1.本发明涉及边坡监测技术领域,更具体的说是涉及一种多层级边坡滑坡变化监测方法。
背景技术:
2.边坡滑坡灾害给人民生产生活与经济建设带来巨大威胁,全世界每年都有大量的因各种自然人为因素产生的滑坡、泥石流等重大灾害,给居民生命财产安全带来巨大损失。例如大型水库上游边坡,水位高,对边坡形成巨大压力,且库区水位变化对库案边坡侵蚀严重,容易造成危岩体崩滑等严重地质灾害,严重威胁着江河航道的航运安全。
3.边坡灾害监测一直是灾害监测领域的研究热点,也产生了许多相关的边坡监测设备及方法。目前,边坡的崩、滑灾害监测可大体分为“点”式(裂缝伸缩计、分布光纤法、gps、全站仪)和“面”式(gbsar、insar技术、激光扫描测量)两类。传统“点”监测法只能实现定点目标的周期变化监测,由于滑坡具有变化范围广,滑坡位置不确定等特点,无法精确实现监测区域的全面变化检测及预测;“面”式监测方法能实现宏观大范围岩体的整体变化趋势,但是一般观测视角有限,且由于不同时段植被及周围环境变化的影响,导致分析精度低,无法实现厘米级裂缝变化检测。此外,“面”监测的方法一般采用一定频率和间隔采样获取数据,以激光扫描监测方法为例,由于点云数据受采样间距限制及边界测量折射误差等,对裂缝、剥蚀等局部变化难以体现。
4.因此,如何提供一种能实现对边坡滑坡灾害的整体与局部裂缝精细变化监测的多层级边坡滑坡变化监测方法是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种多层级边坡滑坡变化监测方法,能够实现对边坡的整体变化趋势监测和对裂缝的精细变化监测。
6.为了实现上述目的,本发明采用如下技术方案:
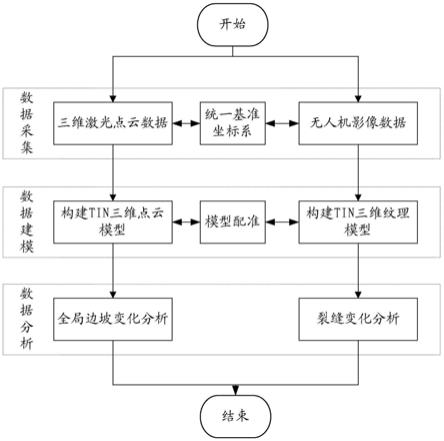
7.一种多层级边坡滑坡变化监测方法,包括以下步骤:
8.数据采集:按照预设周期采集监测边坡的三维激光点云数据和无人机影像数据,并将所述三维激光点云数据和所述无人机影像数据转换到统一基准坐标系中;
9.数据建模:利用所述三维激光点云数据构建tin三维模型,利用所述无人机影像数据构建tin三维纹理模型,并将所述tin三维模型和所述tin三维纹理模型配准至统一基准坐标系中;
10.全局边坡变化分析:遍历所述tin三维模型中的所有监测点在不同监测周期间的数据变化,得到监测边坡的整体变化趋势;
11.裂缝变化分析:将数据变化超出阈值的监测点作为裂缝区域,并将所述tin三维纹理模型中对应各个裂缝区域坐标的区域,投影成局部正射影像;
12.基于所述局部正射影像测量所述裂缝区域在不同监测周期间的裂缝宽度变化。
13.优选的,在上述一种多层级边坡滑坡变化监测方法中,在数据采集过程中,选取监测边坡中的固定控制点或监测边坡周边稳定位置的目标作为控制基准点,结合所述控制基准点将所述三维激光点云数据和所述无人机影像数据转换至统一基准坐标系中。
14.优选的,在上述一种多层级边坡滑坡变化监测方法中,所述无人机影像数据的采集过程中,采用无人机对监测边坡进行多角度摄影,且同一摄影序列的相邻旁向重叠度和航向重叠度均不低于80%,摄影分辨率为最小识别裂缝的1/10。
15.优选的,在上述一种多层级边坡滑坡变化监测方法中,所述tin三维模型的构建过程为:
16.以每次扫描设备、设站位置和扫描密度不变为前提,采用地面三维激光扫描方法按照预设周期采集监测边坡的三维激光点云数据;
17.对三维激光点云数据进行去噪处理;
18.按照扫描平均步长将去噪处理后的三维激光点云数据构建为tin三维模型。
19.优选的,在上述一种多层级边坡滑坡变化监测方法中,利用dpgrid、get3d、photoscan或smart3d影像三维重建软件将无人机影像数据构建为tin三维纹理模型。
20.优选的,在上述一种多层级边坡滑坡变化监测方法中,全局边坡变化分析过程为:
21.遍历所述tin三维模型中的所有监测点,分别计算其在相邻监测周期间的偏差;
22.将所有监测点的偏差进行统计分析,并按照偏差大小以不同颜色表达,得到监测边坡整体的变化趋势。
23.优选的,在上述一种多层级边坡滑坡变化监测方法中,任一监测点偏差的计算公式为:
24.d
i
=n
i
·
(x
p
‑
x
i
);
25.其中,d
i
为当前监测点p在两个监测周期内的偏差;x
p
为当前监测点p的坐标值;x
i
为当前监测点p距离最近的三角形面片的中心点的坐标;当前监测点p半径为以r为搜索半径的球形空间;n
i
为距离最近的三角形面片的法向量。
26.优选的,在上述一种多层级边坡滑坡变化监测方法中,裂缝变化分析过程为:
27.将偏差大于预设阈值的监测点作为裂缝区域,并进行编号;
28.从配准到基准坐标系下的所述tin三维纹理模型中找到对应各个裂缝区域的区域;
29.根据裂缝边界三角面片的法向变化与像素灰度阶跃变化,在所述tin三维纹理模型中提取裂缝区域及边界;
30.利用最小二乘法将从所述tin三维纹理模型中提取出的裂缝区域及边界所在区域数据进行投影面拟合,并生成局部正射影像图;
31.在所述局部正射影像图中标定裂缝边界的坐标值,并根据所述局部正射影像图的比例确定裂缝宽度;
32.对比不同监测周期中裂缝宽度变化,得到边坡局部裂缝变化情况。
33.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种多层级边坡滑坡变化监测方法,集成地面三维激光扫描和无人机近景摄影测量方法,通过三维激光点云数据构建的tin三维模型可实现大范围边坡整体变化趋势监测;以tin三维模型为控制基础,将tin三维纹理模型与tin三维模型进行精密配准,实现对边坡局部裂缝进行精细对比
分析,通过高清摄影方式实现毫米级裂缝变化监测,实现对边坡滑坡灾害的整体与局部裂缝精细变化监测,为山区及江河边坡滑坡等地质灾害提供预警辅助。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
35.图1附图为本发明提供的多层级边坡滑坡变化监测方法的流程图;
36.图2附图为本发明提供的tin三维模型中监测点偏差的计算原理图;
37.图3附图为本发明提供的边坡整体变化趋势图;
38.图4附图为本发明提供的裂缝变化分析过程的流程图;
39.图5附图为本发明提供的tin三维纹理模型中裂缝示意图。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.如图1所示,本发明实施例公开了一种多层级边坡滑坡变化监测方法,包括以下步骤:
42.s1、数据采集:按照预设周期采集监测边坡的三维激光点云数据和无人机影像数据,并将三维激光点云数据和无人机影像数据转换到统一基准坐标系中;
43.s2、数据建模:利用三维激光点云数据构建tin三维模型,利用无人机影像数据构建tin三维纹理模型,并将tin三维模型和tin三维纹理模型配准至统一基准坐标系中,实现模型匹配;
44.s3、全局边坡变化分析:遍历tin三维模型中的所有监测点在不同监测周期间的数据变化,得到监测边坡的整体变化趋势;
45.s4、裂缝变化分析:将数据变化超出阈值的监测点作为裂缝区域,并将tin三维纹理模型中对应各个裂缝区域坐标的区域,投影成局部正射影像;
46.基于局部正射影像测量裂缝区域在不同监测周期间的裂缝宽度变化。
47.本发明整体分为数据采集、数据建模和数据分析三部分,其中,数据采集为数据建模提供数据基础,数据建模为数据分析的基础模型。数据采集是在控制基准基础上,对待监测边坡进行三维及纹理数据(地面三维激光点云数据与无人机影像)采集。数据建模则是分别以激光三维点云数据及无人机影像数据为基础,进行不规则三角网(tin,triangulated irregular network)三维模型构建.在变化分析中,以两类数据构建的tin模型为基础,分别进行全局边坡变化及局部裂缝变化分析。
48.下面,对上述步骤进行进一步描述。
49.s1、数据采集:
50.在数据采集过程中,选取监测边坡中的固定控制点或监测边坡周边稳定位置的目标作为控制基准点,结合控制基准点将三维激光点云数据和无人机影像数据转换至统一基准坐标系中。
51.当视野开阔,附近无大范围山体、水面、高压线等干扰gnns信号目标时候,优先采用gnss(global navigation satellite system,gnss)控制网,如果周边无法建立有效gnss控制网,附近有其它高等级控制点,可以通过建立控制导线和三角高程方法,在观测位置附近布设控制网;当两条件都不具备时候,可采用初次三维激光扫描点云坐标系作为基准,这种坐标系一般是以铅垂线向上为z方向,指向监测边坡平均投影面法向为y方向的右手坐标系。将观测数据转换到统一坐标基准,比较其相对变化。
52.其中,三维激光点云数据采集过程中,采用地面三维激光扫描方法,要求每次扫描设备、设站位置及扫描密度不变,按照监测周期采集三维激光点云数据。
53.无人机影像数据采集过程中,采用无人机对监测边坡进行多角度摄影,且同一摄影序列的相邻旁向重叠度和航向重叠度均不低于80%,摄影分辨率为最小识别裂缝的1/10(例如最小识别裂缝10mm,则摄影表面分辨率为1mm)。
54.s2、数据建模
55.1、点云建模
56.tin三维模型的构建过程为:
57.以每次扫描设备、设站位置和扫描密度不变为前提,采用地面三维激光扫描仪按照预设周期采集监测边坡的三维激光点云数据;
58.对三维激光点云数据进行去噪处理;
59.按照扫描平均步长将去噪处理后的三维激光点云数据构建为tin三维模型。
60.2、无人机影像建模
61.首先对采集到的无人机影像数据进行整体匀色处理,在此基础上,当前有很多成熟软件可实现将序列影像构建为tin三维纹理模型,如:dpgrid、get3d、photoscan、smart3d。
62.tin三维模型和tin三维纹理模型构建完成之后,分别提取控制基准点并记录,结合控制基准点,配准到统一基准坐标系中。tin三维模型和tin三维纹理模型配准时候,一般是至少需要4对同名像点,如果同名像点不具备或者不准确的情况下,可在模型上先手动选择4对以上同名目标点,然后采用最近点迭代算法(icp,iterative closest point)进行配准,实现两个模型之间的匹配。
63.s3、全局边坡变化分析过程:
64.1、遍历tin三维模型中的所有监测点,分别计算其在相邻监测周期间的偏差。
65.如图2所示,任一监测点偏差的计算公式为:
66.d
i
=n
i
·
(x
p
‑
x
i
);
67.其中,d
i
为当前监测点p在两个监测周期内的偏差;x
p
为当前监测点p的坐标值;x
i
为当前监测点p距离最近的三角形面片的中心点的坐标;当前监测点p半径为以r为搜索半径的球形空间;n
i
为距离最近的三角形面片的法向量。
68.2、将所有监测点的偏差进行统计分析,并按照偏差大小以不同颜色表达,得到监测边坡整体的变化趋势;
69.将所有监测点的偏差区间进行统计分析,得到监测区域变化极值、标准偏差等信息,然后按偏差大小以不同颜色区间表达,即可得到整体的监测变化趋势,如图3所示,图中颜色表示不同偏差颜色。
70.s4、如图4
‑
5所示,裂缝变化分析过程为:
71.s41、将偏差大于预设阈值的监测点作为裂缝区域,并进行编号;
72.s42、从配准到基准坐标系下的tin三维纹理模型中找到对应各个编号裂缝区域的区域;
73.s43、根据裂缝边界三角面片的法向变化与像素灰度阶跃变化,在tin三维纹理模型中提取裂缝区域及边界;
74.s44、利用最小二乘法将从tin三维纹理模型中提取出的裂缝区域及边界所在区域数据进行投影平面拟合,并生成局部正射影像图;其中,局部正射影像图是将拟合的投影面区域的不规则三角网面片(带纹理),依据纹理坐标,将相应像素按指定分辨率进行投影,得到的正投影图像,这类图像类似地图,具有精确比例信息,可以量测裂缝宽度。投影分辨率以实际拍摄像素分辨率为准。
75.s45、在局部正射影像图中标定裂缝边界的坐标值,并根据局部正射影像图的比例确定裂缝宽度;
76.s46、对比不同监测周期中裂缝宽度变化,得到边坡局部裂缝变化情况。
77.后期数据在配准基础上,直接依据裂缝位置进行照片定位,重新比对裂缝宽度即可。
78.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
79.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。