技术特征:
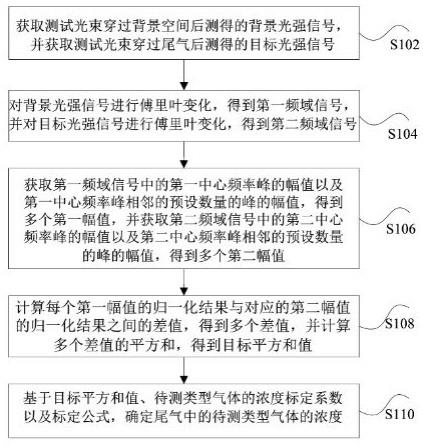
1.一种基于机动车尾气遥测系统的尾气测量方法,其特征在于,包括:获取测试光束穿过背景空间后测得的背景光强信号,并获取所述测试光束穿过尾气后测得的目标光强信号;对所述背景光强信号进行傅里叶变化,得到第一频域信号,并对所述目标光强信号进行傅里叶变化,得到第二频域信号;获取所述第一频域信号中的第一中心频率峰的幅值以及所述第一中心频率峰相邻的预设数量的峰的幅值,得到多个第一幅值,并获取所述第二频域信号中的第二中心频率峰的幅值以及所述第二中心频率峰相邻的所述预设数量的峰的幅值,得到多个第二幅值;计算每个所述第一幅值的归一化结果与对应的所述第二幅值的归一化结果之间的差值,得到多个差值,并计算所述多个差值的平方和,得到目标平方和值;基于所述目标平方和值、待测类型气体的浓度标定系数以及标定公式,确定所述尾气中的所述待测类型气体的浓度,其中,所述标定公式用于表征所述目标平方和值、所述待测类型气体的浓度标定系数以及所述待测类型气体的浓度之间的关系。2.根据权利要求1所述的方法,其特征在于,在所述获取测试光束穿过背景空间后测得的背景光强信号,并获取所述测试光束穿过尾气后测得的目标光强信号之前,所述方法还包括:调整激光器的驱动电流的扫描区间或控温区间,以使所述激光器发射的所述测试光束的波长扫描区间包含所述待测类型气体的吸收峰,其中,所述驱动电流为锯齿波扫描电流信号叠加高频正弦波信号后得到的电流信号。3.根据权利要求1所述的方法,其特征在于,所述计算每个所述第一幅值的归一化结果与对应的所述第二幅值的归一化结果之间的差值,得到多个差值包括:基于所述第一中心频率峰的幅值与所述多个第一幅值中所述第一中心频率峰的幅值以外的幅值之间的比例关系,对所述多个第一幅值进行归一化处理,得到多个归一化后的第一幅值;基于所述第二中心频率峰的幅值与所述多个第二幅值中所述第二中心频率峰的幅值以外的幅值之间的比例关系,对所述多个第二幅值进行归一化处理,得到多个归一化后的第二幅值;计算每个所述归一化后的第一幅值与对应的所述归一化后的第二幅值之间的差值,得到所述多个差值。4.根据权利要求1所述的方法,其特征在于,所述基于所述目标平方和值、待测类型气体的浓度标定系数以及标定公式,确定所述尾气中的所述待测类型气体的浓度包括:通过下式确定所述尾气中的所述待测类型气体的浓度:y=ac2 bc k其中,y为所述目标平方和值,a、b、k为所述待测类型气体的浓度标定系数,c为所述待测类型气体的浓度。5.根据权利要求1所述的方法,其特征在于,在基于所述目标平方和值、待测类型气体的浓度标定系数以及标定公式,确定所述尾气中的所述待测类型气体的浓度之前,所述方法还包括:获取所述测试光束穿过第一空间后测得的第一光强信号,并获取所述测试光束穿过第
二空间后测得的第二光强信号,其中,所述第一空间为不存在所述待测类型气体的标准气体的空间,所述第二空间为存在所述待测类型气体的标准气体的空间;对所述第一光强信号进行傅里叶变化,得到第三频域信号,并对所述第二光强信号进行傅里叶变化,得到第四频域信号;获取所述第三频域信号中的第三中心频率峰的幅值以及所述第三中心频率峰相邻的所述预设数量的峰的幅值,得到多个第三幅值,并获取所述第四频域信号中的第四中心频率峰的幅值以及所述第四中心频率峰相邻的所述预设数量的峰的幅值,得到多个第四幅值;计算每个所述第三幅值的归一化结果与对应的所述第四幅值的归一化结果之间的差值,得到多个差值,并计算所述多个差值的平方和;基于所述第二空间内的所述待测类型气体的标准气体的浓度和所述平方和,确定所述待测类型气体的浓度标定系数。6.根据权利要求5所述的方法,其特征在于,所述基于所述第二空间内的所述待测类型气体的标准气体的浓度和所述平方和,确定所述待测类型气体的浓度标定系数包括:获取多个所述待测类型气体的浓度对应的多个所述平方和,得到二维数组;基于所述二维数组确定多个坐标值,并基于所述多个坐标值拟合所述待测类型气体的浓度标定曲线,其中,所述浓度标定曲线对应的表达式为所述标定公式;基于所述浓度标定曲线确定所述待测类型气体的浓度标定系数。7.一种基于机动车尾气遥测系统的尾气测量装置,其特征在于,包括:第一获取单元,用于获取测试光束穿过背景空间后测得的背景光强信号,并获取所述测试光束穿过尾气后测得的目标光强信号;第一转换单元,用于对所述背景光强信号进行傅里叶变化,得到第一频域信号,并对所述目标光强信号进行傅里叶变化,得到第二频域信号;第二获取单元,用于获取所述第一频域信号中的第一中心频率峰的幅值以及所述第一中心频率峰相邻的预设数量的峰的幅值,得到多个第一幅值,并获取所述第二频域信号中的第二中心频率峰的幅值以及所述第二中心频率峰相邻的所述预设数量的峰的幅值,得到多个第二幅值;第一计算单元,用于计算每个所述第一幅值的归一化结果与对应的所述第二幅值的归一化结果之间的差值,得到多个差值,并计算所述多个差值的平方和,得到目标平方和值;第一确定单元,用于基于所述目标平方和值、待测类型气体的浓度标定系数以及标定公式,确定所述尾气中的所述待测类型气体的浓度,其中,所述标定公式用于表征所述目标平方和值、所述待测类型气体的浓度标定系数以及所述待测类型气体的浓度之间的关系。8.根据权利要求7所述的装置,其特征在于,所述装置还包括:调整单元,用于在所述获取测试光束穿过背景空间后测得的背景光强信号,并获取所述测试光束穿过尾气后测得的目标光强信号之前,调整激光器的驱动电流的扫描区间或控温区间,以使所述激光器发射的所述测试光束的波长扫描区间包含所述待测类型气体的吸收峰,其中,所述驱动电流为锯齿波扫描电流信号叠加高频正弦波信号后得到的电流信号。9.一种非易失性存储介质,其特征在于,所非易失性存储介质包括存储的程序,其中,所述程序运行时控制所述非易失性存储介质所在的设备执行权利要求1至6中任意一项所
述的基于机动车尾气遥测系统的尾气测量方法。10.一种电子装置,其特征在于,包含处理器和存储器,所述存储器中存储有计算机可读指令,所述处理器用于运行所述计算机可读指令,其中,所述计算机可读指令运行时执行权利要求1至6中任意一项所述的基于机动车尾气遥测系统的尾气测量方法。
技术总结
本申请公开了一种基于机动车尾气遥测系统的尾气测量方法及装置。该方法包括:获取测试光束穿过背景空间和尾气后测得的背景光强信号和目标光强信号;分别进行傅里叶变化,得到第一频域信号和第二频域信号;获取第一频域信号中心频率的峰的幅值以及相邻预设数量的峰的幅值、第二频域信号中心频率的峰的幅值以及相邻预设数量的峰的幅值,得到多个第一幅值和多个第二幅值;计算每个第一幅值的归一化结果与对应的第二幅值的归一化结果之间的差值,并计算差值的目标平方和;基于目标平方和值确定尾气中的待测类型气体的浓度。通过本申请,解决了相关技术中的尾气测量方法容易通过窗口片引入干涉干扰,且难以准确地确定尾气中的待测组分的含量的问题。待测组分的含量的问题。待测组分的含量的问题。
技术研发人员:姬红波 李自丽 郭晓鹤 王腾飞
受保护的技术使用者:华电智控(北京)技术有限公司
技术研发日:2021.11.03
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。