1.本发明涉及一种智能巡检方法及系统。
背景技术:
2.在工程项目中,特别是建筑工程项目中,经常会用到移动巡检仪针对项目中的各个内容进行巡检,如对墙柱钢筋、模板安装、梁板钢筋、混凝土结构、砌筑工程、墙面抹灰等进行巡检,而由于每个项目的大小差异,所处地理环境不同,周围的通信环境差异较大,因此需要的移动巡检仪的数量,种类都是不同的。
3.由此可见,通过移动巡检仪实现项目的巡检至少存在以下问题:
4.1.每个项目环境差异较大,统一制定巡检方案无法满足个性化需求;
5.2.由于项目差异,监控目标也不同,通常需要大量的人力去获取数据进行设置。
技术实现要素:
6.为解决现有技术中存在的问题,本发明提供了一种智能巡检方法及系统,
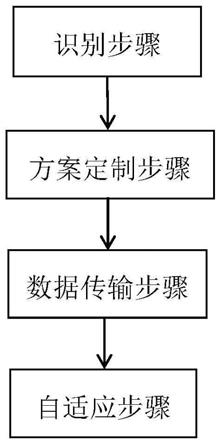
7.一种智能巡检方法,所述方法包括:
8.识别步骤,包括:确定需要巡检的区域信息,区域中的巡检目标,区域内允许的通信方式及支持所述通信方式的通信设备;
9.方案定制步骤,包括:根据所述巡检的区域信息以及区域中的巡检目标,确定巡检方案;
10.数据传输步骤,包括:根据所述巡检方案,结合所述通信设备制定组网策略,根据所述组网策略确定数据的传输方式;
11.自适应步骤,包括:针对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整。
12.一种智能巡检系统,所述系统包括:
13.识别模块,用于确定需要巡检的区域信息,区域中的巡检目标,区域内允许的通信方式及支持所述通信方式的通信设备;
14.方案定制模块,用于根据所述巡检的区域信息以及区域中的巡检目标,确定巡检方案;
15.数据传输模块,用于根据所述巡检方案,结合所述通信设备制定组网策略,根据所述组网策略确定数据的传输方式;
16.自适应模块,用于针对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整。
17.本发明的有益效果是,本发明提供的智能巡检方法及系统,通过对巡检区域内区域信息及巡检目标,通信方式及设备的识别,确定巡检方案,构建组网策略,确定数据传输方式;通过对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整,由此实现能够针对各个项目的特点个性化的制定巡检方案,数据传输策略,并
结合实际的项目进程等进行自适应调整,由此不仅提高了项目的个性化需求,也保证了数据传输的可靠性,大大降低了人力成本,提高了巡检的智能化。
附图说明
18.下面结合附图和实施例对本发明进一步说明。
19.图1是本发明的优选实施例的方法流程图;
20.图2是本发明的优选实施例的结构框图。
具体实施方式
21.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
22.如图1所示,本发明提供了一种智能巡检方法,所述方法包括:
23.识别步骤,包括:确定需要巡检的区域信息,区域中的巡检目标,区域内允许的通信方式及支持所述通信方式的通信设备;巡检网络因为工程环境的差异而导致难以进行统一的规划,无法统一的进行网络搭建,也无法对目标进行统一的定制,因此,在进行方案的定制之前,需要确定巡检区域的大小,区域内的巡检目标;而由于区域中往往覆盖有各种各样的网络,且有支持相关网络的基站保证通信的稳定性,而且,通信技术的发展,网络的覆盖面也越来越广,即使是特别偏僻、边缘的区域也会有相关的网络覆盖,因此本发明的方案不仅考虑巡检的区域信息和目标信息,还对区域内覆盖的网络信息进行获取,以实现保证后续数据传输的稳定性及可靠性。
24.方案定制步骤,包括:根据所述巡检的区域信息以及区域中的巡检目标,确定巡检方案;在现有工程中,由于具体项目的不同,往往具有不同的评价指标,因此,在方案的定制过程中,需要确定区域内的目标,以便基于各个目标制定巡检方案。
25.数据传输步骤,包括:根据所述巡检方案,结合所述通信设备制定组网策略,根据所述组网策略确定数据的传输方式;由于网络环境的复杂性,为了提高数据传输的可靠性及稳定性,需要充分考虑周围环境的特点,结合环境特点,确定覆盖的网络,利用自建网络和已有网络构建不同数据的传输方式,以满足数据传输可靠性和及时性要求。
26.自适应步骤,包括:针对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整。由于工程环境的复杂性,以及环境变化的频繁性,提前定制的方案需要具有自适应的能力。为了能够及时的获取环境的变化,可以通过对移动巡检仪的状态进行实时监控,及时的获取巡检仪和环境的变化,作出及时的调整方案。优选的,为了提高工作效率,巡检仪上除了安装有相关工程项目指标的传感器之外,还可以包括环境传感器,以实现温度、湿度、障碍物等环境信息的监控。其中,上述环境传感器采用休眠触发机制,即一般情况下,上述传感器处于休眠机制,当监测到周围环境的变化量超过特定阈值时,触发其进入环境监测状态。
27.在现有技术中,随着智能网联,传感器技术,数据建模技术的发展,可以在工程前期对各个工程进程进行全方位的模拟,因此,借助于这些现有的技术,可以预先建立工程进度模型,然后制定相关的策略。
28.优选的,所述方案定制步骤,具体包括:
29.根据所述区域信息确定区域的范围s,根据所述范围确定移动巡检仪的数量n;
30.根据所述巡检目标确定移动巡检仪的巡检对象以及异常指标a;
31.根据移动巡检仪的数量和巡检对象确定巡检方案;
32.所述巡检方案包括:每个移动巡检仪的巡检周期设置,每个移动巡检仪的巡检区域设置,以及每个移动巡检仪的数据传输权限设置。
33.现有的工程项目涉及墙柱钢筋、模板安装、梁板钢筋、混凝土结构、砌筑工程、墙面抹灰等等;其中,墙柱钢筋有涉及各类间距等方面,如主筋间距:剪力墙主筋间距分水平分布筋间距和竖向分布筋间距,取墙分布筋间距最大处记录,两面都要记录下来,共4个数据。间距允许误差≤10mm(临界值)。暗柱箍筋间距:剪力墙暗柱箍筋间距允许误差≤20mm。剪力墙钢筋保护层厚;在墙模加固好之后,用卷尺量取墙筋到模板的最大距离即为剪力墙钢筋保护层厚度,允许误差≤3mm。模板安装涉及各类位置和尺寸等,如轴线位置:对班组放出的控制线,墙梁边线进行检查,按照主控制线依次检查,并记录下来,允许误差≤5mm。底模上表面标高:在楼板模板加固好以后,根据从下面引上来的标高,通过水准仪将标高打在钢筋上,保证板四周钢筋上有标高,并用红胶带标记下来。选取两点拉通线就可以检查板的标高了,允许误差[
‑
5,5]mm。梁截面尺寸:在梁模板加固好以后,用卷尺检查每个梁截面内部尺寸,并记录下来,允许误差[
‑
5,4]mm。剪力墙垂直度:每道剪力墙取任意一面,在控制线上架设扫平仪,沿竖向离墙边30cm分别取3个点(在墙长的情况下需要在墙中间也取点),量取距离并记录下来比较,3个点差值即为垂直度,允许误差≤6mm。梁板钢筋涉及各类间距,如梁箍筋间距:在梁筋绑扎好以后,量取梁箍筋间距,其允许误差≤20mm。板筋间距:板底筋绑扎好以后,按板量取横向和纵向板底筋间距,并记录下来,等板面筋绑扎好以后,同样量取间距并记录,其允许误差≤10mm。其还有梁筋和板筋保护层厚度(允许偏差根据图纸说明确定)等等。混凝土结构则涉及各类的结构偏差,如截面尺寸偏差(混凝土结构):从地面向上300mm和1500mm各测量截面尺寸1次,选取其中与设计尺寸偏差最大的数,记录下来。合格标准[
‑
5,10]mm。表面平整度(混凝土结构):当所选墙长度小于3m时,同一面墙4个角(顶部及根部)中取左上及右下2个角。按45
°
角斜放靠尺累计测2次表面平整度(墙长度大于3m,中间水平放靠尺增加测量1次表面平整度)。跨测口部位必测。合格标准[0,8]mm。垂直度(混凝土结构):当墙长度小于3m时,同一面墙距两端头竖向阴阳角约30cm位置,分别按以下原则实测2次:一是靠尺顶端接触到上部混凝土顶板位置时测1次重直度,二是靠尺底端接触到下部地面位置时测1次垂直度(墙长度大于3m,中间位置增加测一次垂直度)。混凝土墙体洞口一侧为垂直度必须部位。合格标准10mm。顶板水平度极差(混凝土结构):使用激光扫平仪,在实测板跨内打出一条水平基准线。同一实测区距顶板天花线约50cm处位置选取4个角点,以及板跨几何中心位(若板单侧跨度较大可在中心部位墙加1个测点),分别测量混凝土顶板与水平基准线之间的5个垂直距离。以最低点为基准点,计算别外四点与最低点之间的偏差。偏差值≤15mm时实测点合格。砌筑工程以涉及多类指标,如表面平整度(砌体):当墙面长度小于3m,取正手墙,各墙面顶部和根部4个角中,取左上及右下2个角。按45
°
角斜放靠尺分别测量2次,(当墙面长度大于3m时,墙中间位置墙加1次水平测量)。墙面有门窗、过道洞口的,增加在各洞口45
°
斜交测一次。合格标准[0,5]mm。垂直度(砌体):当墙长度小于3m时,选取正手墙,同一面墙距两侧阴阳角约30cm位置,分别按以下原则实测2次:一是靠尺顶端接触到上部砌体位置时测1次垂直度,二是靠尺底端距离下部地面位置约30cm时测1次垂直
度(当墙面长度大于3m时,墙中间位置墙加1次水垂直测量)。墙体洞口一侧为垂直度必测部位。合格标准[0,8]mm。重要预制或现浇构件:(1)混凝土小型空心砌块、蒸压加气混凝土砌块等轻质墙体,当墙长大于3m时,应增设构造柱;每层墙高的中部应增设高度为120mm,与墙体同宽的混凝土腰梁,砌体无约束的端部必须增设构造柱,预留的门窗洞口应采取钢筋混凝土框加强。(2)现浇窗台梁板:宽同墙厚,首层、顶层高度≥120mm,中间层高度≥60mm,通长设置。(3)现浇构造柱:底部、顶部各预留4根钢筋,混凝土一次浇注至梁板底。(4)洞口(大于300mm)的过梁:同墙宽,入墙不少于250mm。砌筑工序:(1)无断砖、通缝、瞎缝。(2)墙顶空隙的补砌挤紧或灌缝间隔不少于15d。(3)不同基本(含各类线槽)镀锌钢丝网(规格为10mm
×
10mm
×
0.7mm)或耐碱玻纤网(需放置与两层抹灰之间,基本搭接不小于150mm;挂网前墙体高低差部分采用水泥砂浆填补)。(4)砌体墙灰缝须双面勾缝。墙面抹灰亦涉及各类角度,如平整度、垂直度等等;这些均是工程中需要监控的指标,对于其他的各类指标在此不一一赘述。
[0034]
由上述工程内容的表述可以看出各类指标均具有自己的标准规范,可以在建立模型时,提前录入,然后根据各个时间节点的项目需要定制针对相关目标的监控策略,然后进行监控预警。
[0035]
其中,所述根据所述范围确定移动巡检仪的数量n,还包括确定所述范围内的障碍物密度p(优选的,可以为障碍物的个数),根据所述s和p确定移动巡检仪的数量n;
[0036]
其中,m为巡检仪的最佳覆盖范围。一般情况下,环境中的障碍物密度都是大于1的,由此得到的巡检仪的个数能够实现对监控范围的冗余覆盖,提高监控的全面性,防止因障碍物限制导致的数据不完整。
[0037]
所述数据传输步骤包括:根据所述巡检方案建立移动巡检仪间的组网策略;
[0038]
根据所述通信设备建立移动巡检仪与通信设备间的组网策略;
[0039]
根据所述组网策略,建立巡检数据的传输策略;
[0040]
根据所述传输策略进行不同巡检数据的传输;
[0041]
其中,所述巡检数据包括标准数据,以及具有异常权重的异常数据;且标准数据与异常数据的传输策略不同,具有不同异常权重的异常数据的传输策略不同。其中,所述异常权重可以根据异常指标a进行确定,异常指标a可以为工程中各个项目的合格标准的临界值。当获取数据后,确定是标准数据还是异常数据,如果是标准数据,说明当前监控范围内一切正常,则可以利用移动组网技术,构建网络的传输路径,进行数据的定期传输;当确定所述数据为异常数据时,确定数据的异常权重,根据所述异常权重确定传输路径;其中所述传输路径包括:第一类:利用移动巡检仪确定多跳传输路径;第二类:利用移动巡检仪和通信设备确定传输路径;监控范围内的移动巡检仪是冗余布置的,因此其可以构建冗余覆盖网络,每个冗余网络均可以构建传输路径;第三类:直接利用通信设备确定传输路径;其中,对于标准数据直接使用第一类路径进行传输,对于异常数据,当异常权重指示临界值时,使用第二类路径进行冗余传输,当异常权重指示超过临界值时,使用第二类和第三类路径进行冗余传输。由此保证不同数据的时效性要求,即标准数据为正常数据,无特别的时效要求,因此使用移动巡检仪建立的移动网络进行传输即可。对于具有指示临界值的异常权重的异常数据,可以利用移动巡检仪和多个通信设备的组合构建冗余传输路径,即每个冗余
网络中的传输路径分别通过竞争机制接入到对应的通信设备,实现数据的多路径冗余传输。当异常权重指示超过临界值时,这一类异常数据是严重影响工程质量的,因此,其时效性要求较高,因此,同时利用第二类路径和第三类路径进行冗余传输,以保证数据传输的可靠性和实时性;优选的,为了进一步提高预警的效率,巡检仪在监测到异常时,进行实时现场报警,监测到异常的巡检仪通过语音方式报警,如板筋间距超过误差10mm等,具体的内容可以根据实际需求进行设置,临近巡检仪通过指示灯和或警示音进行报警,以提高工程技术人员的警示。
[0042]
优选的,所述自适应步骤包括:确定移动巡检仪的巡检对象,结合工程周期和网络状态确定移动巡检仪的任务信息,其中所述任务信息包括:巡检对象的巡检状态,以及移动巡检仪的数据传输状态;
[0043]
根据所述巡检状态对移动巡检仪的工作状态进行调整,其中,所述工作状态包括移动巡检仪的移动路径调整,运行状态调整。其中,所述状态调整包括监控对象的调整、中继传输状态的调整(是否支持数据中转传输)。
[0044]
优选的,巡检状态还包括环境信息,即通过环境传感器获取覆盖范围内环境的变化,然后结合移动巡检仪的网络分布进行状态、移动方式、移动路径的调整,以提高网络的健壮性和可靠性。
[0045]
本发明还提供了一种智能巡检系统,所述系统包括:
[0046]
识别模块,用于确定需要巡检的区域信息,区域中的巡检目标,区域内允许的通信方式及支持所述通信方式的通信设备;
[0047]
方案定制模块,用于根据所述巡检的区域信息以及区域中的巡检目标,确定巡检方案;
[0048]
数据传输模块,用于根据所述巡检方案,结合所述通信设备制定组网策略,根据所述组网策略确定数据的传输方式;
[0049]
自适应模块,用于针对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整。
[0050]
其中,所述方案定制模块,具体用于:
[0051]
根据所述区域信息确定区域的范围,根据所述范围确定移动巡检仪的数量;
[0052]
根据所述巡检目标确定移动巡检仪的巡检对象以及异常指标;
[0053]
根据移动巡检仪的数量和巡检对象确定巡检方案;
[0054]
所述巡检方案包括:每个移动巡检仪的巡检周期设置,每个移动巡检仪的巡检区域设置,以及每个移动巡检仪的数据传输权限设置。
[0055]
其中,所述数据传输模块具体用于:根据所述巡检方案建立移动巡检仪间的组网策略;
[0056]
根据所述通信设备建立移动巡检仪与通信设备间的组网策略;
[0057]
根据所述组网策略,建立巡检数据的传输策略;
[0058]
根据所述传输策略进行不同巡检数据的传输;
[0059]
其中,所述巡检数据包括标准数据,以及具有异常权重的异常数据;且标准数据与异常数据的传输策略不同,具有不同异常权重的异常数据的传输策略不同。
[0060]
其中,所述自适应模块用于:确定移动巡检仪的巡检对象,结合工程周期和网络状
态确定移动巡检仪的任务信息,其中所述任务信息包括:巡检对象的巡检状态,以及移动巡检仪的数据传输状态;
[0061]
根据所述巡检状态对移动巡检仪的工作状态进行调整,其中,所述工作状态包括移动巡检仪的移动路径调整,运行状态调整。
[0062]
本发明的有益效果是,本发明提供的智能巡检方法及系统,通过对巡检区域内区域信息及巡检目标,通信方式及设备的识别,确定巡检方案,构建组网策略,确定数据传输方式;通过对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整,由此实现能够针对各个项目的特点个性化的制定巡检方案,数据传输策略,并结合实际的项目进程等进行自适应调整,由此不仅提高了项目的个性化需求,也保证了数据传输的可靠性,大大降低了人力成本,提高了巡检的智能化。
[0063]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。