技术特征:
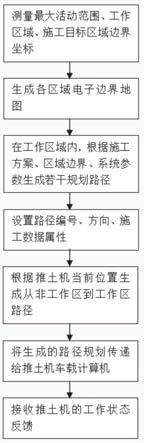
1.无人驾驶推土机路径规划方法,其特征在于:包括以下步骤:获取推土机最大活动区域的边界点位置数据,将最大活动区域划分为工作区域和非工作区域;将工作区域划分为施工目标区域和施工行驶区域;确定推土机对施工目标的推进方向,在工作区域内生成至少一条覆盖施工目标区域的规划路径;依据推土机当前位置,生成从非工作区域到工作区域的路径规划。2.如权利要求1所述的无人驾驶推土机路径规划方法,其特征在于:每一条规划路径包含编号信息、坐标信息、方向信息和施工信息。3.如权利要求2所述的无人驾驶推土机路径规划方法,其特征在于:所述编号信息为:每条路径依次编号,同一条路径往返两个方向,记录为同一编号。4.如权利要求2所述的无人驾驶推土机路径规划方法,其特征在于:所述坐标信息为路径具有坐标点集合。5.如权利要求2所述的无人驾驶推土机路径规划方法,其特征在于:所述方向信息为:路径包括前进和后退两个方向。6.如权利要求2所述的无人驾驶推土机路径规划方法,其特征在于:所述施工信息为:依据三维平面高程图和路径的地理坐标,为每一个路径点分配高程值,用于铲刀姿态控制。7.如权利要求6所述的无人驾驶推土机路径规划方法,其特征在于:所述铲刀姿态控制的过程为:获取推土机当前铲刀姿态信息,包括水平坐标、垂直坐标、俯仰角和倾斜角;对比推土机所在路径施工信息中的当前位置施工平面三维坐标信息与铲刀当前姿态信息,依据设定的施工平面位置信息调整铲刀当前姿态,保存铲刀最终姿态;推土机从当前路径的起点行驶到终点,铲刀恢复到设定姿态,推土机倒退至当前路径起始点;依据当前路径施工过程中铲刀姿态的历史数据,判断当前路径的施工效果是否满足要求,是则切换至下一路径,否则重复上述步骤。8.无人驾驶推土机路径规划系统,包括:参数设置模块和路径生成模块;参数设置模块被配置为:获取推土机最大活动区域的边界点位置数据,将最大活动区域划分为工作区域和非工作区域;将工作区域划分为施工目标区域和施工行驶区域;路径生成模块被配置为:确定推土机对施工目标的推进方向,在工作区域内生成至少一条覆盖施工目标区域的规划路径;依据推土机当前位置,生成从非工作区域到工作区域的路径规划。9.一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1
‑
7中任一项所述的无人驾驶推土机路径规划方法中的步骤。10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1
‑
7中任一项所述的无人驾驶推土机路径规划方法中的步骤。
技术总结
本发明涉及无人驾驶推土机路径规划方法、系统、存储介质及设备,其中,无人驾驶推土机路径规划方法包括以下步骤:获取推土机最大活动区域的边界点位置数据,划分为工作区域和非工作区域;将工作区域划分为施工目标区域和施工行驶区域;确定推土机对施工目标的推进方向,在工作区域内生成至少一条覆盖施工目标区域的规划路径;依据推土机当前位置,生成从非工作区域到工作区域的路径规划。结合工程施工要求、施工场地及施工目标,能够自动规划、生成批量行驶路径,使无人驾驶推土机通过跟踪路径坐标行驶,按照路径施工属性指定的要求进行铲刀姿态控制,能够自动完成施工任务。能够自动完成施工任务。能够自动完成施工任务。
技术研发人员:车晓波 胡滨 王勇 李研强 李超 张子辉
受保护的技术使用者:山推工程机械股份有限公司
技术研发日:2021.08.30
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。