一种基于混合可见光和ble的室内定位方法
技术领域
1.本发明涉及室内定位技术领域,特别是一种基于混合可见光和ble的室内定位方法。
背景技术:
2.随着移动无线通信装置设备的普及以及人们对基于位置的服务(如商场中的导购服务、广告的精准推送服务、博物馆中藏品信息推送等)的需求越来越大,各种室内定位方法被广泛关注与研究。但是很多室内定位方法存在定位不够精确、系统不稳定等诸多问题,无法很好地满足用户的需求。
3.目前主要的室内定位技术有:wifi、低功耗蓝牙(bluetooth low energy,ble)、可见光、射频识别(radio frequency identification,rfid)技术等。射频识别技术没有通信能力,还没得到移动设备的支持,使之成为定位技术的瓶颈。wifi和ble是目前室内定位中比较热门的两个技术,wifi信号分布广泛,但是wifi设备功耗较高,续航能力较差,并且wifi信号容易受到干扰的影响,导致定位精度不高,某些情况下无法满足人们的定位精度需求。
4.低功耗蓝牙具有体积小、功耗低、易部署的特点,因此低功耗蓝牙被广泛应用于室内定位领域,蓝牙5.1标准在蓝牙广播包中增加了信号到达角附加参数,提高了基于低功耗蓝牙的室内定位精度。可见光具有高的覆盖率,并且基于可见光的室内定位具有高的精准度。将可见光和ble进行融合用于室内定位能够提高室内定位的精准度,满足室内定位服务的精度需求。
5.与本发明最相似的现有技术实现方案:
6.(1)申请号为201711062995.4的基于蓝牙、wifi和声波的混合室内定位方法及系统;
7.该发明提出了一种基于蓝牙、wifi和声波的混合室内定位方法及系统,使用基站播发wifi信号,蓝牙信号和经过时间对齐和信号调制的音频信号;用户端接收蓝牙和wifi信号的rssi,并解调音频信号的发射时间和蓝牙信号的广播电文,实现基于toa和rssi的混合测距位置计算;定位系统包括:混合室定位基站和用户设备;系统的基站之间及基站与用户端间都实现测距链路。
8.与本发明的不同点:首先,该发明没有将多个指纹特征进行融合用于定位,而本发明使用指纹融合方法将多个指纹特征融合后进行定位。其次,该发明使用wifi和蓝牙的rssi以及声波的toa来实现定位,而本发明借助ble的体积小、功耗低、易部署和可见光的高精度、覆盖范围广,将可见光的rssi和ble的aoa融合用于室内定位。
9.(2)申请号为201511033153.7的多模混合室内定位方法;
10.该发明涉及一种多模混合室内定位方法,其包括信号发射基站和信号接收端,信号发射基站发射多模混合信号,由信号接收端接收,并确定信号接收端的位置,其步骤如下:1、对多模混合信号的统一识别和转码,得到粗粒度信号,并由信号接收端接收;2、对
rssi粗略值进行初期校正,3、采用基于堆栈式集合的均值信号二次校正方法,4、采用三角质心算法建模进行计算,得出接收端位置。
11.与本发明的不同点:首先,该发明使用几何定位方法,而本发明使用指纹定位方法。其次,该发明采用rssi值即单个特征进行定位,本发明使用指纹融合方法将可见光的rssi和ble的aoa多个特征指纹融合进行定位。最后,该发明使用wifi信号、蓝牙信号和射频识别信号进行定位,本发明将可见光与ble信号融合用于室内定位。
12.(3)申请号为201811048145.3的一种室内定位系统及其定位方法;
13.该方法涉及定位技术领域,尤其涉及一种室内定位系统及其定位方法,包括可见光定位灯具、第一智能终端设备和第二智能终端设备,可见光定位灯具上设置有蓝牙定位信标,第一智能终端设备位于可见光定位灯具可见光覆盖的区域内,第一智能终端设备通过接收可见光定位灯具发出的可见光定位信号得出自身的位置,第二智能终端设备偏离可见光定位灯具可见光覆盖的区域,第一智能终端设备上设置有蓝牙定位信标。该方法在可见光定位灯具下,利用智能终端设备接收可见光,实现室内可见光定位,当智能终端设备偏离可见光定位灯具时,智能终端设备接收安装在可见光定位灯具的蓝牙信标信号,实现室内蓝牙定位,可以指引方向,快速引导人们到达想去的地方。
14.与本发明的不同点:该方法首先使用可见光进行定位,在偏离可见光定位灯具时再使用蓝牙进行定位,而本发明将可见光的rssi和ble的aoa进行融合后得到新的信号特征后再进行定位,实现混合可见光和ble的室内定位。
15.综上,现有技术大多采用蓝牙、wifi、射频识别信号等进行室内定位,这些信号会有功耗高、不易部署、覆盖范围有限等的限制,同时这些信号容易受到干扰,定位精度难以提高。其次,现有技术中有些只使用蓝牙、wifi、可见光等其中的一种进行定位,没有融合多种信号特征,定位精度不高。
技术实现要素:
16.本发明所要解决的技术问题是克服现有技术的不足而提供一种基于混合可见光和ble的室内定位方法,借助ble的体积小、功耗低、易部署和可见光的高精度、覆盖范围广,将可见光的rssi特征与ble的aoa特征进行融合后用于室内定位,能够提高室内定位的精准度。
17.本发明为解决上述技术问题采用以下技术方案:
18.根据本发明提出的一种基于混合可见光和ble的室内定位方法,包括以下步骤:
19.离线阶段:
20.步骤1、测量每一个参考点的可见光的rssi值与ble的aoa值,将可见光的rssi值与ble的aoa值进行归一化处理;
21.步骤2、分别计算步骤1得到的归一化处理后的可见光的rssi值与ble的aoa值的加权因子;
22.步骤3、对于每一个参考点,根据步骤2得到的加权因子,使用加权最小二乘法将归一化处理后的可见光的rssi值与ble的aoa值融合,得到每个参考点的混合特征指纹并存入指纹库;
23.步骤4、使用所有参考点的混合特征指纹对wknn模型进行训练;
24.步骤5、使用连续小波变换将步骤1中测量的各个参考点的可见光的rssi值表示成二维联合时频数据,该二维联合时频数据为m
×
t的特征矩阵,m为预设的比例因子的个数,t为信号发射点的个数;
25.步骤6、将所有参考点的二维联合时频数据对cnn模型进行训练;
26.在线阶段:
27.步骤
①
、测量目标点的可见光的rssi值与ble的aoa值,将可见光的rssi值与ble的aoa值进行归一化处理;
28.步骤
②
、分别计算归一化处理后的目标点的可见光的rssi值与ble的aoa值的加权因子;
29.步骤
③
、使用加权最小二乘法将归一化处理后的目标点的可见光的rssi值与ble的aoa值融合,得到目标点的混合特征指纹。
30.步骤
④
、使用连续小波变换将步骤
①
中测量的目标点的可见光的rssi值表示成二维联合时频数据;
31.步骤
⑤
、将步骤
④
目标点的二维联合时频数据输入离线阶段训练好的cnn模型,cnn模型中的softmax层输出各个参考点与目标点之间的匹配概率;
32.步骤
⑥
、在所有参考点中选取与目标点之间的匹配概率最大的三个参考点作为wknn模型的三个样本点;
33.步骤
⑦
、根据步骤
⑥
选取的三个样本点与目标点之间的匹配概率进行wknn权值的推算,得到各自的权值;
34.步骤
⑧
、将目标点的混合特征指纹、三个样本点的混合特征指纹以及三个样本点各自的权值输入离线阶段训练好的wknn模型计算得到目标点的位置。
35.作为本发明所述的一种基于混合可见光和ble的室内定位方法进一步优化方案,步骤1
‑
步骤3具体如下:
36.首先分别测量获取到t个信号发射点在参考点处的可见光rssi值q=[q1,q2,...,q
t
]和ble的aoa值θ=[θ1,θ2,...,θ
t
],光功率值作为可见光rssi值,对第t个信号发射点在参考点处的可见光rssi值q
t
进行归一化处理、得到归一化处理后的参考点的可见光rssi值x1,使x1在[0,1]区间内,t=1,2,...t,计算第t个信号发射点在参考点处的aoa值θ
t
的余弦值后再取绝对值得到归一化处理后的参考点的ble的aoa值x2,x2的取值也在[0,1]区间内,x1和x2的计算公式如下:
[0037][0038]
x2=|cos(θ
t
)|;
[0039]
q
max
为q中的最大值;
[0040]
然后取可见光rssi值和ble的aoa值的加权因子分别为w1和w2,加权因子的计算公式如下所示:
[0041]
[0042][0043]
和分别为x1和x2的均方误差,计算公式如下所示:
[0044][0045]
最后使用加权最小二乘算法将x1和x2进行融合,得到混合特征y
t
,y
t
表示第t个信号发射点的信号在参考点处的特征;
[0046]
y
t
计算公式如下所示:
[0047]
计算出所有信号发射点的信号在参考点处的特征,得到该参考点的混合特征指纹y=[y1,y2,y3,...,y
t
]并存入指纹库。
[0048]
作为本发明所述的一种基于混合可见光和ble的室内定位方法进一步优化方案,步骤5
‑
6具体如下:
[0049]
将步骤1测量得到的可见光的rssi值作为时间序列数据映射为二维联合时频数据。步骤1测量得到的可见光的rssi值z是一个数值数组,表示如下所示:
[0050][0051]
其中,n为参考点个数,z
n
对应于一个稳定的可见光rssi样本,即每个信号发射点的信号在第n个参考点处的rssi测量值,z
n
=[z
n
(1),z
n
(2),z
n
(3),...,z
n
(t)],t为信号发射点个数,z
n
(t)为第t个信号发射点的信号在第n个参考点处的rssi测量值,预设m个比例因子α1,α2,....,α
m
,α
m
为第m个比例因子,对z
n
(t)进行连续小波变换后得到计算公式如下所示,n=1,2,3,...,n;t=1,2,3,...,t;
[0052][0053]
其中,ψ(x)表示小波函数,x为变量,m=1,2,...,m,k为常数,z
n
(k)为第k个信号发射点的信号在第n个参考点处的rssi测量值,为该参考点的m
×
t的特征矩阵中第m行第t列的元素,*表示复共轭算子,小波函数公式如下所示:
[0054][0055]
其中,e为自然底数;
[0056]
对z中的每一行rssi数据即z
n
进行连续小波变换,将一维信号转化成二维数据,得到n个参考点的m
×
t的特征矩阵,上述n个参考点的m
×
t的特征矩阵将用作后续cnn模型的训练样本;
[0057]
cnn模型有四个隐藏层和一个全连接层。
[0058]
作为本发明所述的一种基于混合可见光和ble的室内定位方法进一步优化方案,
[0059]
步骤
⑦
中,选取的3个参考点的权值计算如下所示:
[0060][0061]
其中,p
i
表示选中的第i个参考点与目标点之间的匹配概率,w
i
表示第i个参考点的权值。
[0062]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0063]
本发明使用加权最小二乘法将可见光的rssi数据与ble的aoa数据融合,将多个指纹特征融合,增强了指纹特征的表达,一定程度上解决使用单个指纹特征定位时的精度不高问题;使用连续小波变换将稳定的一维可见光rssi数据表示成二维联合时频数据,能够为cnn预测参考点概率提供更多的鉴别信息,借助cnn处理二维数据的优势,使用cnn能够预测到更加准确的各个参考点与目标点之间的匹配概率。将上述概率用于wknn的样本点选取和权值推算,能够提高室内定位的精准度。
附图说明
[0064]
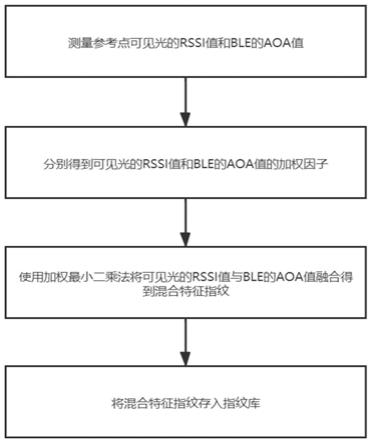
图1是混合可见光强度和ble信号到达角的指纹构建方法流程图。
[0065]
图2是基于卷积神经网络的最近邻参考点概率预测方法流程图。
[0066]
图3是基于混合可见光和ble的室内定位方法的流程图。
具体实施方式
[0067]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0068]
本发明提出一种基于混合可见光和ble的室内定位方法。使用一种混合可见光强度和ble信号到达角的指纹构建方法构建离线阶段参考指纹。具体地,使用加权最小二乘法融合可见光的rssi数据与ble的aoa数据得到混合特征指纹,用作后续在线定位阶段的参考指纹。使用一种基于cnn的最近邻参考点概率预测方法对各个参考点与目标点之间的匹配概率进行预测。具体地,首先使用连续小波变换将稳定的可见光rssi样本作为时间序列数据映射为二维联合时频数据,在不同的时间尺度上提供良好的特征表示;然后借助cnn处理二维数据的优势,使用cnn有效捕获数据结构,准确预测各参考点与目标点之间的匹配概率,将得到的概率用于后续wknn的样本点选取以及权值推算。使用一种基于参考点概率的改进wknn定位模型计算目标点的精确位置。具体地,首先从参考点中选择概率最大的三个点作为wknn的样本点;然后根据上述三个样本点的概率推算wknn的权值;最后将离线指纹库中上述三个样本点对应的指纹信息、在线测得的目标点的指纹信息以及推算得到的权值输入wknn后得到目标点的精确位置。本发明的具体实施步骤如下。基于混合可见光和ble的室内定位方法的流程图如图3所示。
[0069]
离线阶段:
[0070]
步骤1:测量每一个参考点的可见光的rssi值与ble的aoa值,将可见光的rssi值与ble的aoa值进行归一化处理。
[0071]
步骤2:分别计算步骤1得到的归一化处理后的可见光的rssi值与ble的aoa值的加
权因子。
[0072]
步骤3:对于每一个参考点,根据步骤2得到的加权因子,使用加权最小二乘法将归一化处理后的可见光的rssi值与ble的aoa值融合,得到每个参考点的混合特征指纹并存入指纹库。
[0073]
步骤4:使用上述所有参考点的混合特征指纹对wknn模型进行训练。
[0074]
步骤5:使用连续小波变换将步骤1中测量的各个参考点的可见光rssi值表示成二维联合时频数据,该数据为m
×
t的特征矩阵,m为预设的比例因子的个数,t为信号发射点的个数。
[0075]
步骤6:使用所有参考点的二维联合时频数据对cnn模型进行训练。
[0076]
在线阶段:
[0077]
步骤
①
:测量目标点的可见光的rssi值与ble的aoa值,将可见光的rssi值与ble的aoa值进行归一化处理。
[0078]
步骤
②
:分别计算归一化处理后的目标点的可见光的rssi值与ble的aoa值的加权因子。
[0079]
步骤
③
:使用加权最小二乘法将归一化处理后的目标点的可见光的rssi值与ble的aoa值融合,得到目标点的混合特征指纹。
[0080]
步骤
④
:使用连续小波变换将步骤
①
中测量的目标点的可见光rssi值表示成二维联合时频数据。
[0081]
步骤
⑤
:将步骤
④
目标点的二维联合时频数据输入离线阶段训练好的cnn模型,cnn模型中的softmax层输出各个参考点与目标点之间的匹配概率。
[0082]
步骤
⑥
:在所有参考点中选取与目标点之间匹配概率最大的三个参考点作为wknn模型的三个样本点。
[0083]
步骤
⑦
:根据步骤
⑥
选取的三个样本点与目标点之间的匹配概率进行wknn权值的推算,得到各自的权值。
[0084]
步骤
⑧
:将目标点的混合特征指纹、三个样本点的混合特征指纹以及三个样本点各自的权值输入离线阶段训练好的wknn模型计算得到目标点的位置。
[0085]
本发明提出一种基于混合可见光和ble的室内定位方法。使用一种混合可见光强度和ble信号到达角的指纹构建方法构建离线阶段参考指纹。具体地,使用加权最小二乘法(weighted least square,wls)融合可见光接收信号强度指示(received signal strength indication,rssi)数据与低功耗蓝牙到达角度(angle of arrival,aoa)数据得到混合特征指纹,用作后续在线定位阶段的参考指纹。使用一种基于卷积神经网络(convolutional neural network,cnn)的最近邻参考点概率预测方法对各个参考点与目标点之间的匹配概率进行预测。具体地,首先使用连续小波变换(continuous wavelet transform,cwt)将稳定的可见光rssi样本作为时间序列数据映射为二维联合时频数据,在不同的时间尺度上提供良好的特征表示;然后借助cnn处理二维数据的优势,使用cnn有效捕获数据结构,准确预测各参考点与目标点之间的匹配概率,将得到的概率用于后续加权k最邻近算法(weight k
‑
nearest neighbor,wknn)的样本点选取以及权值推算。使用一种基于参考点概率的改进wknn定位模型计算目标点的精确位置。具体地,首先从参考点中选择概率最大的三个点作为wknn的样本点;然后根据上述三个样本点的概率推算wknn的权值;
最后将离线指纹库中上述三个样本点对应的指纹信息、在线测得的目标点的指纹信息以及推算得到的权值输入wknn后得到目标点的精确位置。
[0086]
本发明使用加权最小二乘法将可见光的rssi数据与ble的aoa数据融合,将多个指纹特征融合,增强了指纹特征的表达,一定程度上解决使用单个指纹特征定位时的精度不高问题。使用连续小波变换将稳定的一维可见光rssi数据表示成二维联合时频数据,能够为cnn预测参考点概率提供更多的鉴别信息,借助cnn处理二维数据的优势,使用cnn能够预测到更加准确的各个参考点与目标点之间的匹配概率。将上述概率用于wknn的样本点选取和权值推算,能够提高室内定位的精准度。
[0087]
一、一种混合可见光强度和ble信号到达角的指纹构建方法
[0088]
针对使用单个指纹特征时定位精度不高的问题,本发明提出一种混合可见光和ble的指纹构建方法,实现更高精度的室内定位。本方法基于拓扑指纹,使用加权最小二乘法将测量得到的可见光rssi数据与低功耗蓝牙aoa数据进行融合,得到混合特征指纹存入指纹库,用作后续在线定位阶段的参考指纹。本方法增强了指纹特征的表达,融合了多个指纹特征后比基于单个指纹特征定位方法具有更高的定位精度,能够实现对目标的高精准度定位。
[0089]
具体地,混合可见光和ble的指纹构建方法流程图如图1所示。首先分别测量获取到t个信号发射点在参考点处的可见光rssi值q=[q1,q2,...,q
t
]和ble的aoa值θ=[θ1,θ2,...,θ
t
],光功率值作为可见光rssi值,对第t(t=1,2,...t)个信号发射点在参考点处的可见光rssi值q
t
进行归一化处理得到归一化处理后的参考点的可见光rssi值x1,使x1在[0,1]区间内,计算第t个信号发射点在参考点处的aoa值θ
t
的余弦值后再取绝对值得到归一化处理后的参考点的ble的aoa值x2,x2的取值也在[0,1]区间内,x1和x2的计算公式如下:
[0090][0091]
x2=|cos(θ
t
)|
[0092]
q
max
为q中的最大值
[0093]
然后取可见光rssi值和ble的aoa值的加权因子分别为w1和w2,加权因子的计算公式如下所示:
[0094][0095][0096]
和分别为x1和x2的均方误差,计算公式如下所示:
[0097][0098]
最后使用加权最小二乘算法将x1和x2进行融合,得到混合特征y
t
,y
t
表示第t个信号的发射点的信号在参考点处的特征,t=1,2,
…
,t,t为信号发射点个数,计算公式如下所示:
[0099][0100]
计算出所有信号发射点的信号在参考点处的特征,得到该参考点的混合特征指纹y=[y1,y2,y3,
…
,y
t
]并存入指纹库。
[0101]
二、一种基于卷积神经网络的最近邻参考点概率预测方法
[0102]
wknn算法用于计算目标点的位置时需要输入参考点的指纹信息和对应的权值。本发明提出一种基于cnn的最近邻参考点概率预测方法,分别预测出每个参考点与目标点之间的匹配概率,即每个参考点与目标点之间的匹配程度,后续在线定位阶段选取与目标点之间匹配概率最高的3个参考点的混合特征指纹输入wknn,并且根据预测得到的参考点与目标点之间的匹配概率推算出选取的3个参考点的权值。首先,使用基于cwt的可见光rssi特征表示方法,将稳定可见光rssi样本作为时间序列数据映射为二维联合时频数据,在不同的时间尺度上提供良好的特征表示,通过使用可见光rssi数据的时间和频率表示,能够为cnn预测参考点概率提供更多的鉴别信息。然后,借助cnn处理二维数据的优势,使用cnn有效地捕获数据的结构,能够实现对各个参考点与目标点之间匹配概率的准确预测。将得到的匹配概率用于后续wknn的样本点选取以及权值推算。
[0103]
具体地,基于卷积神经网络的最近邻参考点概率预测方法流程图如图2所示。首先使用基于cwt的可见光rssi特征表示方法,将步骤1测量得到的可见光rssi值作为时间序列数据映射为二维联合时频数据。步骤1测量得到的可见光rssi值z是一个数值数组,表示如下所示:
[0104][0105]
其中n为参考点个数,z
n
对应于一个稳定的可见光rssi样本,即每个信号发射点的信号在第n个参考点处的rssi测量值,z
n
=[z
n
(1),z
n
(2),z
n
(3),...,z
n
(t)],t为信号发射点个数,z
n
(t)为第t个信号发射点的信号在第n个参考点处的rssi测量值,自定义m个比例因子α1,α2,...,α
m
,对z
n
(t)进行连续小波变换后得到计算公式如下所示,n=1,2,3,...,n;t=1,2,3,...,t
[0106][0107]
其中,ψ(x)表示小波函数,x为变量,m=1,2,...,m,为该参考点的m
×
t的特征矩阵中第m行第t列的元素,*表示复共轭算子,小波函数公式如下所示:
[0108][0109]
其中,e为自然底数;
[0110]
对z中的每一行rssi数据即z
n
进行连续小波变换,将一维信号转化成二维数据,得
到n个参考点的m
×
t的特征矩阵,上述n个参考点的m
×
t的特征矩阵将用作后续cnn模型的训练样本。同样的,使用上述基于cwt的可见光rssi特征表示方法得到目标点的m
×
t的特征矩阵,并将上述目标点的m
×
t的特征矩阵用作后续cnn模型的测试样本。
[0111]
然后使用训练好的cnn模型来准确预测每个参考点与目标点之间的匹配概率。该方法使用的cnn模型有四个隐藏层和一个全连接层。首先使用n个参考点的m
×
t的特征矩阵对cnn模型进行训练,得到训练好的cnn模型后将目标点的m
×
t的特征矩阵输入cnn模型,由cnn模型输出每个参考点与目标点之间的匹配概率。原始输入的稳定可见光rssi时频表示被同化为深度为1的灰度图像数据,cnn的输出层由softmax层组成,softmax层输出不同参考点与目标点之间的匹配概率p=[p1,p2,p3,...,p
n
],n为参考点个数,p
v
为第v个参考点与目标点之间的匹配概率,v=1,2...,n。
[0112]
三、一种基于参考点概率的改进wknn定位模型
[0113]
传统wknn算法计算目标点指纹与指纹库中每个参考点指纹的欧式距离,选取k个与目标点指纹欧式距离最近的参考点,然后根据参考点指纹与目标点指纹的欧式距离大小确定每个参考点指纹的权重大小,与目标点指纹欧式距离越小的参考点的权重越大,最后计算选取的k个参考点坐标的加权平均值来作为目标点的坐标。本发明在在线位置匹配阶段使用一种的改进的wknn模型,首先使用离线阶段获取的所有参考点的指纹信息对此wknn模型进行训练,然后根据预测出来的各个参考点与目标点之间的匹配概率,选取与目标点之间匹配概率最高的3个参考点作为wknn的3个样本点,并且根据所选取的3个样本点与目标点之间的匹配概率(p
i
,i=1,2,3)进行wknn权值的推算,得到各自的权值,由于上述基于卷积神经网络的最近邻参考点概率预测方法的准确性,根据该概率进行wknn的选点以及权值推算,能在一定程度上提高指纹匹配的准确度。
[0114]
具体地,首先使用离线阶段获取的所有参考点的混合特征指纹对wknn模型进行训练。其次在上述基于卷积神经网络的最近邻参考点概率预测方法预测的所有的参考点中选取与目标点之间概率最高的3个参考点作为wknn的样本点。然后基于上述选取的3个样本点与目标点之间的匹配概率进行wknn权值的推算,得到各自的权值,选取的3个样本点的权值计算如下所示:
[0115][0116]
其中,p
i
表示选中的第i个参考点与目标点之间的匹配概率,w
i
表示第i个参考点的权值。
[0117]
最后,将目标点的混合特征指纹、选取的3个样本点的混合特征指纹和3个样本点各自的权值输入wknn模型,得到目标的位置。
[0118]
本发明使用加权最小二乘法将可见光的rssi数据与ble的aoa数据融合,将多个指纹特征融合,增强了指纹特征的表达,一定程度上解决使用单个指纹特征定位时的精度不高问题。使用连续小波变换将稳定的一维可见光rssi数据表示成二维联合时频数据,能够为cnn预测参考点概率提供更多的鉴别信息,借助cnn处理二维数据的优势,使用cnn能够预测到更加准确的各个参考点与目标点之间的匹配概率。将上述概率用于wknn的样本点选取和权值推算,能够提高室内定位的精准度。
[0119]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。