技术特征:
1.一种坐标测量机系统,其包括:视觉探针,其包括:光源;物镜,其输入由所述光源照射的工件表面产生的图像光,并且沿着成像光路传输所述图像光,其中所述物镜限定所述视觉探针的光轴,所述光轴至少在所述物镜和所述工件表面之间延伸;照相机,其接收沿所述成像光路传输的成像光并提供所述工件表面的图像;滑动机构配置,其包括x轴滑动机构、y轴滑动机构和z轴滑动机构,它们各自被配置为在机器坐标系内分别在相互正交的x轴、y轴和z轴方向上移动所述视觉探针;旋转机构,其联接在所述z轴滑动机构和所述视觉探针之间,并且被配置为将所述视觉探针旋转到相对于所述机器坐标系的z轴的不同角度方向;一个或多个处理器;和与所述一个或多个处理器耦合并存储程序指令的存储器,所述程序指令在由所述一个或多个处理器执行时使所述一个或多个处理器至少:使用所述旋转机构调整所述视觉探针的方向,以使所述视觉探针的所述光轴指向所述工件的表面,其中所述视觉探针的所述光轴不平行于所述机器坐标系的z轴,并且对应于图像堆叠采集轴;采集包括多个图像的图像堆叠,每个图像对应于所述视觉探针沿着所述图像堆叠采集轴的聚焦位置,其中采集所述图像堆叠包括:调节多个所述滑动机构,以将所述视觉探针从各自沿着所述图像堆叠采集轴的第一图像采集位置移动到第二图像采集位置,其中所述视觉探针分别在第一图像采集位置和第二图像采集位置采集多个图像的第一图像和第二图像;和调节所述多个滑动机构,以将所述视觉探针从也沿着所述图像堆叠采集轴的所述第二图像采集位置移动到第三图像采集位置,其中所述视觉探针在所述第三图像采集位置采集多个图像的第三图像;和至少部分地基于对所述图像堆叠的图像的分析确定聚焦曲线数据,其中所述聚焦曲线数据指示所述工件的表面上的多个表面点的3维位置。2.根据权利要求1所述的系统,其中作为所述图像堆叠的分析的一部分,所述多个表面点的每个表面点对应于所述图像堆叠中的感兴趣区域的中心,并且所述分析包括确定所述图像堆叠的每个感兴趣区域的聚焦曲线作为所述聚焦曲线数据的一部分并且每个聚焦曲线的峰值表示相应表面点的3维位置。3.根据权利要求1所述的系统,其中当由所述一个或多个处理器执行时所述程序指令还使所述一个或多个处理器至少部分地基于所述聚焦曲线数据显示所述工件表面的3维表示。4.根据权利要求1所述的系统,其中调节所述多个滑动机构以将所述视觉探针从所述第一图像采集位置移动到所述第二图像采集位置包括按x轴图像间隔调节所述x轴滑动机构、按y轴图像间隔调整所述y轴滑动机构以及按z轴图像间隔调整所述z轴滑动机构。5.根据权利要求4所述的系统,其中所述图像堆叠中的所述多个图像中的每一个之间的间隔对应于所述x轴间隔、所述y轴间隔和所述z轴间隔。
6.根据权利要求1所述的系统,其中在所述第一图像采集位置和所述第二图像采集位置之间沿着所述图像堆叠采集轴的距离与在所述第二图像采集位置和所述第三图像采集位置之间沿着所述图像堆叠采集轴的距离相同。7.根据权利要求1所述的系统,其中所述旋转机构被配置为将所述视觉探针以多种方向定向,至少包括:所述视觉探针的光轴相对于所述机器坐标系的z轴成0度角的方向;和所述视觉探针的光轴相对于所述机器坐标系的z轴成45度角的方向。8.根据权利要求7所述的系统,其中所述系统被配置为:以与所述视觉探针的光轴相对于所述机器坐标系的z轴成45度角的方向,用所述视觉探针采集所述图像堆叠。9.根据权利要求1所述的系统,其中在调节所述多个滑动机构以在所述图像采集位置之间移动所述视觉探针的过程中,不调节所述旋转机构以使不调节所述视觉探针的方向并且保持恒定。10.根据权利要求1所述的系统,其中在获取所述图像堆叠期间,所述视觉探针的不平行于所述机器坐标系的z轴的光轴和所述图像堆叠采集轴大致垂直于所述工件表面的至少一部分。11.根据权利要求1所述的系统,其中所述工件表面是第一工件表面,并且所述视觉探针的方向是第一方向,并且所述图像堆叠是利用所述视觉探针在所述第一方向中采集的第一图像堆叠,以及所述程序指令在由所述一个或多个处理器执行时进一步使所述一个或多个处理器在不同于所述第一方向的第二方向上用所述视觉探针并且以指向所述工件的第二工件表面的所述视觉探针的光轴采集第二图像堆叠,所述第二工件表面以在所述机器坐标系中与所述第一工件表面不同的角度定向。12.根据权利要求11所述的系统,其中所述程序指令在由所述一个或多个处理器执行时还使所述一个或多个处理器至少部分地基于对所述第二图像堆叠的分析确定聚焦曲线数据,其中所述聚焦曲线数据指示在所述工件的第二工件表面上的多个表面点的3维位置。13.根据权利要求12所述的系统,其中当由所述一个或多个处理器执行时所述程序指令还使所述一个或多个处理器:至少根据基于对第一图像堆叠的分析而不是基于对第二图像堆叠的分析而确定的所述聚焦曲线数据来显示所述第一工件表面的至少一部分的3维表示;和至少根据基于对第二图像堆叠的分析而不是基于对第一图像堆叠的分析而确定的所述聚焦曲线数据来显示所述第二工件表面的至少一部分的3维表示。14.根据权利要求12所述的系统,其中在所述第一图像堆叠和第二图像堆叠中都成像所述第一工件表面的第一部分上的共同成像的表面点,为此,所述第一图像堆叠采集轴比第二图像堆叠采集轴更近于垂直于所述第一工件表面的第一部分,并且为此,至少部分基于对第一图像堆叠的分析而确定的所述聚焦曲线数据指示所述共同成像的表面点的第一3维位置,并且至少部分地基于对第二图像堆叠的分析而确定的所述聚焦曲线数据指示所述共同成像的表面点的第二3维位置,所述第二3维位置与所述第一3维位置不同,并且为此,所述第一3维位置被指示和/或确定为比所述第二3维位置更可靠,并且被用于代替所述第二3维位置用作所述工件的一组3维数据的一部分。15.根据权利要求l所述的系统,其中所述物镜具有特定的放大倍率,并且从一系列具
有不同放大倍率的物镜中选择用于所述视觉探针。16.一种测量工件表面的方法,包括:操作坐标测量机系统,所述系统包括:(i)视觉探针,其被配置为基于沿着所述视觉探针的光轴传输的图像光对工件的表面成像;(ii)滑动机构配置,其包括x轴滑动机构、y轴滑动机构和z轴滑动机构,它们各自配置为在机器坐标系内分别在相互正交的x轴、y轴和z
‑
轴方向上移动所述视觉探针;和(iii)旋转机构,其联接在所述z轴滑动机构和所述视觉探针之间,并且被配置为将所述视觉探针相对于所述机器坐标系的z轴旋转至不同的角度方向;使用所述旋转机构调整所述视觉探针的方向,以使所述视觉探针的光轴指向所述工件的表面,其中所述视觉探针的光轴不平行于所述机器坐标系的z轴,并且对应于图像堆叠采集轴;采集包括多个图像的图像堆叠,每个图像对应于所述视觉探针沿着所述图像堆叠采集轴的聚焦位置,其中采集所述图像堆叠包括:调节多个所述滑动机构,以将所述视觉探针从各自沿着所述图像堆叠采集轴的第一图像采集位置移动到第二图像采集位置,其中所述视觉探针分别在第一图像采集位置和第二图像采集位置采集多个图像的第一图像和第二图像;和调节所述多个滑动机构,以将所述视觉探针从也沿着所述图像堆叠采集轴的所述第二图像采集位置移动到第三图像采集位置,其中所述视觉探针在所述第三图像采集位置采集多个图像的第三图像;和至少部分地基于对所述图像堆叠的图像的分析确定聚焦曲线数据,其中所述聚焦曲线数据指示工件表面上的多个表面点的3维位置。17.根据权利要求16所述的方法,其还包括:在屏幕上显示所述工件表面的3维表示。18.根据权利要求16所述的方法,其中使用所述旋转机构调节所述视觉探针的方向包括将所述视觉探针的光轴设置为大致垂直于所述工件表面的至少一部分,并且为此在采集所述图像堆叠期间不进一步调节所述视觉探针的方向并保持近似恒定。19.根据权利要求16所述的方法,其中所述工件表面是第一工件表面,并且所述视觉探针的方向是第一方向,并且所述图像堆叠是利用所述视觉探针以所述第一方向采集的第一图像堆叠,并且所述方法进一步包括:在不同于所述第一方向的第二方向上用所述视觉探针并且以指向所述工件的第二工件表面的所述视觉探针的光轴采集第二图像堆叠,所述第二工件表面以与所述第一工件表面不同的角度定向。20.根据权利要求19所述的方法,其还包括:至少部分地基于对所述第二图像堆叠的分析确定第二聚焦曲线数据,其中第二聚焦曲线数据指示所述工件的第二工件表面上的多个表面点的3维位置。21.根据权利要求20所述的方法,其还包括:至少根据基于对第一图像堆叠的分析而不是基于对第二图像堆叠的分析而确定的所述聚焦曲线数据来显示所述第一工件表面的至少一部分的3维表示;和至少根据基于对第二图像堆叠的分析而不是基于对第一图像堆叠的分析而确定的第二聚焦曲线数据来显示所述第二工件表面的至少一部分的3维表示。
技术总结
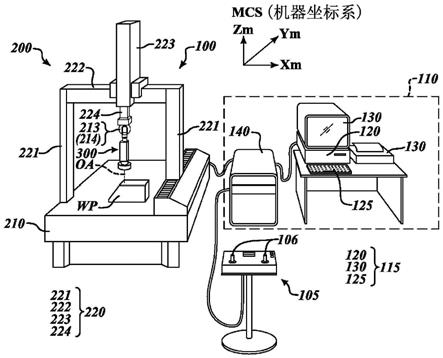
提供了一种坐标测量机(CMM)系统,其包括利用视觉探针(例如,用于执行用于确定和/或测量工件的表面轮廓的操作等)。可以使用旋转机构调节视觉探针的角度方向,以使视觉探针的光轴指向工件的成角度表面(例如,在某些实施方式中光轴可以近似垂直于成角度的工件表面)。x轴、y轴和z轴滑动机构(例如,在相互正交的方向上移动)可以一起将视觉探针沿图像堆叠采集轴(其可与光轴大致重合)移动到采集位置以采集成角度的工件表面的图像堆叠。聚焦曲线数据可以从对图像堆叠的分析确定,该分析指示工件的成角度的表面上的表面点的3维位置。成角度的表面上的表面点的3维位置。成角度的表面上的表面点的3维位置。
技术研发人员:T.M.埃尔斯
受保护的技术使用者:株式会社三丰
技术研发日:2021.05.25
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。