1.本发明涉及一种由线性模块驱动滑动件的技术。
背景技术:
2.在专利文献1中记载了由线性马达方式驱动滑动件的线性模块。即,滑动件具有包括永磁铁的定子,线性模块具有包括电磁铁的定子。并且,线性模块通过由于向电磁铁供给电流而在定子与电磁铁之间产生的磁的相互作用来驱动滑动件。
3.特别是在专利文献1中设定有沿滑动件的驱动方向排列的多个区域,线性模块具有由区段控制器和定子分别构成的多个驱动器,多个驱动器分别对应于多个区域。并且,各驱动器执行存在于负责的区域的滑动件的驱动。
4.现有技术文献
5.专利文献
6.专利文献1:usre39747e
技术实现要素:
7.发明所要解决的课题
8.像这样想要通过对多个驱动器的每一个设置多个负责区域的线性模块来驱动滑动件的话,则有必要使对应于滑动件所存在的负责区域的驱动器准确地执行该滑动件的驱动。
9.本发明是鉴于上述课题而完成的,以提供如下的技术为目的:能够在对应于多个驱动器的每一个设置多个负责区域的线性模块中,使对应于滑动件所存在的负责区域的驱动器准确地执行滑动件的驱动。
10.用于解决课题的技术方案
11.本发明的线性输送机系统,具备:滑动件,具有包括永磁铁的线性马达动子;线性模块,具有分别对应于在滑动件的驱动方向上排列的多个负责区域而配置的多个驱动器,多个驱动器的每一个负责在对应的负责区域上重叠的滑动件的向驱动方向的驱动;及主控制装置,向驱动器发送控制信号,滑动件具有存储用于识别该滑动件的识别符的存储部,控制信号将对于滑动件的驱动指令与滑动件的识别符建立对应地表示,驱动器具有配置于对应的负责区域内并包括电磁铁的线性马达定子、从在对应的负责区域上重叠的滑动件的存储部读取识别符的读取部及向线性马达定子供给电流的驱动控制部,通过驱动控制部向线性马达定子供给对应于通过控制信号而与由读取部读取的识别符建立了对应的驱动指令的电流,从而将在对应的负责区域上重叠的滑动件向驱动方向驱动。
12.本发明的线性模块,具备分别对应于在滑动件的驱动方向上排列的多个负责区域而配置的多个驱动器,所述滑动件具有包括永磁铁的线性马达动子,多个驱动器的每一个负责在对应的负责区域上重叠的滑动件的向驱动方向的驱动,驱动器具有配置于对应的负责区域内并包括电磁铁的线性马达定子、从在对应的负责区域上重叠的滑动件读取用于识
别该滑动件的识别符的读取部、向线性马达定子供给电流的驱动控制部及接收将对于滑动件的驱动指令与滑动件的识别符建立对应地表示的控制信号的通信处理部,通过驱动控制部向线性马达定子供给对应于通过控制信号而与由读取部读取的识别符建立了对应的驱动指令的电流,从而将在对应的负责区域上重叠的滑动件向驱动方向驱动。
13.本发明的线性模块的控制方法,所述线性模块具备分别对应于在滑动件的驱动方向上排列的多个负责区域而配置的多个驱动器,滑动件具有包括永磁铁的线性马达动子,驱动器具有配置于对应的负责区域内并包括电磁铁的线性马达定子,其中,线性模块的控制方法包括如下工序:驱动器从在对应的负责区域上重叠的滑动件读取用于识别该滑动件的识别符;将对于滑动件的驱动指令与滑动件的识别符建立对应地表示的控制信号向驱动器发送;及驱动器将对应于通过控制信号而与从滑动件读取的识别符建立了对应的驱动指令的电流向线性马达定子供给,从而将在对应的负责区域上重叠的滑动件向驱动方向驱动。
14.在这样构成的本发明(线性输送机系统,线性模块以及线性模块的控制方法)中,用于识别滑动件的识别符被赋予该滑动件。对于此,向多个驱动器发送的控制信号将对于滑动件的驱动指令与该滑动件的识别符建立对应地表示。并且,驱动器从在其负责区域上重叠的滑动件读取用于识别该滑动件的识别符,并将对应于通过控制信号而与该识别符建立了对应的驱动指令的电流向线性马达定子供给。即,多个驱动器中的对应于滑动件所重叠的负责范围的驱动器从滑动件读取识别符,并根据与该识别符建立了对应的驱动指令来驱动滑动件。这样,能够使对应于滑动件所存在的负责区域的驱动器准确地执行滑动件的驱动。
15.另外,线性输送机系统也可以构成为主控制装置向多个驱动器发送相同的控制信号。在该构成中,主控制装置生成包括作为控制对象的滑动件的识别符与驱动指令的控制信号,仅通过将该控制信号发送给多个驱动器,就能够使对应于滑动件所存在的负责区域的驱动器准确地驱动该滑动件。即,并不是通过从多个驱动器之中确定应该执行滑动件的驱动的驱动器并对它发送驱动指令这样的控制,而是通过对多个驱动器一齐发送控制信号这样的简单的控制,就能够适当地驱动滑动件。
16.另外,线性输送机系统也可以构成为,线性模块能够使用多个驱动器来驱动多个滑动件,存储部存储用于识别多个滑动件的每一个的识别符,控制信号将对于滑动件的驱动指令与作为驱动指令的对象的滑动件的识别符建立对应,并对每个滑动件表示。在该构成中,对于多个滑动件的每一个,生成将该滑动件的驱动指令与识别符建立对应地表示的控制信号并发送给多个驱动器,由此能够准确地驱动多个滑动件的每一个。
17.另外,线性输送机系统也可以构成为,驱动器以规定的读取周期尝试进行读取部对识别符的读取,通过驱动控制部向线性马达定子供给对应于通过控制信号而与读取成功的识别符建立了对应的驱动指令的电流。在该构成中,由于各驱动器以规定的读取周期尝试进行识别符的读取,因此在伴随着滑动件的移动而滑动件所重叠的负责区域变化了的情况下,对应于滑动件的移动目的地的负责区域的驱动器执行滑动件的驱动。这样,能够对应于滑动件的移动而变更执行滑动件的驱动的驱动器。
18.另外,线性输送机系统也可以构成为,控制装置将控制信号以规定的发送周期向多个驱动器发送,读取周期比发送周期短。在该构成中,能够使执行滑动件的驱动的驱动器
的变更准确地跟随滑动件的移动。
19.另外,线性输送机系统也可以构成为,驱动器在不能由读取部读取识别符的情况下,不进行基于驱动控制部的向线性马达定子的电流供给。在该构成中,能够抑制由于对应于滑动件没有重叠的负责区域的驱动器向线性马达定子执行了电流供给,导致产生不需要的感应磁场而扰乱了滑动件的移动,或者无谓地消耗电力的情况。
20.发明效果
21.根据本发明,能够在对应于多个驱动器的每一个设置了多个负责区域的线性模块中,使对应于滑动件所存在的负责区域的驱动器准确地执行滑动件的驱动。
附图说明
22.图1是示意地表示本发明的线性输送机系统的一例的图。
23.图2是表示本发明的线性模块的一例的立体图。
24.图3是表示局部露出图2的线性模块的内部的立体图。
25.图4是图2的线性模块在y方向的局部剖面图。
26.图5是图2的线性模块在x方向的局部剖面图。
27.图6是表示图1的线性输送机系统所具备的电气构成的框图。
28.图7是表示由主控制器生成的控制信号的图。
29.图8是表示线性驱动器所执行的接收控制的流程图。
30.图9是表示线性驱动器所执行的驱动控制的流程图。
具体实施方式
31.图1是示意地表示本发明的线性输送机系统的一例的图。在图1中标记有具有平行于水平方向的x方向、正交于x方向且平行于水平方向的y方向以及平行于铅垂方向的z方向的xyz正交坐标轴。进一步来讲,x方向的一方侧被标记为x1侧,与x方向的一方侧相反的另一方侧被标记为x2侧。同样的标记在以下的图中也被适当使用。线性输送机系统1具备四台线性模块2。另外在该图中,对于四台线性模块2标记互不相同的标号2a、2b、2c、2d。
32.线性模块2a、2b是固定于线性输送机系统1的设置面的固定线性模块,线性模块2c、2d是相对于设置面能够在y方向上移动的可动线性模块。固定线性模块2a、2b与可动线性模块2c、2d在y方向具有相同的宽度,另一方面,在x方向上具有不同的长度。但是,它们除了在x方向上的长度以外,共同具有使用图2~图5后述的基本构成。
33.两个固定线性模块2a、2b在y方向隔开间隔并且平行于x方向配置。这样排列配置于x方向上的固定线性模块2a、2b在x方向具有相同的长度。另一方面,可动线性模块2c、2d在x方向上具有比固定线性模块2a、2b更短的相同的长度。但是,可动线性模块2c、2d以及固定线性模块2a、2b的尺寸关系不限于该例。
34.该线性输送机系统1具有在y方向上驱动可动线性模块2c、2d的两个致动器5c、5d。致动器5c在固定线性模块2a、2b的x方向的x1侧平行于y方向配置。致动器5d在固定线性模块2a、2b的x方向的x2侧平行于y方向配置。这样,两个致动器5c、5d配置为从x方向夹着两个固定线性模块2a、2b。
35.致动器5c例如是具备平行于y方向的滚珠丝杠的单轴机械手,可动线性模块2c安
装于致动器5c的滚珠丝杠的螺母。该致动器5c沿着可动区域rc在y方向上驱动可动线性模块2c。在此,可动区域rc包括在x方向上从x1侧与固定线性模块2c的x1侧的端部相对的相对范围fca、在x方向上从x1侧与固定线性模块2b的x1侧的端部相对的相对范围fcb,并且是在y方向上延伸的区域。
36.致动器5d例如是具备平行于y方向的滚珠丝杠的单轴机械手,可动线性模块2d安装于致动器5d的滚珠丝杠的螺母。该致动器5d沿着可动区域rd在y方向上驱动可动线性模块2d。在此,可动区域rd包括在x方向上从x2侧与固定线性模块2a的x2侧的端部相对的相对范围fda,在x方向上从x2侧与固定线性模块2b的x2侧的端部相对的相对范围fdb,并且是在y方向上延伸的区域。
37.另外,线性输送机系统1具备用于驱动这样的致动器5c、5d的致动器驱动器50c、50d。致动器驱动器50c通过向致动器5c的电动机供给电流而在y方向驱动线性模块2c,致动器驱动器50d通过向致动器5d的电动机供给电流而在y方向驱动线性模块2d。
38.在这样的线性输送机系统1中能够循环地驱动滑动件4。例如在可动线性模块2c位于相对范围fca内的状态下,通过固定线性模块2a将与之卡合的滑动件4向x方向的x1侧驱动,能够使滑动件4从固定线性模块2a向可动线性模块2c移动。然后,在致动器5c使可动线性模块2c从相对范围fca向相对范围fcb移动之后,位于相对范围fcb内的可动线性模块2c将与之卡合的滑动件4向x方向的x2侧驱动,由此能够使滑动件4从可动线性模块2c向固定线性模块2b移动。
39.进而,在可动线性模块2d位于相对范围fdb内的状态下,固定线性模块2b将与之卡合的滑动件4向x方向的x2侧驱动,由此能够使滑动件4从固定线性模块2b向可动线性模块2d移动。然后,在致动器5d使可动线性模块2d从相对范围fdb向相对范围fda移动之后,位于相对范围fda内的可动线性模块2d将与之卡合的滑动件4向x方向的x1侧驱动,由此能够使滑动件4从可动线性模块2d向固定线性模块2a移动。
40.这样能够逆时针地循环驱动滑动件4。另外,通过执行与上述相反的动作,能够顺时针地循环驱动滑动件4。另外,循环驱动只是在线性输送机系统1能够执行的滑动件4的驱动方式的一个例子,也可以以其他各种各样的方式驱动滑动件4。
41.另外,线性输送机系统1具备统一地控制各线性模块2(2a~2d)、致动器5c、5d的驱动的主控制器10。该主控制器10是具备控制所需要的运算功能的计算机。
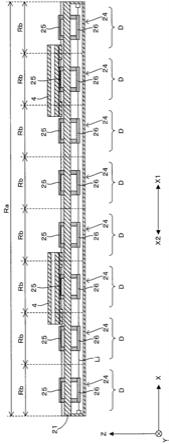
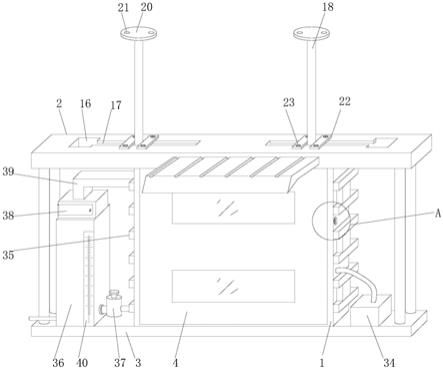
42.图2是表示本发明的线性模块的一例的立体图,图3是表示局部露出图2的线性模块的内部的立体图,图4是图2的线性模块在y方向的局部剖面图,图5是图2的线性模块在x方向的局部剖面图。如上所述,线性模块2a、2b、2c、2d除了x方向的长度以外具备共通的基本构成。因此,在图2~图5中没有特意将它们区分,而表示为线性模块2。
43.在图2及图3中示出了在x方向上延伸设置的线性模块2、从下侧支承线性模块2的基座部件3以及卡合于线性模块2的滑动件4。线性模块2安装于在x方向上等间隔地排列的三个基座部件3的上端。该线性模块2在x方向的全长范围ra上延伸设置(即具有全长范围ra的长度),卡合于线性模块2的滑动件4在该全长范围ra上沿x方向可动。
44.线性模块2具有在x方向延伸设置的基板21。在该例中,基板21由在x方向上排列的两张分割基板211构成。在两张分割基板211中,x1侧的分割基板211架设于三个基座部件3之中的x1侧的端部的基座部件3与中央的基座部件3之间,x2侧的分割基板211架设于三个
基座部件3之中的x2侧的端部的基座部件3与中央的基座部件3之间。构成基板21的模块单元20的个数不限于两个,也可以是一个或者三个以上。进一步来讲,通过变更构成基板21的分割基板211的张数,能够改变线性模块2的长度(全长范围ra)。
45.该基板21从z方向俯视时具有矩形状。在基板21的上表面,与x方向平行的两条导轨22在y方向隔开间隔安装,并且安装有以规定的排列间隔p23在x方向排成一排的多个线性马达定子23。在y方向上,多个线性马达定子23配置于两条导轨22之间。各线性马达定子23是由线圈以及插入该线圈的芯构成的电磁铁。
46.进而,在基板21安装有以规定的排列间距p24在x方向上排成一排的多个(8个)伺服单元24。在y方向上,多个伺服单元24配置于多个线性马达定子23与一条导轨22之间。另外,伺服单元24的排列间距p24比线性马达定子23的排列间距p23更长,并且对应于一个伺服单元24设置多个线性马达定子23。
47.多个伺服单元24的每一个具有安装于基板21的上表面的磁传感器25、以及安装于基板21的下表面的驱动器基板26。磁传感器25是检测滑动件4的x方向的位置的位置传感器。驱动器基板26搭载执行将对应于磁传感器25的检测结果的电流向线性马达定子23供给的反馈控制的电路。
48.在该线性模块2中,全长范围ra以伺服单元24的个数在x方向上被等分,并且设定有伺服单元24的个数的量的负责区域rb。即,全长范围ra被分割成多个负责区域rb,在各负责区域rb配置一个伺服单元24。另外,在各负责区域rb中排列有像上述那样对应于一个伺服单元24设置的多个线性马达定子23。
49.这样,在各负责区域rb中,配置有由一个伺服单元24(换言之为一个磁传感器25和一个驱动器基板26)以及与此对应的多个线性马达定子23构成的一个线性驱动器d,并且在全长范围ra中多个(8个)线性驱动器d以等间隔在x方向上排列。
50.另外,线性模块2具有从上侧覆盖导轨22、线性驱动器d并且在俯视时是矩形状的盖部件27。盖部件27具有在y方向的中央向下方突出的支承腿271,且支承腿271安装于基板21的上表面。在y方向的两端,在盖部件27与基板21之间形成有间隙272。
51.滑动件4具有滑动件壳体40。该滑动件壳体40具有从上侧覆盖线性模块2的盖部件27的上板401、从上板401的y方向的端部向下方延伸设置的侧板402、以及从侧板402的下端经由间隙272进入盖部件27与基板21之间的凸缘403。在凸缘403的下表面安装有卡合部件42,并且该卡合部件42卡合于线性马达定子23。由此,滑动件4的移动由导轨22在x方向上引导。
52.另外,滑动件4具有以与线性马达定子23相对的方式安装于滑动件壳体40的线性马达动子43。该线性马达动子43由永磁铁以及保持该永磁铁的背轭构成。进而,滑动件4具有以与磁传感器25相对的方式安装于滑动件壳体40的磁标尺45。该磁标尺45示出了滑动件4的x方向的位置。
53.该滑动件4能够在x方向上从线性模块2的端部进入到线性模块2的中央侧而卡合于线性模块2的导轨22。另外,滑动件4能够在x方向上从线性模块2的端部向外侧离开而从线性模块2的导轨22脱离。
54.在这样构成的线性模块2中,多个线性驱动器d分担执行滑动件4的驱动。即,各线性驱动器d的线性马达定子23对于重叠于它所配置的负责区域rb的滑动件4的线性马达动
子43能够赋予磁驱动力,另一方面,对于不重叠于该负责区域rb的滑动件4的线性马达动子43不能赋予磁驱动力。因此,多个线性驱动器d负责重叠于全长范围ra中的各自所配置的负责区域rb的滑动件4的驱动。接下来,对于基于线性驱动器d的滑动件4的驱动进行说明。
55.图6是表示图1的线性输送机系统所具备的电气构成的框图,图7是表示由主控制器生成的控制信号的图。如图6所示,主控制器10具备初始处理部11、程序处理部12、命令处理部13、运动控制部14、轴状态管理部15以及通信控制部16。这些中的功能部11~15由主控制器10所具备的cpu(central processing unit:中央处理器)等处理器来实现。
56.初始处理部11在电源接通时执行线性输送机系统1的初始设定。在该初始设定中包括用于识别多个滑动件4的识别符id的设定。即,对于设置于线性输送机系统1的多个滑动件4赋予各自不同的识别符id,这些滑动件4通过识别符id而被识别。并且,在滑动件4的磁标尺45中存储(磁化)有用于识别该滑动件4的识别符id。对于此,初始处理部11一边在多个滑动件4之中变更对象滑动件4一边对所有滑动件4执行如下处理:通过配置于一个对象滑动件4所重叠的负责区域rb的驱动器d的磁传感器25,从对象滑动件4的磁标尺45读取识别符id,并与对象滑动件4建立关联而进行管理。这样,滑动件4的识别符id的设定被执行。另外,识别符id与对多个滑动件4按顺序赋予的轴编号建立关联而进行管理。
57.程序处理部12保存规定各滑动件4的移动的程序。该程序使用例如plc(programmable logic controller:可编程逻辑控制器)等,由用户生成并且安装于程序处理部12。命令处理部13生成使滑动件4以程序所规定的方式移动的移动命令,运动控制部14生成用于使线性驱动器d执行按照由命令处理部13生成的移动命令的滑动件4的移动的指令值(位置指令值cp、速度指令值cv)。
58.这样,生成图7所示的控制信号sc。该控制信号sc将滑动件4的识别符id与对于该滑动件4的位置指令值cp以及速度指令值cv建立对应,并按照每个滑动件4来表示。即,控制信号sc将按照与该识别符id建立了对应的位置指令值cp以及速度指令值cv而驱动由识别符id识别的滑动件4的指令对于多个滑动件4的每一个而表示。另外,指令代码是表示赋予滑动件4的指令的种类的代码。该控制信号sc是将由识别符id、指令代码、位置指令值cp以及速度指令值cv构成的数据按照滑动件4的轴编号的顺序排列而成的信号,并且通过串行通信发送给线性输送机系统1所具备的所有线性驱动器d。
59.轴状态管理部15管理多个滑动件4(轴)的每一个的状态。具体来讲,轴状态管理部15一边在多个滑动件4之中变更对象滑动件4一边对所有滑动件4执行如下处理:通过配置于一个对象滑动件4所重叠的负责区域rb的驱动器d的磁传感器25从对象滑动件4的磁标尺45读取滑动件4的位置(轴状态),并与对象滑动件4建立关联而进行管理。
60.通信控制部16控制主控制器10与线性模块2的线性驱动器d的通信。通过通信控制部16执行控制信号sc向线性驱动器d的发送、从线性驱动器d的轴状态的取得。
61.对于此,各线性驱动器d的驱动器基板26具有初始处理部261、通信控制部262、轴状态管理部263以及伺服控制部264。初始处理部261在电源接通时执行线性驱动器d的初始设定。通信控制部262控制与主控制器10或其他线性驱动器d的通信控制部262的通信。
62.轴状态管理器263管理滑动件4(轴)的位置(状态)。具体来讲,轴状态管理部263使磁传感器25周期性地尝试进行滑动件4的磁标尺45所示的识别符id和位置的读取。并且,在读取成功的情况下,将滑动件4的识别符id和位置建立对应地保存,并且经由通信控制部
262将它们发送给主控制器10。然后,以上述的方式主控制器10的轴状态管理部15管理它们。
63.伺服控制部264对于重叠于负责区域rb的滑动件4的驱动执行伺服控制。即,伺服控制部264基于从主控制器10接收的位置指令值cp以及速度指令值cv与通过磁传感器25读取的滑动件4的位置以及速度之间的偏差,通过控制向线性马达定子23供给的电流的伺服控制来驱动滑动件4。
64.另外,设置于线性输送机系统1的多个线性驱动器d被串行地连接。具体来讲,如图1的虚线所示,线性模块2d、线性模块2b、线性模块2a以及线性模块2c以这个顺序通过配线lo被串行地连接。另外,在各线性模块2中,如图5所示,各线性驱动器d通过配线li被串行地连接。对于此,主控制器10不区分各个线性驱动器d而对串行连接多个线性驱动器d的配线路径lo、li发送对各线性驱动器d共通的控制信号sc(图7)。由此,控制信号sc按顺序通过多个线性驱动器d。另一方面,各线性驱动器d基于接收的控制信号sc执行滑动件4的驱动。这样的接收控制以及驱动控制的详细情况如下所述。
65.图8是表示线性驱动器所执行的接收控制的流程图。另外,由于多个线性驱动器d的每一个均共通地执行图8的流程图,所以在此将一个线性驱动器d作为代表来进行接收控制的说明。
66.在步骤s101中,通信控制部262确认是否从主控制器10的轴状态管理部15接收了控制信号sc。从主控制器10的控制信号sc的发送以规定的发送周期ts执行。并且,当接收到控制信号sc时(在步骤s101为“是”),该控制信号sc被保存到伺服控制部264的存储器(步骤s102)。由此,每当接收到控制信号sc时,保存在初始处理部261的控制信号sc都被更新。
67.图9是表示线性驱动器所执行的驱动控制的流程图。另外,由于多个线性驱动器d的每一个均共通地执行图9的流程图,所以在此将一个线性驱动器d作为代表来进行驱动控制的说明。
68.在步骤s201中,轴状态管理部263确认是否经过了规定的读取周期tr。另外,读取周期tr比发送周期ts短。并且,当经过读取周期tr时(在步骤s201为“是”),轴状态管理部263使磁传感器25尝试进行从滑动件4的识别符id的读取(步骤s202)。在步骤s203中,轴状态管理部263确认识别符id的读取是否成功。
69.在任一滑动件4均不重叠于相应的线性驱动器d所对应的负责区域rb的情况下,不存在与配置于该负责区域rb的磁传感器25相对的磁标尺45。其结果是,不能读取识别符id(在步骤s203为“否”)而返回步骤s201。另一方面,在任一滑动件4重叠于相应的线性驱动器d所对应的负责区域rb的情况下,该滑动件4的磁标尺45与配置于该负责区域rb的磁传感器25相对。其结果是,从该滑动件4的识别符id的读取成功(在步骤s203为“是”)。
70.在这样成功读取识别符id时,伺服控制部264从在步骤s102中保存的控制信号sc读出与由轴状态管理部263读取的识别符id对应的位置指令值cp以及速度指令值cv(步骤s204)。并且,伺服控制部264基于位置指令值cp以及速度指令值cv与由磁传感器25读取的滑动件4的位置以及速度之间的偏差,而通过反馈控制(伺服控制)来控制向线性马达定子23供给的电流(步骤s205)。由此,执行按照位置指令值cp以及速度指令值cv的滑动件4的驱动。在线性驱动器d中,在每个读取周期tr均执行该处理。
71.在以上说明的实施方式中,用于识别滑动件4的识别符id被赋予该滑动件4。对于
此,发送给多个线性驱动器d的控制信号sc将对于滑动件4的位置指令值cp以及速度指令值cv与该滑动件4的识别符id建立对应地表示(图7)。并且,线性驱动器d从重叠于这一负责区域rb的滑动件4读取用于识别该滑动件4的识别符id(步骤s202、s203),并将对应于通过控制信号sc而与该识别符id建立了对应的位置指令值cp以及速度指令值cv的电流向线性马达定子23供给(步骤s204、s205)。即,多个线性驱动器d中的对应于滑动件4所重叠的负责范围rb的线性驱动器d从滑动件4读取识别符id,并按照与该识别符id建立了对应的位置指令值cp以及速度指令值cv来驱动滑动件4。这样,能够使对应于滑动件4所存在的负责区域rb的线性驱动器d准确地执行滑动件4的驱动。
72.这样,线性驱动器d在读取了来自滑动件4的识别符id的情况下,自主地判断自身负责滑动件4的驱动,并对滑动件4执行伺服控制。因此,主控制器10不需要判断使多个线性驱动器d中的哪一个线性驱动器d控制滑动件4的驱动,只要生成并发送对于滑动件4的位置指令值cp以及速度指令值cv即可。
73.另外,主控制器10向多个线性驱动器d发送相同的控制信号sc(图7)。在该构成中,主控制器10生成包括作为控制的对象的滑动件4的识别符id与位置指令值cp以及速度指令值cv的控制信号sc,只需将该控制信号sc发送给多个线性驱动器d,就能够使对应于滑动件4所存在的负责区域rb的线性驱动器d准确地驱动该滑动件4。即,并不是从多个线性驱动器d中确定应该执行滑动件4的驱动的线性驱动器d并对它发送位置指令值cp以及速度指令值cv这样的控制,而是通过对多个线性驱动器d一齐发送控制信号sc这样的简单的控制,就能够适当地驱动滑动件4。
74.另外,在线性输送机系统1中具备多个线性驱动器d,使用多个线性驱动器d而能够单独地驱动多个滑动件4。另外,各滑动件4的磁标尺45存储用于识别多个滑动件4的每一个的识别符id。并且,控制信号sc将对于滑动件4的位置指令值cp以及速度指令值cv与作为这些指令值cp、cv的对象的滑动件4的识别符id建立对应,并对于每个滑动件4表示(图7)。在该构成中,对于多个滑动件4的每一个,生成将该滑动件4的指令值cp、cv与识别符id建立对应而表示的控制信号sc并发送给多个线性驱动器d,由此能够准确地驱动多个滑动件4的每一个。
75.另外,线性驱动器d以规定的读取周期tr尝试进行基于磁传感器25的识别符id的读取(步骤s201、s202)。并且,将对应于通过控制信号sc而与读取成功的识别符id建立了对应的位置指令值cp以及速度指令值cv的电流由驱动器基板26向线性马达定子23供给(步骤s204、s205)。在该构成中,由于各线性驱动器d以规定的读取周期tr尝试进行识别符id的读取,因此在伴随着滑动件4的移动而滑动件4所重叠的负责区域rb变化了的情况下,对应于滑动件4的移动目的地的负责区域rb的线性驱动器d执行滑动件4的驱动。这样,能够对应于滑动件4的移动而变更执行滑动件4的驱动的线性驱动器d。
76.另外,与主控制器10向多个线性驱动器d发送控制信号sc的发送周期ts相比,读取周期tr更短。在该构成中,能够使执行滑动件4的驱动的线性驱动器d的变更准确地跟随滑动件4的移动。
77.另外,线性驱动器d在不能由磁传感器25读取识别符id的情况下(在步骤s203为“否”的情况下),不进行由驱动器基板26向线性马达定子23的电流供给。在该构成中,能够抑制由于对应于滑动件4没有重叠的负责区域rb的线性驱动器d向线性马达定子23执行了
电流供给,导致产生不需要的感应磁场而扰乱了滑动件4的移动,或者无谓地消耗电力的情况。
78.这样,在本实施方式中,线性输送机系统1相当于本发明的“线性输送机系统”的一例,主控制器10相当于本发明的“主控制装置”的一例,线性模块2相当于本发明的“线性模块”的一例,线性马达定子23相当于本发明的“线性马达定子”的一例,磁传感器25相当于本发明的“读取部”的一例,驱动器基板26相当于本发明的“驱动控制部”的一例,滑动件4相当于本发明的“滑动件”的一例,线性马达动子43相当于本发明的“线性马达动子”的一例,磁标尺45相当于本发明的“存储部”的一例,位置指令值cp以及速度指令值cv相当于本发明的“驱动指令”的一例,线性驱动器d相当于本发明的“驱动器”的一例,识别符id相当于本发明的“识别符”的一例,负责区域rb相当于本发明的“负责区域”的一例,控制信号sc相当于本发明的“控制信号”的一例,读取周期tr相当于本发明的“读取周期”的一例,发送周期ts相当于本发明的“发送周期”的一例,x方向相当于本发明的“驱动方向”的一例。
79.另外,本发明不限于上述实施方式,只要不脱离其主旨,就可以对上述实施方式进行各种变更。例如,各线性驱动器d在每次接受到控制信号sc时都会保存
·
更新它(图7)。然而,也可以是,各线性驱动器d在滑动件4重叠于其负责区域rb的情况下保存
·
更新控制信号sc,另一方面,在滑动件4不重叠于其负责区域rb的情况下不进行控制信号sc的保存
·
更新。
80.另外,也可以适当变更线性模块2的个数或配置。
81.另外,线性输送机系统1中的滑动件4的驱动方式不限于循环驱动,也可以是在规定的方向上直线地驱动滑动件4的直线驱动。
82.也可以变更线性模块2或滑动件4的具体构成,例如形状或者尺寸等。
83.另外,从滑动件4的识别符id的读取也可以不通过磁而通过光或者电进行。
84.标号说明
[0085]1…
线性输送机系统
[0086]
10
…
主控制器(主控制装置)
[0087]2…
线性模块
[0088]
23
…
线性马达定子
[0089]
25
…
磁传感器(读取部)
[0090]
26
…
驱动器基板(驱动控制部)
[0091]4…
滑动件
[0092]
43
…
线性马达动子
[0093]
45
…
磁标尺(存储部)
[0094]
cp
…
位置指令值(驱动指令)
[0095]
cv
…
速度指令值(驱动指令)
[0096]
d
…
线性驱动器(驱动器)
[0097]
id
…
识别符
[0098]
rb
…
负责区域
[0099]
sc
…
控制信号
[0100]
tr
…
读取周期
[0101]
ts
…
发送周期
[0102]
x
…
x方向(驱动方向)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。