1.本发明涉及激光通信领域,具体涉及一种层映射光空间分集联合调制激光通信编解码方法。
背景技术:
2.激光通信兼顾了微波通信与光纤通信的优点,它具有能量集中、传播距离远、既不需要铺设大量的光纤又能够保证大容量信息传输的优势。随着用户终端在通信领域高性能的飞速发展,高速率和高频谱效率一直是无线光通信(woc)领域追求的目标,而在满足高效传输要求时可靠性会随之降低,包括大气湍流以及恶劣天气等对误码性能产生直接的影响。
3.在传统单调制技术上,脉冲位置调制(ppm)利用脉冲位置来传递信息,虽然传输速率较低,但能量利用率随调制阶数升高而大幅提升,从而降低设备平均发射功率。脉冲幅度调制(pam)是一种具有高频谱效率的调制技术,但受限于阶数升高对硬件设备的分辨率要求,而且会产生更高的峰均功率导致发射器工作在非线性领域,造成误码性能降低。为了合理利用空间带宽资源,人们提出了光空间调制(osm)概念,即每条链路在空间域上独立发送信息,而且链路本身承载着信息。将优势突出的调制技术进行融合编码,充分发挥空间多发多收的效力,也通过多路复用的方式提高了通信的有效性。
4.本发明提供一种层映射光空间分集联合调制激光通信编解码方法,通过空间映射与复用技术,采用分集系统结构,结合pam的高频谱特性以及ppm的高能量利用率的特性不仅在功耗方面能够降低光设备平均发射功率,同时也能在提高误码性能的基础上有效地利用频谱资源来提升频谱效率以及传输速率。利用层映射协议构建一种与合作方之间的安全保密通信机制,从而能够降低信息被敌方破译的风险。
技术实现要素:
5.本发明所要解决的技术问题是现有技术中存在的频谱效率以及传输速率低技术问题。提供一种新的层映射光空间分集联合调制激光通信编解码方法,该层映射光空间分集联合调制激光通信编解码方法具有光设备平均发射功率、有效地利用频谱资源来提升频谱效率以及传输速率、保密性强的特点。
6.为解决上述技术问题,采用的技术方案如下:
7.一种层映射光空间分集联合调制激光通信编解码方法,所述层映射光空间分集联合调制激光通信编解码方法包括编码方法和解码方法,编码方法和解码方法相对应,编码方法包括:
8.步骤1,建立层映射协议,根据层映射协议将待传输的n比特二进制数据进行层映射,层映射包括ppm映射和pam映射,ppm映射映射后进行m
‑
ppm调制得到ppm脉冲,m为ppm调制阶数;pam映射后进行l
‑
pam调制得到pam脉冲,l为pam调制阶数;
9.步骤2,采用脉冲幅度位置判决方法融合ppm脉冲和pam脉冲,得到ppam脉冲,ppam
脉冲包含幅度信息和位置信息;
10.步骤3,利用osm映射将ppam脉冲映射至对应索引号激光器,采用受ppam脉冲激活的激光器进行传输具有位置与幅度的信息,关键技术是利用被激活的激光器发送一个与映射编码对应的光脉冲来代表幅度信息同时也代表位置信息。
11.本发明的工作原理:本发明通过空间映射与复用技术,采用分集系统结构,结合pam的高频谱特性以及ppm的高能量利用率的特性,同时采用pam与ppm的联合调制方法,不仅在功耗方面能够降低光设备平均发射功率,同时也能在提高误码性能的基础上有效地利用频谱资源来提升频谱效率以及传输速率。利用层映射协议构建一种与合作方之间的安全保密通信机制,从而能够降低信息被敌方破译的风险。
12.上述方案中,为优化,进一步地,层映射包括预定义位数为2的比特二进制数据分配为一组数据;对分组的数据组数编号,序号为奇数的数据进行ppm映射,序号为偶数的数据采用pam映射;或序号为偶数的数据进行ppm映射,序号为奇数的数据采用pam映射。
13.进一步地,步骤2还包括字节组帧,字节组帧根据预设的组帧协议对字节进行分配,得到多组包含帧头与数据的帧信号。
14.进一步地,每组帧信号之间插入一个默认不发送任何脉冲的空时隙作为保护段。
15.进一步地,osm映射采用多激光器发送,对应的解码时的osm解映采用同样多的激光接收机对应进行收集;osm映射对激光器进行索引编号,预定义osm映射关系,将ppam脉冲映射到对应位置的激光器完成对应幅度的激光器激活,发送激光。
16.进一步地,所述解码方法包括:
17.步骤4,通过osm解映射;
18.步骤5,对ppam脉冲进行解映射,得到ppm脉冲和pam脉冲;
19.步骤6,根据层映射协议,将ppm脉冲和pam脉冲组合为二进制比特流,解码完成。
20.进一步地,步骤5中采用联合解码方法,采用联合解码方法是根据激光器的索引号信息还原对应的pam比特序列完成pam识别,采用识别脉冲所在一帧信号中的时隙位置还原对应的ppm比特序列完成ppm识别。
21.进一步地,联合解码方法还包括采用双边沿检测方法来识别激光器的索引号及对应光脉冲所在的时隙位置;双边沿检测方法同时检测脉冲上升沿与下降沿的数量,通过边沿计数结果判断pam及ppm的帧头脉冲有效性;双边沿检测方法还对每个上升沿与下降沿之间的脉冲持续时间进行计数,滤除持续时间不满足预定义时间阈值的脉冲,仅对滤除后的脉冲进行ppm识别和pam识别。既判断pam信号是否发生串扰或者丢失,同时判断ppm信号时隙位置是否发生错位。
22.进一步地,联合解码方法还包括:ppm识别和pam识别之间建立反馈协议,即将pam帧头识别的结果送入到脉冲位置判决模块,同时将ppm帧头识别的结果送入到激光器序号识别模块,只有两种帧头信号均识别正确时才进行信息还原。这是为了提高信息识别的准确性。
23.对于一个n比特二进制数据,由分层处理得到比特块b1、b2,其中b1对应l
‑
pam,携带的比特数为l为pam调制阶数;b2对应m
‑
ppm,携带的比特数为m为ppm调制阶数,因此每次发光所携带的数据量为l
‑
pam的映射关系可通过一个m*1维向量xl表示,
x
l
=[0
102
···
a
l
···0m
]t;其中a
l
表示l
‑
pam调制符号发送的光强,a
l
=lδ,δ为优先增量符号,δ=2/(l 1);l表示在该时隙位置发送l
‑
pam信号,l=1,2,
…
l,[
·
]
t
表示转置运算。m
‑
ppm的映射关系可通过一个1*m维向量x
m
表示,x
m
=[0102
···
sm
···0m
];其中s
m
表示m
‑
ppm调制符号发送的平均光强,m表示在该时隙位置发送m
‑
ppm信号。
[0024]
经融合后的信号可用矩阵x表示:
[0025][0026]
其中,a
l
s表示最终激活激光器发射的光强,所在行表示信号所映射的特定激光器序号[
12
···
l]
t
,列表示信号脉冲对应的时隙位置。
[0027]
本发明采用多发多收机制,可根据实际需求设计不同阵列分集形式和工作机制。以4
×
4阵列收发形式,即两种调制阶数均为4阶为例进行说明。4
‑
pam编码规则,映射模块按照比特流码字的不同分为4个幅度高低变化的脉冲信号,其中四种比特组合(00,01,10,11)对应四种幅度(v1,v2,v3,v4),每种幅度映射到特定的发送链路序号(1,2,3,4)。依据4
‑
ppm编码规则,映射模块则根据比特流码字排序划分为4个时隙位置,并将比特块映射为4个时隙中位置与信息对应的脉冲。
[0028]
信息传输开始时,每帧采用一个帧头作为信息的引导,只有在帧头检测无误的情况下才对尾随的信息帧进行识别。字节组帧中最简单的方式是将一个帧头匹配一个字节,组成一帧信号。
[0029]
在层解映射中,将还原的信息按照发送端的层映射协议进行比特序列组合,最终完成二进制信息的解调译码。
[0030]
本发明的有益效果:本发明利用激光通信技术构建空间多发多收传输机制,在空域上,通过光空间映射提高空间复用增益,在时域上,通过时分复用技术(tdm)结合pam的高频谱效率与ppm的高能量利用率,实现脉冲位置幅度调制(ppam)来共同传递信息。本专利技术在传统ppm脉冲基础上融合多种幅度脉冲,采用分集系统结构,在提高频谱效率同时提高传信率。在无线传输方式上以激光器索引号来代替传统pam调制符号,克服了调制阶数升高对硬件设备的分辨率要求高的问题。同时利用多种调制技术组合复用有利于信息的安全传输,降低通信第三方对信息截获破译概率,采用字节组帧可缩短同步时间,进一步提高了信息传输可靠性和有效性,在多个领域均有重要的参考和应用价值。
附图说明
[0031]
下面结合附图和实施例对本发明进一步说明。
[0032]
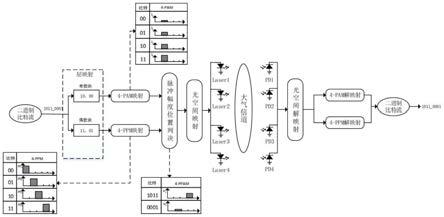
图1,实施例1的4
×
4光空间分集联合调制编解码方法示意图。
[0033]
图2,实施例1的联合调制编码帧格式示意图。
[0034]
图3,实施例1的光空间联合调制编解码的(4,4)
‑
ppam实际传输波形图。
具体实施方式
[0035]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明
进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0036]
实施例1
[0037]
本实施例提供一种层映射光空间分集联合调制激光通信编解码方法,所述层映射光空间分集联合调制激光通信编解码方法包括编码方法和解码方法,编码方法和解码方法相对应,编码方法包括:
[0038]
步骤1,建立层映射协议,根据层映射协议将待传输的n比特二进制数据进行层映射,层映射包括ppm映射和pam映射,ppm映射映射后进行m
‑
ppm调制得到ppm脉冲,m为ppm调制阶数;pam映射后进行l
‑
pam调制得到pam脉冲,l为pam调制阶数;
[0039]
步骤2,采用脉冲幅度位置判决方法融合ppm脉冲和pam脉冲,得到ppam脉冲,ppam脉冲包含幅度信息和位置信息;
[0040]
步骤3,利用osm映射将ppam脉冲映射至对应索引号激光器,采用受ppam脉冲激活的激光器进行传输具有位置与幅度的信息,关键技术是利用被激活的激光器发送一个与映射编码对应的光脉冲来代表幅度信息同时也代表位置信息。
[0041]
如图1,在每组数据中分别对每个字符进行联合编码调制,每个字符对应8bit信息,第一个字符信息由高位到低位顺序可表示为:
[0042]
b1=[b8,b7,b6,b5,b4,b3,b2,b1]。
[0043]
分别对每个字节进行分层处理。具体地,层映射包括预定义位数为2的比特二进制数据分配为一组数据;对分组的数据组数编号,序号为奇数的数据进行ppm映射,序号为偶数的数据采用pam映射;或序号为偶数的数据进行ppm映射,序号为奇数的数据采用pam映射。
[0044]
在层映射中,以两位二进制比特分配为一组,并对每组数据进行编号。每组比特以层映射的方式分配到不同的层,其中编号为奇数的数组被分配到pam模块,编号为偶数的数组被分配到ppm模块,每个模块依据特定的调制方式处理二进制比特流。
[0045]
b1中为奇数块的[b8,b7]和[b4,b3]分别对应图1中比特块(10,00),在进行4
‑
pam调制过程中,依据比特信息内容分别输出与信息对应的幅度(v3,v1)。
[0046]
b1中为偶数块的[b6,b5]和[b2,b1]分别对应图1中比特块(11,01),在进行4
‑
ppm调制过程中,依据比特信息分别映射为第四以及第二个时隙产生的脉冲。
[0047]
当pam模块每激活一次发送链路,ppm模块对应产生一个特定时隙的脉冲,因此每个字节对应发送两个携带位置信息且对应发送链路序号特定的ppam脉冲。在脉冲幅度及位置判决中,将两种调制好的信号融合,得到包含不同幅度且携带位置信息的脉冲串行复用信号。
[0048]
优选地,步骤2还包括字节组帧,字节组帧根据预设的组帧协议对字节进行分配,得到多组包含帧头与数据的帧信号。是为了提高同步效率。
[0049]
如图2所示,在每帧信号格式中,最前端波形为帧头脉冲,信息脉冲尾随帧头脉冲触发,待第一个信息发送完成时,发送第二个帧头脉冲及信息脉冲,以此重复。
[0050]
优选地,每组帧信号之间插入一个默认不发送任何脉冲的空时隙作为保护段。这是为了防止各脉冲之间脉冲重合造成码间串扰以及方便解调端进行边沿检测,持续时间根据实际系统性能自由设定,以此提高接收机检测脉冲信号的可靠性能。
[0051]
具体地,每个激光器具有固定的索引号,每个索引号对应特定的调制符号,依据osm映射关系,将融合编码复用的脉冲映射到特定激光器发送。在osm解映射中,将接收机阵列按照与发送端索引号匹配的对应关系放置,且采用一对一接收的方式进行光信号采集,信号经由osm解映射模块识别出被激活的激光器索引号,同时将多路信号融合为单路携带激光器索引号信息且各脉冲位置变化的信号,并将该信号同时送入对应的pam和ppm解调模块进行解调,依据索引号信息还原pam对应的比特块,依据各脉冲所在的时隙位置还原ppm对应的比特块。
[0052]
具体地,所述解码方法包括:
[0053]
步骤4,通过osm解映射;
[0054]
步骤5,对ppam脉冲进行解映射,得到ppm脉冲和pam脉冲;
[0055]
步骤6,根据层映射协议,将ppm脉冲和pam脉冲组合为二进制比特流,解码完成。
[0056]
具体地,步骤5中采用联合解码方法,采用联合解码方法是根据激光器的索引号信息还原对应的pam比特序列完成pam识别,采用识别脉冲所在一帧信号中的时隙位置还原对应的ppm比特序列完成ppm识别。
[0057]
具体地,联合解码方法还包括采用双边沿检测方法来识别激光器的索引号及对应光脉冲所在的时隙位置;双边沿检测方法同时检测脉冲上升沿与下降沿的数量,通过边沿计数结果判断pam及ppm的帧头脉冲有效性;双边沿检测方法还对每个上升沿与下降沿之间的脉冲持续时间进行计数,滤除持续时间不满足预定义时间阈值的脉冲,仅对滤除后的脉冲进行ppm识别和pam识别。
[0058]
既判断pam信号是否发生串扰或者丢失,同时判断ppm信号时隙位置是否发生错位。
[0059]
在联合编码中,本实施例是按照模块间并行、模块内串行的处理方式将各比特信息映射到特定的时隙中去。
[0060]
为了保证实际传输可靠性以及帧信号同步,可在读取每个地址存储的数据前添加一个自相关性良好的巴克码作为帧头。其中,帧头数据可选用0111_0010组成两个不同幅度且不同时隙位置的帧头脉冲,完成引导与数据信息组帧。
[0061]
图3中,
①
为实施例的联合调制实验传输编码的信号波形,发射端按照每组2个字符的发送方式进行传输;其中,每个短帧包含4个幅度与位置变化的脉冲。pam与ppm调制阶数均为4阶,每个脉冲宽度及时隙持续时间默认为1ms。
[0062]
经过接收端还原后的信号波形如图3中
②
所示,实际无线传输信号延迟时间约为1us,由图中波形可知各脉冲均保留了幅度与位置变化的特性,即每个数据脉冲同时隐藏了幅度和位置信息,且进行复用传输。
[0063]
数据波形
①
与
②
分别对应字符m与8,4
‑
pam的四种发送幅度值分别对应为1v,2v,3v,5.5v,各数据脉冲所在的时隙位置对应4
‑
ppm信息。
[0064]
波形中每个脉冲分别携带2bit的pam信号以及2bit的ppm信号,其中最前端两个脉冲为帧头脉冲,对应巴克码信息0111_0010,其中帧头
①
中第一个脉冲携带的信息为高四位的0111,第二个脉冲携带的信息为低四位的0010,因此帧头对应两个幅度固定为2v、1v的脉冲。数据
①
两个脉冲传输的字符为m(0110_1101),幅度分别为2v、5.5v,脉冲所在位置分别为ppm时隙中第3个时隙及第2个时隙。
[0065]
在每个短帧中,为了达到既可降低码间串扰,又方便对脉冲进行边沿检测的目的,在包含ppam脉冲的4个时隙结束后默认再发送4个空时隙,期间不发送任何信号,待4个时隙时间结束,继续发送4个包含ppam脉冲的时隙,依次重复。因此帧头两个脉冲幅度均固定为2v、1v,两个脉冲间隔时间固定为6ms。待两个数据脉冲传输完成后,继续传输帧头脉冲进行下一轮信息的发送,依次重复。
[0066]
为了提升通信频谱效率,可适当增加pam调制阶数,但在实现方式上需要配备更多的发送链路,因此会增加硬件复杂度。
[0067]
在能够保障一定误码的前提下可适当缩短每个时隙持续时间,提高通信速率。
[0068]
为了降低功耗,在通信速率不限的情况下,可适当增加ppm调制阶数,提高设备的功率利用率。
[0069]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员能够理解本发明,但是本发明不仅限于具体实施方式的范围,对本技术领域的普通技术人员而言,只要各种变化只要在所附的权利要求限定和确定的本发明精神和范围内,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。