1.本技术涉及医疗器械领域,特别是涉及一种股骨截骨导板组件及其模型的构建方法。
背景技术:
2.数字化骨科以骨科临床为基础,基于患者医学影像数据,结合计算机图像处理技术,进行患者骨模型重建与术前手术方案的个性化设计;基于重建骨模型结合3d打印技术,设计并打印手术导板,用于术中定位、导向,完成个性化手术方案的术中实现。
3.然而,对于股骨近端的截骨导板,目前以引导截骨为主,截骨后,原始股骨的中心位置丢失,医生在术中缺少股骨头中心位置作为引导信息,从而影响医生假体型号的选择及假体植入位置的判断。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本技术的目的在于提供一种股骨截骨导板组件及其模型的构建方法,用于解决现有技术中的问题。
5.为实现上述目的及其他相关目的,本技术一方面提供一种股骨截骨导板组件模型的构建方法,包括:提供股骨三维模型,所述股骨三维模型包括截骨线,所述截骨线自股骨颈下缘靠近小转子的一侧延伸至股骨颈下缘靠近大转子的一侧;
6.获取截骨引导面,基于截骨线向垂直于股骨颈表面并远离股骨颈表面的方向延伸形成截骨引导面;
7.获取导板贴合面,所述导板贴合面为自截骨线沿股骨颈表面向股骨头方向延伸所形成的贴合面;基于导板贴合面向远离股骨颈表面的方向延伸,获得构建截骨导板本体模型;
8.获取定位部,在所述截骨导板本体模型外表面构建向远离股骨颈表面的方向突起的定位部;
9.获取旋转基准部,基于所述定位部确认三角定位模型的旋转中心作为旋转基准部;基于所述旋转基准部延伸至大转子尖端构建第一指引面;基于所述旋转基准部延伸至小转子尖端构建第二指引面;基于所述旋转基准部延伸至股骨头中心位置构建第三指引面;基于所述第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸形成三角定位模型。
10.在本技术的一些实施方式中,所述截骨线包括第一截骨线和第二截骨线,所述第一截骨线自股骨颈下缘靠近小转子尖端的一侧延伸至大转子内侧梨状窝;所述第二截骨线自大转子内侧梨状窝为起点、与第一截骨线呈钝角延伸至股骨颈下缘靠近大转子尖端的一侧。
11.在本技术的一些实施方式中,截骨引导面包括第一截骨引导面和第二截骨引导面;基于第一截骨线向远离股骨颈表面的方向延伸形成第一截骨引导面;基于第二截骨线
向远离股骨颈表面的方向延伸形成第二截骨引导面。
12.在本技术的一些实施方式中,在所述第一指引面上构建用指引大转子尖端的第一指引孔。
13.在本技术的一些实施方式中,在所述第二指引面上构建用于指引小转子尖端的第二指引孔。
14.在本技术的一些实施方式中,在所述第三指引面上构建用于指引股骨头中心位置的第三指引孔。
15.在本技术的一些实施方式中,在所述旋转基准部构建与定位部相匹配的定位孔,用于套设所述三角定位模型。
16.在本技术的一些实施方式中,所述第一截骨引导面的延伸方向和第二截骨引导面的延伸方向的夹角为钝角,所述钝角为100
°
~120
°
。
17.在本技术的一些实施方式中,所述导板贴合面自截骨线沿股骨颈表面向股骨头方向延伸的距离为8mm~15mm。
18.在本技术的一些实施方式中,基于所述第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸的距离为2.5mm~6mm。
19.本技术另一方面提供一种股骨截骨导板组件的制备方法,所述方法包括:根据本技术所述的股骨截骨导板组件模型的构建方法构建获得的股骨截骨导板组件模型,制备股骨截骨导板组件。
20.本技术另一方面提供一种股骨截骨导板组件,由本技术所述的股骨截骨导板组件模型的构建方法构建获得、或由本技术所述的股骨截骨导板组件的制备方法制备获得。
21.一种股骨截骨导板组件,所述股骨截骨导板组件包括贴合股骨颈表面的截骨导板本体,所述截骨导板本体包括导板贴合面,所述截骨导板本体上设有沿截骨线延伸的截骨引导部,所述截骨导板本体上还设有定位部;还包括三角定位导板,所述三角定位导板设有与所述定位部相配合的连接部、用于定位大转子尖端的有第一指引臂、用于定位小转子尖端的第二指引臂、用于定位股骨头中心位置的第三指引臂。
22.本技术另一方面提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如本技术所述的股骨截骨导板组件模型的构建方法的步骤、或如本技术所述的股骨截骨导板组件的制备方法的步骤。
23.一种设备,包括:处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述设备执行如本技术所述的股骨截骨导板组件模型的构建方法的步骤、或如本技术所述的股骨截骨导板组件的制备方法的步骤。
附图说明
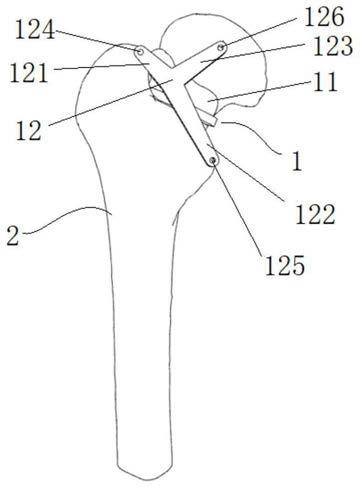
24.图1显示为本技术股骨截骨导板组件使用状态的主视结构示意图。
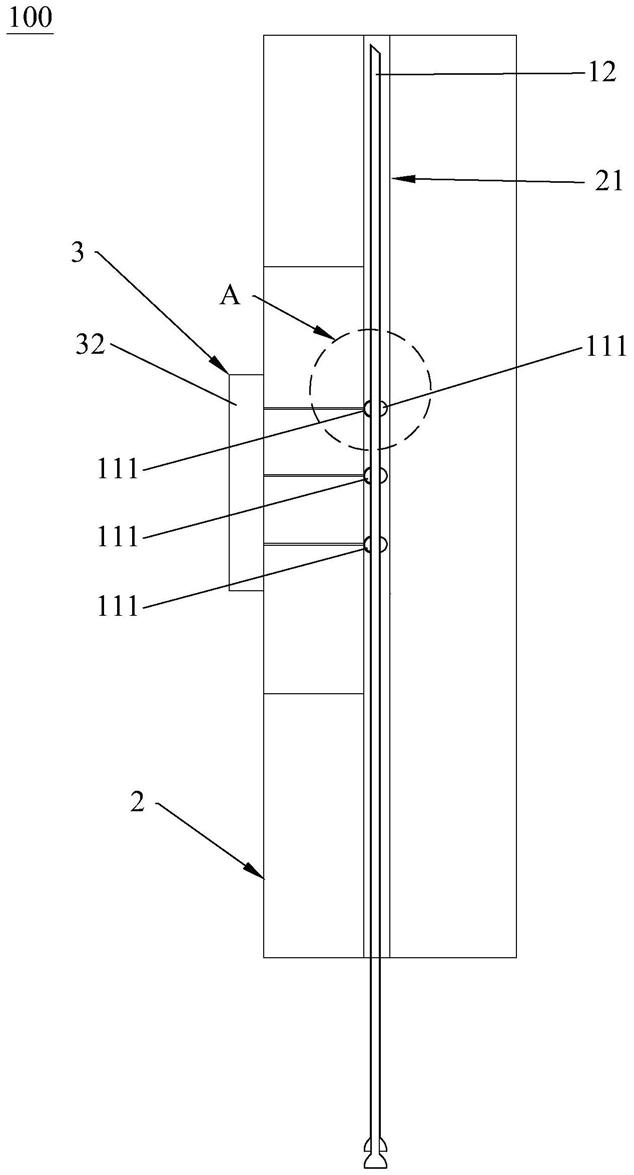
25.图2显示为本技术股骨截骨导板组件使用状态的分体结构示意图。
26.图3显示为本技术截骨导板本体的一个角度的立体结构示意图。
27.图4显示为本技术截骨导板本体的另一个角度的立体结构示意图。
28.图5显示为本技术三角定位导板的立体结构示意图。
29.图6显示为本技术股骨截骨导板组件截骨完成后的结构示意图。
30.图7显示为本技术股骨截骨导板组件的分体结构示意图。
31.元件标号说明
[0032]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
股骨截骨导板组件
[0033]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
截骨导板本体
[0034]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导板贴合面
[0035]
112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二引导部
[0036]
113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一引导部
[0037]
114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位部
[0038]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
三角定位导板
[0039]
121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一指引臂
[0040]
122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二指引臂
[0041]
123
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三指引臂
[0042]
124
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一指引孔
[0043]
125
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二指引孔
[0044]
126
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三指引孔
[0045]
127
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转基准部
[0046]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
股骨
[0047]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
大转子尖端
[0048]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
小转子尖端
[0049]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
股骨头中心位置
具体实施方式
[0050]
本技术发明人经过大量探索性研究,提供了一种新的股骨截骨导板组件及其模型的构建方法,所述股骨截骨导板组件可以有效避免股骨截骨后,股骨头中心位置丢失,医生在术中缺少股骨头中心位置作为引导信息,从而影响假体的选型和植入,本技术通过特殊结构的设计以提高术后关节与术前关节活动中心的一致性以及术后下肢长度与术前的一致性,从而提高手术效果,恢复患者功能,在此基础上完成了本技术。
[0051]
本技术第一方面提供一种股骨截骨导板组件模型的构建方法,包括:
[0052]
提供股骨三维模型,所述股骨三维模型包括截骨线,所述截骨线自股骨颈下缘靠近小转子的一侧延伸至股骨颈下缘靠近大转子的一侧;
[0053]
获取截骨引导面,基于截骨线向垂直于股骨颈表面并远离股骨颈表面的方向延伸形成截骨引导面;
[0054]
获取导板贴合面,所述导板贴合面为自截骨线沿股骨颈表面向股骨头方向延伸所形成的贴合面;基于导板贴合面向远离股骨颈表面的方向延伸,获得构建截骨导板本体模型;
[0055]
获取定位部,在所述截骨导板本体模型表面构建向远离股骨颈表面的方向突起的定位部;
[0056]
获取旋转基准部,基于所述定位部确认三角定位模型的旋转中心作为旋转基准部;基于所述旋转基准部延伸至大转子尖端构建第一指引面;基于所述旋转基准部延伸至
小转子尖端构建第二指引面;基于所述旋转基准部延伸至股骨头中心位置构建第三指引面;基于所述第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸形成三角定位模型。
[0057]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:提供股骨三维模型,所述股骨三维模型包括截骨线。所述股骨三维模型通常可以包括股骨的各区域,例如,至少包括股骨头、股骨颈、股骨体、大转子及小转子等区域。所述股骨三维模型通常可以通过ct数据导入软件后获得,具体可以是例如simplant、mimics、proplan等软件。所述截骨线通常是股骨截骨手术中进行截骨的依据,其通常可以自股骨颈下缘靠近小转子的一侧延伸至股骨颈下缘靠近大转子的一侧。
[0058]
本技术所提供的股骨截骨导板组件模型的构建方法中,作为一具体实施例,截骨线可以包括第一截骨线和第二截骨线,所述第一截骨线自股骨颈下缘靠近小转子的一侧延伸至大转子内侧梨状窝;通常,第一截骨线是与股骨颈轴向方向垂直,也称为横向截骨线,第一截骨线位于小转子近端基底上方约8mm~15mm对应的股骨颈位置作为起始位置。优选的,第一截骨线位于小转子近端基底上方10mm~12mm对应的股骨颈位置。所述第二截骨线自大转子内侧梨状窝为起点、与第一截骨线呈钝角延伸至股骨颈下缘靠近大转子尖端的一侧。第二截骨线也称为纵向截骨线,所述纵向截骨线的延伸方向与横向截骨线的延伸方向之间的夹角可以为100
°
~120
°
、100
°
~110
°
、110
°
~120
°
等。本技术中,为了和股骨柄轮廓相匹配,设置了两条截骨线,可以避免损伤大转子,且可以使得截骨后假体放置更稳定,更到位。例如,第一截骨线和第二截骨线可以如证明文件所示。
[0059]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:获取截骨引导面,基于截骨线向垂直于股骨颈表面并远离股骨颈表面的方向测延伸形成截骨引导面。一般情况下,截骨引导面是基于截骨线向远离股骨颈表面的方向延伸一定的距离,即为截骨引导面的高度,通常情况下,截骨引导面的高度可以为4mm~8mm、4mm~6mm、或6mm~8mm等。截骨引导面一方面可以引导截骨,另一方面也可以为截骨工具提供一定的支撑面。此外,截骨引导面也可以朝向股骨头的方向延伸一定的距离,即可形成具有一定厚度的截骨引导部,截骨引导部的厚度即为截骨引导面朝向股骨头方向延伸的距离,通常可以为2.5mm~4mm、2.5mm~3mm、或3mm~4mm等。
[0060]
进一步的,在一具体实施例中,截骨引导面包括第一截骨引导面和第二截骨引导面。可以基于第一截骨线向远离股骨颈表面的方向延伸形成第一截骨引导面;可以基于第二截骨线向远离股骨颈表面的方向延伸形成第二截骨引导面。第一截骨引导面和第二截骨引导面基于截骨线向远离股骨颈表面的方向延伸的距离通常是相等的,与前述截骨引导面的高度基本相等,在某些情况下,也可以不等。第一截骨引导面和第二截骨引导面之间可以有一定的间隙,也可以是互相接触。分别基于第一截骨引导面和第二截骨引导面朝向股骨头方向延伸一定的距离,即可相应形成第一截骨引导部和第二截骨引导部,第一截骨引导面和第一截骨引导部与股骨颈的轴向方向垂直。所述第一截骨引导面的延伸方向和第二截骨引导面的延伸方向的夹角为钝角,其中钝角例如可以为100
°
~120、100
°
~110
°
、或110
°
~120
°
等。第一截骨引导面的延伸方向与第一截骨线的延伸方向一致。第二截骨引导面的延伸方向与第二截骨线的延伸方式一致。
[0061]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:获取导板贴合面,
所述导板贴合面为通常可以自截骨线沿股骨颈表面向股骨头方向延伸,从而可以有效贴合该区域的股骨颈表面。股骨颈的背面有110
°
~130
°
、110
°
~120
°
、或120
°
~130
°
的弧度,导板贴合面可以很好的贴合该弧度。所述贴合面通常可以位于截骨线上方,且位于股骨颈表面的中下部,例如,导板贴合面不超过股骨颈,更例如所述导板贴合面自截骨线沿股骨颈表面向股骨头方向延伸的距离可以为8mm~15mm、8mm~10mm、或10mm~15mm等。在本技术一优选实施方式中,基于截骨线沿股骨颈表面向股骨头方向延伸构建截骨导板本体模型的具体方法可以为:基于截骨线沿股骨颈表面向股骨头方向延伸构建导板贴合面,基于导板贴合面构建截骨导板本体模型。所述导板贴合面通常契合于股骨颈表面,所述导板贴合面通常可以位于截骨线上方,且位于股骨颈表面的中下部,例如,所述导板贴合面按股骨颈的轴方向,自截骨线向股骨头方向延伸的距离为8mm~15mm、8mm~10mm、或10mm~15mm等。将导板贴合面向远离股骨颈表面的方向延伸一定距离,即可构建获得截骨导板本体模型。延伸的距离通常与截骨导板本体模型的厚度是相对应的,例如,延伸的距离和截骨导板本体模型的厚度可以为2.5mm~4mm、2.5mm~3mm、或3mm~4mm等。
[0062]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:构建定位部,在所述截骨导板本体模型表面构建向远离股骨颈表面的方向突起的定位部,所述定位部位于截骨导板本体模型的外表面上。构建定位部的方法,例如可以自截骨导板本体模型靠近中间的位置向远离股骨颈表面的方向延伸一定的距离,形成具有一定高度的定位部,延伸的距离为10
‑
20mm、10
‑
15mm、或15
‑
20mm等。通常,定位部没有特殊要求,可以构建于截骨导板本体模型的外表面中央开阔位置,避免软组织干涉。
[0063]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:构建旋转基准部,基于定位部确认三角定位模型的旋转中心作为旋转基准部;旋转基准部与定位部相配合,旋转基准部可以用作为三角定位模型围绕定位部的轴向旋转的中心。
[0064]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:基于旋转基准部延伸至大转子尖端构建第一指引面;第一指引面位于截骨导板本体模型的远离股骨颈表面的一侧。第一指引面通常是自旋转基准部朝向大转子尖端按照一定的宽度延伸。第一指引面的末端可以指引大转子尖端的位置。第一指引面的长度通常没有限定,根据术中情况而定。在一具体实施例中,第一指引面自旋转基准部朝向大转子尖端延伸的距离即第一指引面的长度为10mm~25mm、10mm~15mm、15mm~20mm、或20mm~25mm等。
[0065]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:基于旋转基准部延伸至小转子尖端构建第二指引面;第二指引面位于截骨导板本体模型的远离股骨颈表面的一端。第二指引面通常是自旋转基准部朝向小转子尖端按照一定的宽度延伸。第二指引面的末端可以指引小转子尖端的位置。第二指引面的长度通常没有限定,根据术中情况而定。在一具体实施例中,第二指引面自旋转基准部朝向小转子尖端延伸的距离即第二指引面的长度为30mm~45mm、30mm~35mm、35mm~40mm、或40mm~45mm等。
[0066]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:基于旋转基准部延伸至股骨头中心位置构建第三指引面;第三指引面位于截骨导板本体模型的远离股骨颈表面的一端。第三指引面通常是自旋转基准部朝向股骨头中心位置按照一定的宽度延伸。第三指引面的末端可以指引股骨头中心位置的位置。第三指引面的长度通常没有限定,根据术中情况而定。在一具体实施例中,第三指引面自旋转基准部朝向股骨头中心位置延伸
的距离即第三指引面的长度为20mm~35mm、20mm~25mm、25mm~30mm、或30mm~35mm等。
[0067]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:构建三维定位模型,基于所述第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸形成三角定位模型。具体的,第一指引面向远离股骨颈表面的方向延伸一定的距离形成第一指引臂,第二指引面向远离股骨颈表面的方向延伸一定的距离形成第二指引臂,第三指引面向远离股骨颈表面的方向延伸一定的距离形成第三指引臂。第一指引臂和第二指引臂以及第三指引臂整体构成了三角定位模型。基于所述第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸的距离即为三角定位模型的厚度,所述厚度例如可以为2.5mm~6mm、2.5mm~4mm、或4mm~6mm等。第一指引面和第二指引面之间的夹角可以为150
°
~180
°
、150
°
~160
°
、160
°
~170
°
、或170
°
~180
°
等。第二指引面和第三指引面之间的夹角为90
°
~120
°
、90
°
~100
°
、100
°
~110
°
、或110
°
~120
°
等。第三指引面和第一指引面之间的夹角为90
°
~120
°
、90
°
~100
°
、100
°
~110
°
、或110
°
~120
°
等。
[0068]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:在第一指引面上构建用指引大转子尖端的第一指引孔。第一指引孔可以是盲孔或通孔,例如可以在第一指引面上对应大转子尖端的位置开孔,更具体的,可以在前述形成的第一指引臂上开设第一通孔,第一通孔穿设于第一指引臂,第一通孔穿设于第一指引臂,第一通孔可以自大转子尖端位置延伸到三角定位模型外侧,用于指引大转子尖端的特征位置。第一指引孔的孔径例如可以是1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0069]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:在第二指引面上构建用指引大转子尖端的第二指引孔。第二指引孔可以是盲孔或通孔,例如可以在第二指引面上对应小转子尖端的位置开孔,更具体的,可以在前述形成的第二指引臂上开设第二通孔,第二通孔穿设于第二指引臂,第二通孔可以自小转子尖端位置延伸到三角定位模型外侧,用于指引小转子尖端的特征位置。第二指引孔的孔径例如可以是1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0070]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:在第三指引面上构建用指引股骨头中心位置的第三指引孔。第三指引孔可以是盲孔或通孔,例如可以在第三指引面上对应股骨头中心位置的位置开孔,更具体的,可以在前述形成的第三指引臂上开设第三通孔,第三通孔穿设于第三指引臂,第三通孔可以自股骨头中心位置延伸到三角定位模型外侧,用于指引股骨头中心位置的特征位置。第三指引孔的孔径例如可以是1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0071]
本技术所提供的股骨截骨导板组件模型的构建方法,可以包括:在所述旋转基准部构建与定位部匹配的定位孔,用于套设所述三角定位模型。定位部与定位孔可拆卸连接。通常情况下,构建获得的定位部的尺寸应略小于定位孔的尺寸,这样可以使得旋转基准部可以相对于定位部轴向转动,但也不会太晃动。定位孔的孔径例如可以为2mm~8mm、2mm~4mm、4mm~6mm、或6mm~8mm等。
[0072]
本技术第二方面提供一种股骨截骨导板组件的制备方法,所述方法包括:根据本技术第一方面所提供的股骨截骨导板组件模型的构建方法构建获得的股骨截骨导板组件模型,制备股骨截骨导板组件。根据所述的模型制备获得股骨截骨导板组件的方法对于本领域技术人员来说应该是已知的,例如,可以采用3d打印等方法,通常来说,导板优选可以
采用生物相容性的光敏树脂进行3d打印。
[0073]
本技术第三方面提供一种股骨截骨导板组件,由本技术第一方面所提供的股骨截骨导板组件模型的构建方法构建获得、或由本技术第二方面所提供的股骨截骨导板组件的制备方法制备获得。
[0074]
本技术第四方面提供一种股骨截骨导板组件,如图1~7所示,股骨截骨导板组件包括贴合股骨颈的表面的截骨导板本体11,所述截骨导板本体11包括导板贴合面111,所述截骨导板本体11上设有沿截骨线延伸的截骨引导部,所述截骨导板本体11上还设有定位部114;还包括三角定位导板12,所述三角定位导板12设有与所述定位部114相配合的连接部127、用于定位大转子尖端的有第一指引臂121、用于定位小转子尖端的第二指引臂122、用于定位股骨头中心位置的第三指引臂123。
[0075]
本技术所提供的股骨截骨导板组件,其截骨导板本体11可以与股骨颈表面相贴合,导板贴合面111通常可以自截骨线沿股骨颈表面向股骨头方向延伸,从而可以有效贴合该区域的股骨颈表面,通过截骨引导部引导截骨工具进行截骨。截骨完成后,如图6所示,通过三角定位模块的连接部127与定位部114对接后,通过对连接部127进行对三角定位模块进行旋转,使得第一指引臂121的末端可以指引大转子尖端21特征位置,第二指引臂122的末端可以指引小转子尖端22特征位置,第三指引臂123的末端指引股骨头中心位置23,通过找到股骨头中心位置23,从而可以很好的进行假体的选型和植入的指导。
[0076]
本技术所提供的股骨截骨导板组件中,所述截骨线包括第一截骨线与第二截骨线,所述第一截骨线对应自股骨颈下缘靠近小转子尖端的一侧延伸至大转子内侧梨状窝的延伸线;所述第一截骨线垂直于股骨颈的轴向方向;也称为横向截骨线,第一截骨线位于小转子近端基底上方约8mm~15mm对应的股骨颈位置作为起始位置。优选的,第一截骨线位于小转子近端基底上方10mm~12mm对应的股骨颈位置。所述第二截骨线对应自大转子内侧梨状窝为起点、与第一截骨线呈钝角延伸至股骨颈下缘靠近大转子尖端的一侧的延伸线,第二截骨线也称为纵向截骨线。本技术中,为了和股骨柄轮廓相匹配,设置了两条截骨线,可以避免损伤大转子,且可以使得截骨后假体放置更稳定,更到位。例如,第一截骨线和第二截骨线可以如证明文件所示。所述截骨引导部包括沿所述第一截骨线延伸形成的第一引导部113和沿所述第二截骨线延伸形成的第二引导部112。
[0077]
本技术所提供的股骨截骨导板组件中,第二引导部112的延伸方向与第一引导部113的延伸方向呈钝角。所述第一引导部113的延伸方向和第二引导部112的延伸方向的夹角可以为100
°
~120
°
、100
°
~110
°
、或110
°
~120
°
等。其中第一引导部113的延伸方向与第一截骨线的延伸方向一致,第二引导部112的延伸方向与第二截骨线的延伸方向一致。
[0078]
本技术所提供的股骨截骨导板组件中,如图3和4所示,所述截骨导板本体11包括导板贴合面111,导板贴合面111可以向远离股骨颈表面的方向延伸一定的距离形成截骨导板本体11,延伸的距离即为截骨导板本体11的长度,所述截骨导板本体11的长度可以为8mm~15mm、8mm~10mm、10mm~12mm、或12mm~15mm等。截骨导板本体11与股骨颈贴合的弧度可以为110
°
~130
°
、110
°
~120
°
、或120
°
~130
°
等。
[0079]
本技术所提供的股骨截骨导板组件中,如图5所示,第一指引面的长度为10mm~25mm、10mm~15mm、15mm~20mm、或20mm~25mm等。第二指引面的长度为30mm~45mm、30mm~35mm、35mm~40mm、或40mm~45mm等。第三指引面的长度为20mm~35mm、20mm~25mm、25mm~
30mm、或30mm~35mm等。
[0080]
本技术所提供的股骨截骨导板组件中,如图5所示,第一指引臂121、第二指引臂122、第三指引臂123之间的角度可以根据固形标志特征。具体的,在一些实施方式中,第一指引臂121和第二指引臂122之间的夹角可以为150
°
~180
°
、150
°
~160
°
、160
°
~170
°
、或170
°
~180
°
等。第二指引臂122和第三指引臂123之间的夹角为90
°
~120
°
、90
°
~100
°
、100
°
~110
°
、或110
°
~120
°
等。第三指引臂123和第一指引臂121之间的夹角为90
°
~120
°
、90
°
~100
°
、100
°
~110
°
、或110
°
~120
°
等。
[0081]
本技术所提供的股骨截骨导板组件中,如图5所示,所述第一指引臂121上设有与大转子尖端21相配合的第一指引孔124;第一指引孔124用于指引大转子尖端21的位置。在一具体实施方式中,第一指引孔124的孔径为1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0082]
本技术所提供的股骨截骨导板组件中,如图5所示,所述第二指引臂122上设有与小转子尖端22相配合的第二指引孔125;第二指引孔125用于指引小转子尖端22的位置。在一具体实施方式中,第二指引孔125的孔径为1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0083]
本技术所提供的股骨截骨导板组件中,如图5所示,所述第三指引臂123上设有与指引股骨头中心位置23相配合的第三指引孔126;第三指引孔126用于指引股骨头中心位置23。在一具体实施方式中,第三指引孔126的孔径为1mm~5mm、1mm~2mm、2mm~3mm、3mm~4mm、或4mm~5mm等。
[0084]
本技术所提供的股骨截骨导板组件中,如图2和5所示,所述连接部127包括与定位部114相配合的定位孔,定位部114与定位孔可拆卸连接。定位孔的孔径例如可以为2mm~8mm、2mm~4mm、4mm~6mm、或6mm~8mm等。定位部114的尺寸应略小于定位孔的尺寸,这样可以使得连接部127可以相对于定位部114轴向转动,但也不会太晃动。
[0085]
本技术所提供的股骨截骨导板组件中,所述三角定位导板12通常具有一定的厚度,所述三角定位导板12的厚度例如可以为2.5mm~6mm、2.5mm~4.5mm、或4.5mm~6mm等。
[0086]
本技术第五方面提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现本技术第一方面所提供的股骨截骨导板组件模型的构建方法的步骤、或本技术第二方面所提供的股骨截骨导板组件的制备方法的步骤。
[0087]
本技术第六方面提供一种设备,包括:处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述设备执行本技术第一方面所提供的股骨截骨导板组件模型的构建方法的步骤、或本技术第二方面所提供的股骨截骨导板组件的制备方法的步骤。
[0088]
本技术所提供的用于股骨截骨手术的截骨导板组件可以有效避免术中所出现的股骨截骨后,股骨头中心位置丢失,医生在术中缺少股骨头中心位置作为引导信息,影响进行假体的选型和植入。本技术的股骨截骨导板组件可以提高术后关节与术前关节活动中心的一致性以及术后下肢长度与术前的一致性,从而提高手术效果,恢复患者功能,具有良好的产业化前景。
[0089]
以下通过特定的具体实例说明本技术的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点与功效。本技术还可以通过另外不同的具体实
施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神下进行各种修饰或改变。
[0090]
实施例1
[0091]
1)首先将患者dicom数据导入simplant 11.04软件中进行阈值分割及重建,分割阈值选择为:200~2976。后在此ct上进行颏成形手术三维方案设计,确定截骨线位置。如证明文件所示。
[0092]
2)将上述步骤的股骨和股骨颈截骨部分的stl数据分别导入geomagic studio 2013软件中。
[0093]
3)使用geomagic studio 2013内的面选取功能,标记出所需要的目标第一截骨线和第二截骨线,所述第一截骨线自股骨颈下缘延伸至大转子内侧梨状窝;第一截骨线与股骨颈的轴向方向垂直,所述第二截骨线自大转子内侧梨状窝为起点、与第一截骨线沿截骨线下缘呈钝角延伸;
[0094]
4)复制手术所应用的表面,相关表面具体为截断后需要移动的骨块及股骨本体截骨线上方10mm内,作为导板构建的基准面,并进一步拉伸形成导板雏形,导板雏形的具体厚度为5mm。
[0095]
5)根据第一截骨线和第二截骨线,在之前构建的导板雏形上,构建第一截骨引导面和第二截骨引导面,第一截骨引导面的高度为6mm,第二截骨引导面的高度为6mm。
[0096]
6)在导板雏形的外表面构建定位部,定位部向远离股骨颈表面的方向延伸一定的距离,延伸的距离为15mm。
[0097]
7)修整导板外形,完成截骨导板本体,如图3和4所示。
[0098]
8)根据定位部的位置,确定旋转基准部,在旋转基准部构建定位孔,定位孔的孔径是顶端5mm,底部8mm。
[0099]
9)根据手术应用的表面上的大转子尖端的位置,自旋转基准部延伸到大转子尖端构建第一指引面。第一指引面的长度为20mm。在第一指引面上与大转子尖端对应的位置构建第一指引孔,孔径为3mm。
[0100]
10)根据手术应用的表面上的小转子尖端的位置,自旋转基准部延伸到小转子尖端构建第二指引面。第二指引面的长度为40mm。在第二指引面上与小转子尖端对应的位置构建第二指引孔,孔径为3mm。
[0101]
11)根据手术应用的表面上的股骨头中心位置,自旋转基准部延伸到小转子尖端构建第三指引面。第三指引面的长度为30mm。在第三指引面上与股骨头中心位置对应的位置构建第三指引孔,孔径为3mm。
[0102]
12)基于第一指引面、第二指引面、第三指引面向远离股骨颈表面的方向延伸5mm构建获得三角定位模型,如图5所示。
[0103]
13)将上述导板金属打印实体(3d打印委托影为医疗科技(上海)有限公司进行,采用form3打印机进行打印)。
[0104]
根据构建所获得的模型,通过光敏树脂打印获得股骨截骨导板组件。通过上述构建获得的股骨截骨导板组件中的截骨导板本体进行股骨的截骨,在术中可以使截骨线精确的按照设计的位置进行个性化截骨,同时可以帮助医生在术中将股骨头中心位置作为引导信息,辅助医生进行假体的选型和植入。
[0105]
综上所述,本技术有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0106]
上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。