w的特征图乘以权重参数α并叠加到特征图f1上,得到特征图e1;通过通道注意力单元,将大小为c
×
h
×
w的特征图f1重构回大小为c
×
(h
×
w)的特征图b,将特征图b与转置后的特征图b的进行相乘,并通过softmax函数对激活得到大小为c
×
c的通道注意力图x;将转置后的通道注意力图x的与特征图b相乘并重构回c
×
h
×
w的特征图,将c
×
h
×
w的特征图乘以权重系数β并叠加到特征图f1上,得到特征图e2;通过第二加法单元对特征图e1和特征图e2进行相加,得到特征图f4。
60.在一种可能的实施方式中,所述训练单元304具体用于:步骤s1:建立训练样本数据集;所述训练样本数据集包括sar影像和外部dem数据;步骤s2:采用迁移学习对一个resnet
‑
50网络进行预训练,利用训练好的resnet
‑
50网络初始化水体分割模型的模型参数;步骤s3:将训练样本数据集数据分成多个batch;步骤s4:将一个batch的数据输入水体分割模型,得到预测结果,利用预测结果和样本标签结果计算损失函数:其中,为预测为真实标签的概率,γ为参数;步骤s5:利用损失函数更新水体分割模型的参数;迭代步骤s3至步骤s5,直至训练样本数据集全部训练完毕。
61.在在一种可能的实施方式中,所述建立训练样本数据集,包括:采集多幅星载sar影像;以已有光学影像作为地理参考基准,通过多模态匹配技术,对每幅星载sar影像进行控制点匹配,直接获取匹配点地理坐标或投影坐标,并将获取到的匹配点作为区域网平差控制点、连接点,生成具有地理参考的sar影像;根据像素值范围确定水体区域的阈值分割方法,对预处理后的sar影像进行自动水体初步标注;对比同期的光学遥感影像,结合专家解译知识,对错误标记的区域进行人工纠正,得到正样本数据;使用外部dem数据模拟sar影像,将模拟sar影像中的山体阴影区域作为负样本数据;将道路数据作为负样本数据;对正样本数据和负样本数据均进行切片,获取到训练样本数据集。
62.实施例三:基于上述实施例,本技术实施例还提供了一种电子设备,参阅图4所示,本技术实施例提供的电子设备400至少包括:处理器401、存储器402和存储在存储器402上并可在处理器401上运行的计算机程序,处理器401执行计算机程序时实现本技术实施例提供的sar影像水体提取方法。
63.本技术实施例提供的电子设备400还可以包括连接不同组件(包括处理器401和存储器402)的总线403。其中,总线403表示几类总线结构中的一种或多种,包括存储器总线、外围总线、局域总线等。
64.存储器402可以包括易失性存储器形式的可读介质,例如随机存储器(random access memory,ram)4021和/或高速缓存存储器4022,还可以进一步包括只读存储器(read only memory,rom)4023。
65.存储器402还可以包括具有一组(至少一个)程序模块4025的程序工具4024,程序模块4025包括但不限于:操作子系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
66.电子设备400也可以与一个或多个外部设备404(例如键盘、遥控器等)通信,还可以与一个或者多个使得用户能与电子设备400交互的设备通信(例如手机、电脑等),和/或,与使得电子设备400与一个或多个其它电子设备400进行通信的任何设备(例如路由器、调制解调器等)通信。这种通信可以通过输入/输出(input /output,i/o)接口403进行。并且,电子设备400还可以通过网络适配器406与一个或者多个网络(例如局域网(local area network,lan),广域网(wide area network,wan)和/或公共网络,例如因特网)通信。如图4所示,网络适配器406通过总线403与电子设备400的其它模块通信。应当理解,尽管图4中未示出,可以结合电子设备400使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理器、外部磁盘驱动阵列、磁盘阵列(redundant arrays of independent disks,raid)子系统、磁带驱动器以及数据备份存储子系统等。
67.需要说明的是,图4所示的电子设备400仅仅是一个示例,不应对本技术实施例的功能和使用范围带来任何限制。
68.实施例四:本技术实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机指令,该计算机指令被处理器执行时实现本技术实施例提供的sar影像水体提取方法。
69.应当注意,尽管在上文详细描述中提及了装置的若干单元或子单元,但是这种划分仅仅是示例性的并非强制性的。实际上,根据本技术的实施方式,上文描述的两个或更多单元的特征和功能可以在一个单元中具体化。反之,上文描述的一个单元的特征和功能可以进一步划分为由多个单元来具体化。
70.此外,尽管在附图中以特定顺序描述了本技术方法的操作,但是,这并非要求或者暗示必须按照该特定顺序来执行这些操作,或是必须执行全部所示的操作才能实现期望的结果。附加地或备选地,可以省略某些步骤,将多个步骤合并为一个步骤执行,和/或将一个步骤分解为多个步骤执行。
71.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。