1.本发明属于航空多功能分时复用系统通用电机冗余控制技术领域,涉及飞机上多台电动液压泵电机冗余控制过程中转子初始位置估算方法。
背景技术:
2.本发明应用于航空起动/发电一体化多功能分时复用控制系统。该系统由自耦变压整流单元(atru)和通用电机控制器(cmsc)组成。cmsc可在飞机起飞的不同阶段实现对起发电机、电环控电机、电动液压泵电机、备份电动液压泵电机的控制。当系统处于电动液压泵驱动模式中,cmsc的作用是实现电动液压泵的变频控制及多泵余度控制。当主泵电机发生故障时,上层管理系统应当迅速调用备份泵电机,重新实现系统控制功能,保障的系统稳定运行,以此来提高了分时复用控制系统将来装机应用时的维护性。在切换过程中,高精度的转子初始位置预定位方法尤为重要。
3.目前在永磁同步电机启动阶段,对转子位置主流的定位模式采用的是磁定位法,即给电机定子绕组通静止的电流矢量,产生的电磁转矩会使电机转子旋转到预定的位置,并从该位置加速起动。永磁同步电机上电时转子的位置是随机的,以图1中三种情况为例,为了使转子磁极准确定位到预定位置(d轴与α轴重合为0
°
),需要产生一个如图1所示固定为0
°
的电流,转子在这个电流产生的定子磁场的吸引下就会转起来,而这个定子磁场是固定的,所以转子就被吸引到0
°
的位置固定下来。但此方法存在弊端,由电机的运行方程可知,电机要想转动,必须克服外部的负载转矩和摩擦阻力,由于受到负载的影响,电机定位会存在一个盲区,如图2中阴影区域所示,且定位盲区是不可避免的,且随负载转矩的增大而增大。由于转子位置在初始时刻是随机的,如果转子在定位盲区内,如图2所示的阴影区域内,此时产生的电磁转矩不足以使转子旋转,转子就不能到达设定的初始位置,这样会导致起动失败。如果开环控制前转子初始位置处在0
°
附近,此时对开环启动不会有很大影响,而当转子d轴位于180
°
附近时即gh区域,由于实际初始位置与开环控制默认的0
°
初始方向基本反向,因此会造成短暂反转甚至失步。
技术实现要素:
4.为解决现有技术存在的问题,本发明提出一种航空通用电机控制器多台泵电机切换转子预定位方法,通过磁定位法进行两次定位,有效避开定位盲区,解决定位盲区的问题,避免定位失败从而造成短暂反转甚至失步的现象,提高驱动电机的互换性以及电机与通用电机控制器的兼容性。
5.本发明的技术方案为:
6.所述一种航空通用电机控制器多台泵电机切换转子预定位方法,采用两次磁定位的方法,先对永磁同步电机转子的相位进行初始化,将转子牵引到设定位置获取初始位置信息,避开定位盲区后,再对永磁同步电机转子进行磁定位。
7.进一步的,对永磁同步电机转子的相位进行初始化,将转子牵引到设定位置获取
初始位置信息的过程为:对永磁同步电机定子先通入一个方向与β轴正方向一致的静止电流矢量,驱使转子d轴旋转到β轴正方向或者负方向。
8.进一步的,再对永磁同步电机转子进行磁定位的过程为:给永磁同步电机定子通入与α轴方向重合的静止电流矢量,实现对永磁同步电机转子磁定位。
9.进一步的,采用电流单闭环结构实现施加电流矢量,其中对永磁同步电机转子的相位进行初始化的操作过程为:开通电流单闭环结构中的逆变器b相上管,使电机转子位置处于b轴方向上,避开盲区,初始化完成后关断开关管;再对永磁同步电机转子进行磁定位的操作过程为:开通电流单闭环结构中的逆变器a相上管,使电机转子位置α轴位置方向上,完成准确定位后关断开关管。
10.进一步的,给定的电流矢量大小设定为电流额定值。
11.有益效果
12.本发明提供了一种航空通用电机控制器多台泵电机切换转子预定位方法,该方法在泵电机发生故障需要切换至备份电机的时保障了系统的稳定运行和切换的快速性。该方法可提高驱动电机的互换性以及电机与通用电机控制器的兼容性。
13.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
14.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
15.图1:上电转子位置示意图;
16.图2:上电转子位置示意图;
17.图3:转子预定位示意图;
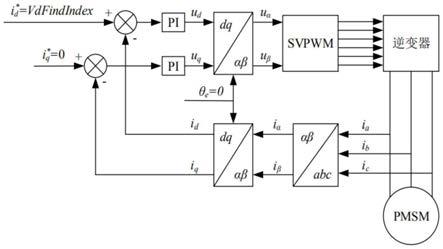
18.图4:转子预定位算法控制示意图。
具体实施方式
19.下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
20.本实施例中提出一种航空通用电机控制器多台泵电机切换转子预定位方法,解决了定位盲区的问题,提高驱动电机的互换性以及电机与通用电机控制器的兼容性。具体介绍如下:
21.永磁同步电机在静止时有齿槽定位力和轴承摩擦力,称之为电机的固有转矩t0,而磁定位中直流磁场产生的定位转矩取决于电流幅值和功角,见式(1):
[0022][0023]
其中n
p
为永磁同步电机磁极对数,为转子磁链,i
s
为施加的定子电流,θ
sr
为定子磁势和转子磁势之间的夹角,即转子初始位置角。永磁同步电机旋转定位时t
e
>t0,由于转子当前位置随机,此时会出现以下两种情况:
[0024]
1、定位过程中转子没有转动,启动时也不会出现很大的误差角,如图1(c)所示,此
时转子的初始位置角恰好落在定位盲区中,无法旋转定位的极限夹角为:
[0025][0026]
此时通过增大定位电流可以缩小定位盲区,但是在电机起动时容易造成过流,同时缩小定位盲区只是减小了转子落在定位盲区的几率,仍不能保证每次定位成功。
[0027]
2、默认的转子位置与实际位置相差180
°
电角度,如图1(b)所示,此时起动时有可能造成反转。
[0028]
本实施例采用两次磁定位的方法,对转子的相位进行初始化,将转子牵引到设定位置获取初始位置信息。磁定位的基本原理是,向永磁同步电机定子施加一个固定方向的电压矢量,则该电压矢量会在该矢量方向上产生一个恒定的定子磁势,而转子永磁体本身存在一个方向沿同步坐标系d轴方向的转子磁势。由于定子磁势和转子磁势之间存在夹角,因此会产生作用力将转子拖动到该电压矢量的方向上,从而实现转子初始位置估计,转子预定位的示意图如图3所示。
[0029]
转子预定位法是给永磁同步电机定子施加一个角度固定的直流电流,使其产生一个方向固定的磁场,如果该磁场与转子永磁体直接存在一个夹角,那么就会产生一个指向该磁场的电磁转矩,转子就能够旋转到给定电流矢量位置,转矩公式可由下式表示:
[0030]
t
e
=kf
s
f
r
sinθ
sr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0031]
式中,k为常数与电机相关,f
s
为定子磁势,f
r
为转子磁势,θ
sr
为定子磁势和转子磁势之间的夹角。从电磁转矩公式可看出,电磁转矩的大小由定子磁势和转子磁势以及之间夹角所决定,其中由于转子材料尺寸已确定,忽略电机参数变化情况下转子磁势也就确定。能影响该转矩大小的变量主要有定子磁势和夹角,定子磁势与给定的电流矢量成正比,给定电流受到电机本体的限制,通常不超过其额定电流。
[0032]
为了解决定位盲区导致的定位失败问题,可通过预定位的方式,避免给定电流矢量落在定位盲区之内。为了确保开环启动前转子初始位置角位于ef区域,先给永磁同步电机定子通入一个方向与β轴正方向一致的静止电流矢量,驱使转子d轴旋转到β轴正方向或者负方向,然后再给永磁同步电机定子通入与α轴方向重合的静止电流矢量,从而有效避开盲区gh。
[0033]
通过施加电流矢量的方式进行转子预定位结构简单易于实现,采用一个电流单闭环结构,可有效防止过流现象的发生,给定电流矢量大小通常设定为电流额定值,这样能够有效提高定位准确性。具体操作方法如下:
[0034]
1、对转子位置进行初始化。开通逆变器b相上管,使电机转子位置处于b轴方向上,避开盲区。初始化定位完成后关断开关管。
[0035]
2、开通逆变器a相上管,使电机转子位置处于图3中α轴位置方向上,完成准确定位,并关断开关管。
[0036]
图4所示为本实施例中转子预定位算法控制示意图。采用电流闭环的预定位法,由于已经进行了电流闭环,矢量电流i
d
能够跟踪给定值i
dref
,此时的i
dref
设定为一常数vdfindindex,为了能够有效提高定位的准确性,给定电流矢量的大小可以为电机的额定电流。此时可以通过开通逆变器b相上管,使得电机转子位置处于图3中β轴位置方向上,避开盲区。再开通逆变器a相上管,使电机转子位置处于图3中α轴位置方向上,完成准确定位。
[0037]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。