1.本发明具体涉及一种基于视觉导航的变电站智能无人机巡检方法。
背景技术:
2.近年来电网规模不断扩大,变电站和设备快速增长,巡检人员不足的形势日益严峻,承载力面临极大挑战。目前,现行变电巡检普遍采用人工步行的巡检方式,存在以下四点突出问题:(1)人工逐站逐设备步行巡检,巡检耗时长、人力消耗大、效率低;(2)人工“用肉眼观察、凭经验判断”的巡检方式,极易出现缺陷未识别、判断不到位的情况,整体巡检质量低,漏判错判多;(3)巡检周期长,缺陷易发展,受人力制约,定期巡视一月一巡,缺陷能够在巡检“空白期”发展,存在隐患;(4)巡检数据多,人工易出错,“现场采集、返回录入”的数据处理方式,容易降低系统数据的可靠性。
3.有鉴于此,本发明提出一种基于视觉导航的变电站智能无人机巡检方法。
技术实现要素:
4.本发明的目的在于提供一种基于视觉导航的变电站智能无人机巡检方法,基于人工巡检通道的颜色同周围背景差异大的特点(变电站地面均有人工巡检通道,一般为黄色边框),可以直接利用hsi颜色空间的色彩信息来分割出巡检通道,通过图像坐标系到地面三维坐标系的转换即可规划出无人机自动飞行巡检的安全轨迹空间。
5.为了实现上述目的,所采用的技术方案为:
6.一种基于视觉导航的变电站智能无人机巡检方法,包括以下步骤:
7.(1)采集变电站人工巡视通道图像,对无人机摄像头采集的变电站图像进行分割;
8.(2)对所述的步骤(1)获得的分割结果,遍历分割图像列,获得像素差别明显的分割点;
9.(3)将所述的分割点拟合出变电站人工巡视通道;
10.(4)通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间,实现智能巡检。
11.进一步地,所述的步骤(1)中,采集变电站人工巡视通道图像,构建基于hsi颜色空间的rce神经网络分类算法,从中分割出变电站人工巡视通道,从而对无人机摄像头采集的变电站图像进行分割。
12.进一步地,所述的步骤(3)中,通过最小二乘法拟合出变电站人工巡视通道。
13.相对于现有技术,本发明的有益效果在于:
14.本发明提出了一种基于视觉导航的变电站智能无人机巡检方法,利用利用变电站地面均有人工巡检通道(一般为黄色边框)颜色同周围背景差异大的已有条件,构建基于hsi颜色空间的rce神经网络分类算法,分割出变电站人工巡视通道,进而规划出无人机自动飞行巡检的安全轨迹空间,可以避免在变电站配置位置坐标传感器或者为无人机装设激光导航,有效降低实施成本。从而一方面有利于提升无人机巡检变电站的智能化水平和效
率,另一方面又有助于促进人工智能在输变电设备智能巡检中的应用。
附图说明
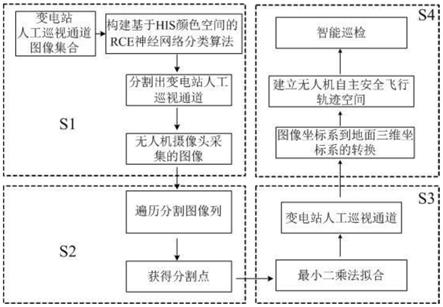
15.图1为本发明一种基于视觉导航的变电站智能无人机巡检方法的工作流程图;
16.图2为变电站人工巡视通道分割示意图。
具体实施方式
17.为了进一步阐述本发明一种基于视觉导航的变电站智能无人机巡检方法,达到预期发明目的,以下结合较佳实施例,对依据本发明提出的一种基于视觉导航的变电站智能无人机巡检方法,其具体实施方式、结构、特征及其功效,详细说明如后。在下述说明中,不同的“一实施例”或“实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构或特点可由任何合适形式组合。
18.下面将结合具体的实施例,对本发明一种基于视觉导航的变电站智能无人机巡检方法做进一步的详细介绍:
19.本发明首先构建基于hsi颜色空间的rce神经网络分类算法分割出变电站人工巡视通道;其次利用得到的这些分割点,通过最小二乘法拟合出变电站人工巡视通道;最后,通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间,实现智能巡检。
20.本发明的技术方案为:
21.一种基于视觉导航的变电站智能无人机巡检方法,包括以下步骤:
22.(1)采集变电站人工巡视通道图像,对无人机摄像头采集的变电站图像进行分割;
23.(2)对所述的步骤(1)获得的分割结果,遍历分割图像列,获得像素差别明显的分割点;
24.(3)将所述的分割点拟合出变电站人工巡视通道;
25.(4)通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间,实现智能巡检。
26.优选地,所述的步骤(1)中,采集变电站人工巡视通道图像,构建基于hsi颜色空间的rce神经网络分类算法,从中分割出变电站人工巡视通道,从而对无人机摄像头采集的变电站图像进行分割。
27.优选地,所述的步骤(3)中,通过最小二乘法拟合出变电站人工巡视通道。
28.实施例1.
29.工作流程图如图1所示,具体操作步骤如下:
30.s1:首先,采集变电站人工巡视通道图像,构建基于hsi颜色空间的rce神经网络分类算法,从中分割出变电站人工巡视通道。从而对无人机摄像头采集的变电站图像进行分割。变电站人工巡视通道分割示意图如图2所示。
31.s2:得到分割结果后,再遍历分割图像列,就可以获得那些分割像素值与周围像素差别明显分割点。
32.s3:进而利用得到的这些分割点,通过最小二乘法拟合出变电站人工巡视通道。
33.s4:最后,通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨
迹空间,实现智能巡检。
34.本发明首先构建基于hsi颜色空间的rce神经网络分类算法分割出变电站人工巡视通道;其次利用得到的这些分割点,通过最小二乘法拟合出变电站人工巡视通道;最后,通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间,实现智能巡检。
35.以上所述,仅是本发明实施例的较佳实施例而已,并非对本发明实施例作任何形式上的限制,依据本发明实施例的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明实施例技术方案的范围内。
技术特征:
1.一种基于视觉导航的变电站智能无人机巡检方法,其特征在于,包括以下步骤:(1)采集变电站人工巡视通道图像,对无人机摄像头采集的变电站图像进行分割;(2)对所述的步骤(1)获得的分割结果,遍历分割图像列,获得像素差别明显的分割点;(3)将所述的分割点拟合出变电站人工巡视通道;(4)通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间,实现智能巡检。2.根据权利要求1所述的变电站智能无人机巡检方法,其特征在于,所述的步骤(1)中,采集变电站人工巡视通道图像,构建基于hsi颜色空间的rce神经网络分类算法,从中分割出变电站人工巡视通道,从而对无人机摄像头采集的变电站图像进行分割。3.根据权利要求1所述的变电站智能无人机巡检方法,其特征在于,所述的步骤(3)中,通过最小二乘法拟合出变电站人工巡视通道。
技术总结
本发明为一种基于视觉导航的变电站智能无人机巡检方法。一种基于视觉导航的变电站智能无人机巡检方法,包括:(1)采集变电站人工巡视通道图像,对无人机摄像头采集的变电站图像进行分割;(2)对分割结果进行遍历分割图像列,获得分割点;(3)将所述的分割点拟合出变电站人工巡视通道;(4)通过图像坐标系到地面三维坐标系的转换,建立无人机自主安全飞行轨迹空间。本发明所述的一种基于视觉导航的变电站智能无人机巡检方法,一方面有利于提升无人机巡检变电站的智能化水平和效率,另一方面又有助于促进人工智能在输变电设备智能巡检中的应用。用。用。
技术研发人员:李宇恒 郑炅 董一博 冯中涵
受保护的技术使用者:新疆大学
技术研发日:2021.09.08
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。