技术特征:
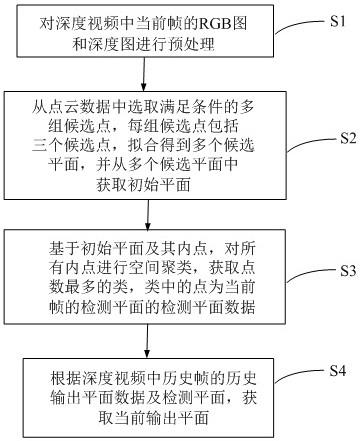
1.一种深度视频空间平面检测方法,其特征在于,包括如下步骤:s1:对深度视频中当前帧的rgb图和深度图进行预处理,以得到所述当前帧的点云数据及位姿信息;s2:从所述点云数据中选取满足如下方程的多组候选点,每组候选点包括三个候选点p1、p2及p3,拟合得到多个候选平面,并从所述多个候选平面中获取初始平面p;其中,,r1、r2及r3分别是预设限值;s3:基于所述初始平面p及其内点p
i
,对所有内点p
i
进行空间聚类,获取点数最多的类,所述类中的点为所述当前帧的检测平面的检测平面数据;s4:根据所述深度视频中历史帧的历史输出平面数据及所述检测平面,获取当前输出平面。2.根据权利要求1所述的深度视频空间平面检测方法,其特征在于,s2具体为:s21:从所述点云数据中选取满足如下方程的多组候选点,每组候选点包括三个候选点p1、p2及p3;;s22:针对多组候选点拟合得到多个候选平面;s23:针对多个候选平面中每个,遍历所述点云数据,获取所述候选平面上的内点;s24:选择内点数量最多的内点所属的候选平面为初始平面p。3.根据权利要求1所述的深度视频空间平面检测方法,其特征在于,s3中对所有内点p
i
进行空间聚类,具体为:s31:在初始平面p中选择一点作为初始类的中心点p
ci
,半径b
i
为预设初始半径;s32:遍历初始平面p上内点,计算所遍历点p
k
与各中心点p
ci
的距离s;s33:判断s的大小,若s位于第一预设范围内,则将p
k
聚类至中心点p
ci
所属的类中;若s位于第二预设范围内,则将p
k
聚类至中心点p
ci
所属的类中,且采用如下公式更新中心点p
ci
和半径b
i
;若s位于第三预设范围内,则构建新类,并将p
k
作为所述新类的中心点p
ci
,且设定所述新类的半径b
i
为所述预设初始半径;为所述预设初始半径;其中为的归一化向量,所述第一预设范围、第二预设范围及第三预设范围依次增大;
s34:是否遍历完所述初始平面p上的内点,若否,返回s32,若是,结束。4.根据权利要求3所述的深度视频空间平面检测方法,其特征在于,所述初始类的中心点p
ci
能够采用如下方程计算:,其中n表示初始平面p上内点p
i
的数量。5.根据权利要求3所述的深度视频空间平面检测方法,其特征在于,所述第一预设范围为[0,0.5m],第二预设范围为[0.5m,0.8m],第三预设范围为[0.8m, ∞)。6.根据权利要求3所述的深度视频空间平面检测方法,其特征在于,s4具体为:s41:根据所述位姿信息,对所述检测平面数据进行配准处理,以获得所述当前帧的所述检测平面在世界坐标系下的平面点数据;s42:至少选择所述平面点数据中不共线的三个点,拟合在世界坐标系下的平面;s43:在所述世界坐标系下,判断所述当前帧的所述平面与所述历史帧的历史输出平面是否为同一个平面,若是,以将合并后的平面作为当前输出平面,若否,则将所述平面作为当前输出平面。7.根据权利要求6所述的深度视频空间平面检测方法,其特征在于,所述s43具体为:s431:在所述世界坐标系下,判断所述平面与所述历史输出平面之间的法向量之间的夹角是否小于第一阈值、所述平面的平面中心点距所述历史输出平面的距离是否小于第二阈值、以及所述平面的平面中心点和所述历史输出平面的平面中心点之间的距离是否小于两者的半径之和;s432:若均是,则将所述平面与所述历史输出平面合并,以将合并后的平面作为当前输出平面,否则,则将所述平面作为当前输出平面。8.根据权利要求7所述的深度视频空间平面检测方法,其特征在于,还会更新合并后的平面的平面中心点和半径。9.根据权利要求8所述的深度视频空间平面检测方法,其特征在于,采用如下方式更新合并后的平面的平面中心点和半径:,,其中n表示合并后的平面上、在世界坐标系下的内点的数量;表示遍历合并后的平面上内点的第一个点。10.一种深度视频空间平面检测系统,其特征在于,包括:预处理模块,其用于对深度视频中当前帧的rgb图像和深度图像进行预处理,以获取当前帧的点云数据和位姿信息;第一获取模块,其根据所述点云数据选取满足如下方程的多组候选点,每组候选点包括三个候选点p1、p2及p3,拟合得到多个候选平面,并从所述多个候选平面中获取初始平面p,
其中,,r1、r2及r3分别是预设限值;第二获取模块,对所有内点pi进行空间聚类,获取点数最多的类,所述类中的点为所述当前帧的检测平面的检测平面数据;帧间处理模块,其根据所述深度视频中历史帧的历史输出平面数据及所述检测平面,获取当前输出平面。
技术总结
本发明公开了深度视频空间平面检测方法及系统,该方法包括:对深度视频中当前帧的RGB图和深度图进行预处理;从点云数据中选取满足条件的多组候选点,每组候选点包括三个候选点,拟合得到多个候选平面,并从多个候选平面中获取初始平面;基初始平面及其内点,对所有内点进行空间聚类,获取点数最多的类,类中的点为当前帧的检测平面的检测平面数据;根据历史输出平面数据及检测平面,获取当前输出平面。本发明能够快速检测平面,效率高且稳定性好。好。好。
技术研发人员:魏杰科 牟文杰 蔡宝军 邵京
受保护的技术使用者:青岛影创信息科技有限公司
技术研发日:2021.10.29
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。