一种基于无位置传感器的永磁同步电机if开环起动切入闭环的方法
技术领域
1.本发明涉及永磁同步电动机控制技术领域,特别是指一种基于无位置传感器的永磁同步电机if开环起动切入闭环的方法。
背景技术:
2.基于无位置传感器永磁同步电机的矢量控制技术的驱动系统,在家电领域应用广泛,尤其在空调压缩机产品中的应用。
3.目前无位置传感器的算法主要有两大类:一类通过利用电机凸极效应的高频信号注入来提取转子位置信号,一类通过利用电机反电动势来观测转子速度和位置信息。
4.高频注入这类算法对硬件和软件要求较高,适用范围有限。而基于反电势这类算法,通过电机模型进行简单计算就可以满足控制要求,但是在电机起动和低速运行过程,相电压或反电势较小,基于反电势观测的算法失效。
5.考虑到空调压缩机正常运行在中高速段,不会长时间运行在低速段,因此,需要设计一种基于无位置传感器永磁同步电机的空调压缩机起动的控制策略,通过i/f(恒流频)开环加速至闭环最低转速,然后根据本文提出的切换方法,使系统平稳过渡到基于反电势无位置传感器观测的闭环运行阶段。
技术实现要素:
6.为实现上述目的,本发明采用如下技术方案,包括以下步骤:
7.s1、预定位阶段:电机定子电枢绕组中施加旋转电流矢量,使电机在电流闭环且速度开环模式下运行,定义开环电流矢量所在的同步坐标系为坐标系,以电机转子位置为基准的同步坐标系设为dq坐标系,两坐标系的相位差为θl;
8.s11:控制所述定子电流矢量的角速度保持低频旋转,且定子电流矢量的幅值以第一设定函数增至设定幅值,使转子绕组电流在电流环pi控制器调节下逐渐增加;
9.s12:控制所述定子电流矢量的幅值不变且所述指令位置角以第二设定函数增加,使转子低频匀速旋转,直至所述定子电流矢量与转子位置同步;
10.s2、i/f加速阶段:控制电机定子电流矢量以设定的角加速度旋转,使定子电流矢量与转子磁链位置通过“转矩
‑
自平衡”特性保持同步跟随,电机转子在定子电流矢量的牵引下保持同步速旋转,直至达到速度闭环运行的最低转速,使假定坐标系位置估算器准确估算出坐标系与dq坐标系的夹角θl;
11.s3、闭环切入阶段:电机转速保持速度闭环运行的最低转速不变,逐渐降低定子电流矢量幅值,根据ipmsm在静止坐标系数学模型
[0012][0013]
其中:
[0014][0015]
由公式(1)推出:
[0016][0017]
公式(1)中:rs为电机相电阻阻值;ld,lq分别为交直轴电感;
[0018]
wr电机电角速度;p为微分算子;
[0019]
iα,iβ为α
‑
β静止坐标系的电流;
[0020]
uα,uβ为α
‑
β静止坐标系的电压;
[0021]
公式(2)中:ψf为永磁体的磁链;
[0022]
s31:将静止坐标系e0x
α
、e0x
β
投影到虚拟的指令坐标系dq*下:
[0023][0024]
公式(4)中:θ*为电枢绕组中施加旋转电流矢量角度;
[0025]
s32:将e0xd、e0xq代入公式(5),推算is(n)作为切换过程电流环的参考指令,
[0026][0027]
公式(5)中:kc为调节幅度系数,范围在0到1之间;
[0028]
s33:通过判断e0xd,是否小于某一个设定阀值dltlmt,作为切入闭环的标识。
[0029]
优选的,在步骤s11中,所述第一设定函数是斜坡函数,所述定子电流矢量的幅值以所述斜坡函数增加至设定值。
[0030]
优选的,在步骤s12中,所述第二设定函数为线性函数,所述指令位置角以低频的线性函数增加。
[0031]
本发明的有益效果在于:与现有技术相比,空调压缩机起动通过i/f(恒流频)开环加速至闭环最低转速,然后根据本文提出的切换方法,使系统平稳过渡到基于反电势无位置传感器观测的闭环运行阶段,切换过程,速度以及电流基本无波动,避免了触发系统硬件过流的问题,提高了起动可靠性和平顺性。
附图说明
[0032]
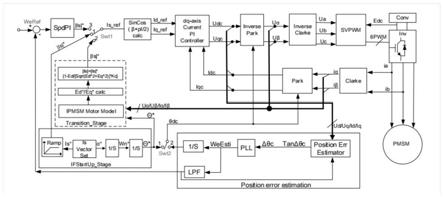
图1为本发明无位置传感器永磁同步电机起动系统的结构框图;
[0033]
图2为为预定位结束阶段的示意图;
[0034]
图3为i/f起动加速阶段坐标系示意图;
[0035]
图4为本发明提出if起动切入闭环实测的相电流波形图;
[0036]
图5实测|is|、tanδθ、以及ω波形图。
具体实施方式
[0037]
下面结合具体实施例对发明进行进一步说明。
[0038]
如图1所示出的无位置传感器永磁同步电机起动系统的结构框图,包括电流采样、
假定坐标系位置估算器、clarke和park变换、速度环、dq轴电流环、clarke逆变换和park逆变换、三相pwm逆变器、svpwm计算单元、i/fstartup单元等单元。其中,i/fstartup单元包括i/fstartup发生器、斜坡函数单元ramp等。
[0039]
本发明中永磁同步电机起动包括预定位阶段
‑
i/f加速阶段
‑
闭环切入阶段
‑
闭环阶段。
[0040]
在零低速起动时,基于反电势观测的速度估测算法不能获得精确稳定的位置和速度信号,因此在起动时只能对系统进行电流闭环,速度开环的控制。电机转速在静止至闭环最低速区间,系统采用i/f(恒流频)控制,如图1所示,开关swt1、swt2均处于1位置。线框中i/fstartup发生器用于预定位阶段和i/f开环加速阶段给定电流矢量指令值和指令位置角等运行参数。
[0041]
定位结束后,电机转子被拖动至指定位置,如图2所示。保持电流矢量幅值不变,按照指定的角加速度旋转,而电机转子在“功矩自平衡”机制下,同步跟随指令dq*坐标轴旋转,即i/f(恒流频)控制。
[0042]
当系统同步速度加速至闭环最低转速时,基于反电势观测器可以有效提取转子位置信息,可以通过假定坐标系位置估算器,估算开环下虚拟的指令dq*坐标轴系和真实dq转子坐标系之间的角度差θl,作为切换过程中电流矢量幅值调整的依据。
[0043]
当if开环运行至某一转速,系统稳定在某一个稳态时,电机功矩自平衡调整原因,θl会稳定在某一个值左右。如果直接切换,可能由于θl过大,导致系统切换前后,输出转矩变化太大,从而引起机械冲击、系统转速波动,甚至触发系统硬件过流。为了避免或降低切换过程不平顺性,在切换入闭环前,需要考虑将两坐标系的误差逐渐衰减到较小值时,再切换至假定坐标系位置估算器闭环运行状态。切换算法就是通过分析角度差θl与电流矢量幅值之间关系,推导出θl平滑又快的衰减轨迹对应电流矢量幅值最佳调整率。
[0044]
切入闭环过程时,开关swt1处于2位置,swt2保持1位置。当符合切入闭环条件时,开关swt1处于3位置,swt2处于2位置。
[0045]
下面结合框图和计算分析描述各阶段的工作原理:
[0046]
s1、预定位阶段:电机定子电枢绕组中施加旋转电流矢量,使电机在电流闭环且速度开环模式下运行,定义开环电流矢量所在的同步坐标系为坐标系,以电机转子位置为基准的同步坐标系设为dq坐标系,两坐标系的相位差为θl;
[0047]
s11:控制所述定子电流矢量的角速度保持低频旋转,且定子电流矢量的幅值以第一设定函数增至设定幅值,使转子绕组电流在电流环pi控制器调节下逐渐增加;
[0048]
s12:控制所述定子电流矢量的幅值不变且所述指令位置角以第二设定函数增加,使转子低频匀速旋转,直至所述定子电流矢量与转子位置同步;
[0049]
s2、i/f加速阶段:控制电机定子电流矢量以设定的角加速度旋转,使定子电流矢量与转子磁链位置通过“转矩
‑
自平衡”特性保持同步跟随,电机转子在定子电流矢量的牵引下保持同步速旋转,直至达到速度闭环运行的最低转速,使假定坐标系位置估算器准确估算出坐标系与dq坐标系的夹角θl;
[0050]
s3、闭环切入阶段:电机转速保持速度闭环运行的最低转速不变,逐渐降低定子电流矢量幅值,根据ipmsm在静止坐标系数学模型
[0051][0052]
其中:
[0053][0054]
由公式(1)推出:
[0055][0056]
公式(1)中:rs为电机相电阻阻值;ld,lq分别为交直轴电感;
[0057]
wr电机电角速度;p为微分算子;
[0058]
iα,iβ为α
‑
β静止坐标系的电流;
[0059]
uα,uβ为α
‑
β静止坐标系的电压;
[0060]
公式(2)中:ψf为永磁体的磁链;
[0061]
s31:将静止坐标系e0x
α
、e0x
β
投影到虚拟的指令坐标系dq*下:
[0062][0063]
公式(4)中:θ*为电枢绕组中施加旋转电流矢量角度;
[0064]
s32:将e0xd、e0xq代入公式(5),推算is(n)作为切换过程电流环的参考指令,
[0065][0066]
公式(5)中:kc为调节幅度系数,范围在0到1之间;
[0067]
s33:通过判断e0xd,是否小于某一个设定阀值dltlmt,作为切入闭环的标识。
[0068]
在步骤s11中,第一设定函数是斜坡函数,所述定子电流矢量的幅值以所述斜坡函数增加至设定值;在步骤s12中,所述第二设定函数为线性函数,所述指令位置角以低频的线性函数增加。
[0069]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
[0070]
上述虽然对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。