技术特征:
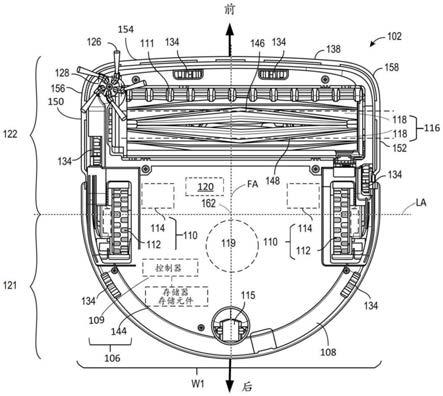
1.一种移动清洁机器人,包括:驱动系统,其被配置为使移动清洁机器人围绕环境移动;传感器电路,其被配置为检测环境中的物体;和处理器电路,其被配置为:接收任务例程,所述任务例程包括表示可编辑时间表的数据,所述可编辑时间表包括用于相对于语义注释物体执行一个或多个作业的时间或顺序中的至少一项,所述语义注释物体包括检测到的物体的空间或情境信息;和根据所述任务例程导航所述移动清洁机器人以进行任务。2.根据权利要求1所述的移动清洁机器人,其中:所述传感器电路还被配置为识别环境中的检测到的物体的空间位置;和所述控制器电路被配置为将检测到的物体与所识别的空间位置相关联以创建所述语义注释物体,并且使用所述语义注释物体来生成或修改所述任务例程。3.根据权利要求2所述的移动清洁机器人,其中,检测到的物体包括家具或陈设,并且所述控制器电路被配置为:识别所述家具或陈设所在的房间或环境中的区域;将所述家具或陈设与识别的房间相关联;和基于所述家具或陈设与识别的房间或区域之间的关联,生成或修改所述任务例程。4.根据权利要求1所述的移动清洁机器人,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以其与所述语义注释物体的空间或情境关系为特征。5.根据权利要求1所述的移动清洁机器人,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以与其进行的用户交互为特征。6.根据权利要求1所述的移动清洁机器人,其中,用于执行所述一个或多个作业的可编辑时间表是关于用户行为的,以及其中,所述控制器电路被配置为接收关于用户行为的信息,并基于可编辑时间表和所接收的关于所述用户行为的信息来导航所述移动清洁机器人以执行任务。7.根据权利要求6所述的移动清洁机器人,其中,所述控制器电路被配置为基于所接收的关于用户行为的信息来修改用于执行所述一个或多个作业的时间或顺序中的至少一项。8.根据权利要求7所述的移动清洁机器人,其中,关于用户行为的信息包括关于指示目标房间中的人的存在或不存在的房间占用的信息,以及其中,所述控制器电路被配置为基于关于房间占用的信息来暂停任务或重新安排要在目标房间中执行的作业。9.根据权利要求7所述的移动清洁机器人,其中,关于用户行为的信息包括关于用户参与音频敏感事件的信息,以及其中,所述控制器电路被配置为暂停任务,或重新安排干扰音频敏感事件的作业。10.根据权利要求1所述的移动清洁机器人,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以其中的相应碎屑状态为特征,并且其中:
所述传感器电路被配置为检测一个或多个房间或地板表面区域中的脏污或碎屑分布的相应水平;和所述控制器电路被配置为通过相应的脏污水平或碎屑分布来优先清洁所述一个或多个房间或地板表面区域。11.根据权利要求10所述的移动清洁机器人,其中,所述一个或多个作业包括具有比第二区域更高的脏污水平的第一区域,所述第二区域具有比第三区域更高的脏污水平,并且其中,所述控制器电路被配置为导航所述移动清洁机器人以顺序地首先清洁所述第一区域,随后清洁所述第二区域,随后清洁所述第三区域。12.根据权利要求1所述的移动清洁机器人,其中,所述任务例程还包括表示目标区域中的清洁水平的清洁模式,并且其中,所述控制器电路被配置为与光源通信以调整所述目标区域的照明,并导航所述移动清洁机器人以清洁具有调整后的照明的目标区域。13.根据权利要求1所述的移动清洁机器人,其中,所述控制器电路被配置为生成关于其中的作业或任务的进度的任务状态报告,所述任务状态报告包括用于其中的作业或任务的经过时间、剩余时间估计或总体时间估计中的至少一项。14.根据权利要求1所述的移动清洁机器人,其中,所述控制器电路被配置为基于用于完成任务的时间分配来优先执行所述任务例程中的作业。15.根据权利要求1所述的移动清洁机器人,其中,所述控制器电路被配置为生成或更新包括关于所述语义注释物体的信息的环境的地图,并且使用所生成的地图来导航所述移动清洁机器人。16.一种非暂时性机器可读存储介质,其包括指令,所述指令在由机器的一个或多个处理器执行时使所述机器执行包括以下内容的操作:在机器和配置为围绕环境移动的至少一个移动清洁机器人之间建立通信;控制所述至少一个移动清洁机器人以检测环境中的物体;接收任务例程,所述任务例程包括表示可编辑时间表的数据,所述可编辑时间表包括用于相对于语义注释物体执行一个或多个清洁作业的时间或顺序中的至少一项,所述语义注释物体包括检测到的物体的空间或情境信息;在显示器上呈现所述任务例程的图形表示;和根据所述任务例程导航所述至少一个移动清洁机器人以进行任务。17.根据权利要求16所述的非暂时性机器可读存储介质,其中,所述指令使所述机器执行还包括以下内容的操作:在包括第一移动清洁机器人和不同的第二移动机器人的环境中协调一组移动机器人,所述可编辑时间表包括用于执行由第一移动清洁机器人执行的一个或多个作业和由第二移动机器人执行的一个或多个作业的时间或顺序中的至少一项。18.根据权利要求17所述的非暂时性机器可读存储介质,其中,所述指令使所述机器执行还包括以下内容的操作:响应于用户输入,在用户界面上在所述第一移动清洁机器人的操作状态的呈现与所述第二移动清洁机器人的操作状态的呈现之间进行切换。19.根据权利要求17所述的非暂时性机器可读存储介质,其中,协调一组移动机器人的操作包括向该组添加新的移动机器人或从该组中移除现有的机器人。20.根据权利要求16所述的非暂时性机器可读存储介质,其中,所述一个或多个作业包
括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以其与所述语义注释物体的空间或情境关系为特征。21.根据权利要求16所述的非暂时性机器可读存储介质,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以与之进行的用户交互为特征。22.根据权利要求16所述的非暂时性机器可读存储介质,其中,用于执行所述一个或多个作业的可编辑时间表是关于用户行为的,以及其中,所述指令使所述机器执行还包括以下内容的操作:接收关于用户行为的信息;以及基于所述可编辑时间表和所接收的关于用户行为的信息,导航所述至少一个移动清洁机器人以执行任务。23.根据权利要求22所述的非暂时性机器可读存储介质,其中,关于用户行为的信息包括指示房间中的人的存在或不存在的房间占用,以及其中,所述指令使所述机器执行操作,所述操作还包括暂停任务或重新安排要在被占用的房间中执行的作业。24.根据权利要求22所述的非暂时性机器可读存储介质,其中,关于用户行为的信息包括音频敏感事件,以及其中,所述指令使所述机器执行操作,所述操作还包括暂停任务或重新安排干扰音频敏感事件的作业。25.根据权利要求16所述的非暂时性机器可读存储介质,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域以其中的相应碎屑状态为特征,并且其中,所述指令使所述机器执行操作,所述操作还包括:检测一个或多个房间或地板表面区域中的脏污或碎屑分布的相应水平;和通过相应的脏污水平或碎屑分布来优先清洁所述一个或多个房间或地板表面区域。26.一种手持计算设备,包括:用户界面;通信电路,被配置为与围绕环境移动的第一移动清洁机器人进行通信;和处理器,被配置为:从所述第一移动清洁机器人接收关于在环境中检测到的物体的信息;接收任务例程,所述任务例程包括表示可编辑时间表的数据,所述可编辑时间表包括用于相对于语义注释物体执行一个或多个清洁作业的时间或顺序中的至少一项,所述语义注释物体包括检测到的物体的空间和情境信息;和生成用于根据所述任务例程导航所述第一移动清洁机器人以进行任务的指令;其中,所述用户界面被配置为在单独的类别中显示所述第一移动清洁机器人和任务例程的图形表示。27.根据权利要求26所述的手持计算设备,其中:所述处理器被配置为生成关于其中的作业或任务的进度的任务状态报告,所述任务状态报告包括用于其中的作业或任务的经过时间、剩余时间估计或总体时间估计中的至少一项;以及所述用户界面被配置为在单独的类别中显示任务状态报告的图形表示。
28.根据权利要求26所述的手持计算设备,其中:所述处理器被配置为协调环境中的一组移动机器人,包括第一移动清洁机器人和不同的第二移动机器人;和所述用户界面包括一个或多个用户控件,所述一个或多个用户控件使用户能够在第一移动清洁机器人的操作状态的第一图形表示与第二移动机器人的操作状态的第二图形表示之间进行切换。29.根据权利要求28所述的手持计算设备,其中,所述用户界面包括一个或多个用户控件,所述一个或多个用户控件使用户能够协调所述一组移动机器人,包括向所述组添加新的移动机器人或从所述组中移除现有的机器人。30.根据权利要求26所述的手持计算设备,其中,所述用户界面被配置为显示所述任务例程的图形表示,所述图形表示包括以相应房间或环境中的表面区域中的相应语义注释物体为特征的一个或多个作业的缩进列表。31.根据权利要求26所述的手持计算设备,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以其与所述语义注释物体的空间或情境关系为特征。32.根据权利要求26所述的手持计算设备,其中,所述一个或多个作业包括清洁一个或多个房间或地板表面区域,所述一个或多个房间或地板表面区域分别以与之进行的用户交互为特征。33.根据权利要求26所述的手持计算设备,其中,用于执行所述一个或多个作业的可编辑时间表是关于用户行为的,以及其中,处理器被配置为接收关于用户行为的信息,并基于可编辑时间表和所接收的关于用户行为的信息来生成用于导航移动清洁机器人以执行任务的指令。34.根据权利要求26所述的手持计算设备,其中,所述用户界面被配置为从用户接收关于所述任务例程的语音命令。
技术总结
本文描述了用于使用基于情境和用户经验的任务例程来调度和控制移动机器人的系统,设备和方法。在一个示例中,移动清洁机器人包括:驱动系统,其使移动清洁机器人围绕环境移动;传感器电路,用于检测环境中的物体;以及控制器电路,用于接收任务例程,该任务例程包括表示可编辑时间表的数据,可编辑时间表包括相对于语义注释物体或相对于用户经验或用于行为执行一个或多个清洁作业的时间或顺序中的至少一个,语义注释物体包括检测到的物体的空间或情境信息。控制器电路根据任务例程导航移动清洁机器人以进行任务。清洁机器人以进行任务。清洁机器人以进行任务。
技术研发人员:R.施奈德 C.M.巴特沃思 S.洪 S.齐克勒 S.科德尔 H.W.白 F.贾奇 N.贾巴维 J.霍尔科姆 S.A.凯斯 D.M.麦克斯维尼 B.罗勒 R.胡布勒 O.S.尼
受保护的技术使用者:美国iRobot公司
技术研发日:2021.05.25
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。