1.本发明属于网络通信领域,具体涉及一种面向多控制器协同应用的实时以太网确定性调度方法。
背景技术:
2.在工业控制系统中,实时应用中的任务具有时间性、可靠性等方面的要求。随着包括工业以太网在内的现场总线技术的出现,构成了网络集成式全分布控制系统,控制功能的完成依赖于构成控制系统的现场设备间的协同工作,即实时任务分布在不同的现场设备上,任务之间需要通过网络通信来完成交互。网络通信的实时性从一定程度上决定了实时任务完成的质量以及系统的稳定性。
3.现代工厂控制系统存在大规模、网络化、集成度高、各种网络总线混杂、网络层级多等特点,以dcs、plc、sis、scada为代表的控制系统也发展为大规模联合控制系统,广域通信、分域控制和统一组态监控成为基本配置。通过网络化和集中管理的方式,控制网络上还往往接入工厂中各种规模的专用控制器,例如运动控制plc、安全控制器、智能优化控制器等等,为工厂提供了多样的专业化生产控制手段。
4.在现有的产品和技术中,各类控制器已经实现了通过实时网络与自己的终端节点进行通信,解决了控制器(主设备)和终端节点间(从设备)的实时通信问题,但对于网络协同控制应用中,终端节点可能和多个控制器进行数据交换,原有总线的控制器与节点的一对多控制关系,不能实现复杂工艺下控制器间的协作控制。针对于此种场景的应用,现有方法显得无能为力。
技术实现要素:
5.针对现有技术中存在的上述不足之处,本发明要解决的技术问题是提供一种面向多控制器协同应用的实时总线确定性调度方法,主要用于多控制器协同工作的控制器和节点的实时通信。
6.本发明为实现上述目的所采用的技术方案是:一种面向多控制器协同应用的实时以太网调度方法,用于多控制器协同工作的控制器和从节点的实时通信,包括以下步骤:
7.控制器通过调度表的形式,按照调度表定期占有总线的控制权,在总线控制权占有期间,控制器分时作为主节点与具有交互关系的从节点进行实时通信。
8.被配置到控制器和从节点的调度表包括:每个控制器与从节点的对应关系、每个控制器控制总线的顺序、每个控制器控制周期的长度。
9.在所有控制器组成的协同控制单元中,某一控制器被指定作为该协同控制单元的时钟同步基准,在调度表里固定某一同步时间,完成该控制器与其余控制器的时钟同步。
10.按照调度表的配置,某一时刻,某控制器与若干从节点建立通信关系,调度表为该控制器分配的控制周期划分为系统数据时间段、周期性数据时间段和非周期性数据时间段三个时间段;
11.系统数据时间段由控制器以广播的形式在网段内发送配置管理报文;
12.周期性数据时间段由控制器发送用于实现控制功能的报文;
13.非周期性数据时间段由控制器发送和接收从节点实现设定功能的数据报文。
14.在某时刻某控制器接收到网关发送的数据请求时,
15.如果该时刻所述控制器占有总线,所述控制器暂存网关的请求数据,等到非周期性数据时间段处理网关的请求;
16.如果该时刻所述控制器没占有总线控制权,则实时响应网关的数据请求。
17.所述控制器与其他控制器之间数据交互具体如下:
18.当请求控制器占有总线时,请求控制器在非周期数据时间段与被请求控制器进行通信;
19.当请求控制器未占有总线且被请求控制器占有总线时,被请求控制器暂存网关的请求数据,等到非周期数据时间段处理网关的请求;
20.当请求控制器和被请求控制器均未占有总线时,被请求控制器实时响应网关的数据请求。
21.按照调度表定期占有总线的控制权,在总线控制权占有期间,控制器分时作为主节点与具有交互关系的从节点进行实时通信。
22.在多个控制器组成的协同控制单元中,被指定作为该协同控制单元的时钟同步基准,在调度表里固定某一同步时间,完成该控制器与其余控制器的时钟同步。
23.一种用于协同应用的节点,作为从节点分时与控制器进行数据信息交互;在某一时刻,只能与具有交互关系即通过调度表建立连接的控制器进行通信。
24.一种计算机可读介质,其特征在于,存储有用于多控制器协同应用的程序,所述程序被处理器执行以完成一种面向多控制器协同应用的实时以太网调度方法的步骤。
25.本发明是用来实现一种面向多控制器协同应用的实时总线确定性调度方法。它具有如下优点:
26.1.通过调度表实现网络通信调度,系统结构简单。本发明通过建立控制器调度表,各控制器通过调度表的时间调度,分时复用以太网总线,实现控制器和关联从节点进行实时通信。该方法只要在调度表中建立好控制器和节点对应关系,以及各控制器占有总线的周期等参数,通过调度表的调度,既可以实现控制器和节点的实时通信,结构简单。
27.2.无需特殊的硬件。本发明基于成熟的以太网总线控制方法,无需额外的硬件设备参与控制,降低了系统实现的复杂度,降低系统构建的成本,可用性和经济性好。
28.3.通用性强。随着控制器协同应用的需求不断增加,在原有以太网总线的基础上,应用上述方法,进行多控制器和节点间的实时通信改造,不需要改变硬件系统平台,通用性能强,易于实现。
附图说明
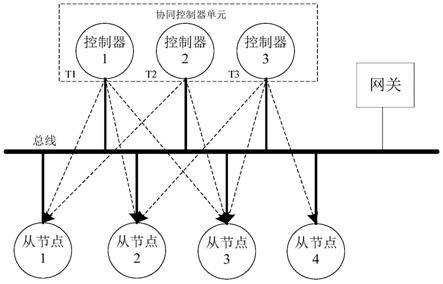
29.图1是本发明网络拓扑结构图;
30.图2是本发明调度表的设置与时间关系示意图;
31.图3是本发明基于调度表的时间划分示意图;
32.图4是本发明控制器1与节点的通信示意图;
33.图5是本发明控制器2与节点的通信示意图;
34.图6是本发明控制器3与节点的通信示意图。
具体实施方式
35.下面结合附图及实施例对本发明做进一步的详细说明。
36.本发明专利提出了一种满足多控制器协同应用的实时以太网确定性调度方法,各控制器通过调度表的方式,结合工艺流程实现对节点的定时占用,实现多控制协同应用的实时性和确定性通信。
37.本发明专利方法解决了多控制器协同应用过程中,通过公用总线,实现控制器与控制器、多控制器与节点、控制器与网关之间的通信,打破原有总线的控制器与节点的一对多控制关系,可以实现节点和控制器的多点对应关系,使控制器的协同应用变的更加灵活,具有广泛的应用前景。
38.本发明是基于以太网总线实现控制器与节点的实时通信,在原有的实时以太网控制中,单一从节点通过调度只能与某一控制器建立通信关系,该方法通过控制器分时复用的方式,能实现单一从节点与多个控制器进行实时通信。
39.一种面向多控制器协同应用的实时以太网调度方法,用于多控制器协同工作的控制器和节点的实时通信,包括以下部分:
40.所述控制器与从节点通过总线进行连接;所有控制器组成协同控制单元;
41.协同控制单元部分:协同控制单元中的控制器通过调度表的形式,按照调度表定期占有总线的控制权,在总线控制权占有期间,控制器分时作为主节点与具有交互关系的从节点进行实时通信;
42.从节点部分:从节点可以与多个主节点建立通信关系,分时与主控制器进行数据信息交互,在某一时刻,只能与通过调度表建立连接的主控制器进行通信;
43.结合生产加工工艺,建立控制器调度表,调度表的内容包括每个控制器与节点的对应关系、每个控制器控制总线的顺序、每个控制器控制周期的长度等,调度表的建立需要通过现有技术实现,并将调度表配置到网络中除网关外的所用设备(包括控制器和从节点);
44.在协同控制单元中,指定某一控制器作为该单元的时钟同步基准,在调度表里固定某一同步时间,完成该控制器与其余控制器的时钟同步;
45.按照调度表的配置,某一时刻,某控制器与若干从节点建立通信关系,调度表为该控制器分配的时间周期,划分为系统数据时间段、周期性时间段和非周期性时间段三个时间段,所述系统数据发送时间段由主控制器以广播的形式在网段内发送配置管理报文;周期性数据发送时间段控制器发送与实现控制功能密切相关的报文,如传感器反馈信息、控制命令等;所述非周期性数据发送时间段由主控制器和从节点发送实现某种特定功能的数据报文,例如时钟同步报文。
46.所述网关,通过总线与各控制器连接,当网关向某控制器发送数据请求时,如果该时刻控制器占有总线,控制器会暂存网关的请求数据,等到非周期时间处理网关的请求;如果该时控制器没占有总线控制权,那么会时刻响应网关的数据请求;
47.所述控制器之间数据交互,当请求控制器在占有现场总线时,会在非周期时间段
与被请求控制器进行通信;当请求控制器未占有现场总线时,被请求控制器占有总线时,被请求控制器会暂存网关的请求数据,等到非周期时间处理网关的请求;当请求控制器和被请求控制器均未占有总线时,被请求控制器会那么会时刻响应网关的数据请求。
48.以图1作为实施示例,t1、t2、t3为调度表分配的控制器时间,三者之间没有时间交集。在控制表构建的微观角度来看,控制器1在t1时期与从节点1/2/3建立对应关系,在该时刻与从节点1/2/3进行实时通信;控制器2在t2时期与从节点1/3建立对应关系,在该时刻与从节点2/3/4进行实时通信;控制器3在t3时期与从节点2/3/4建立对应关系,在该时刻与从节点1/3进行实时通信;针对足够长的时间分析,从宏观来看,节点1能够实现与控制器1/2进行通信,节点2能够实现与控制器1/3进行通信,节点3能够实现与控制器1/2/3进行通信,节点4能够实现与控制器3进行通信,实现一个从节点与多个控制器进行通信。
49.图2是本发明调度表的设置与时间关系示意图,由于流程控制是周期性的,根据控制器之间的协作关系,按照不同的控制顺序建立调度表循环周期,该周期内完成某个或多个控制功能;通过控制器协作关系建立调度表,调度表的内容包括每个控制器与节点的对应关系、每个控制器控制总线的顺序、每个控制器控制周期的长度等,调度表的建立需要现有技术实现;如图2所示,该控制周期的控制顺序分别是控制器1->控制器2->控制器3>控制器2->控制器3->控制器1->控制器x,按照上述顺序实现周期控制,针对每个控制器分别给出控制时间和与从节点的连接关系;根据调度表确定每个周期的时间分配关系,实现针对各个时间段控制器与节点之间的确定性通信关系。
50.图3是本发明基于调度表的时间划分示意图,结合图1的示例,系统按照控制器不同调度时间调度表划分为t1、t2、t3等时间段;t1时间段由控制器1支配,t2时间段由控制器2支配,t3时间段由控制器3支配;以控制器3为例,通过设置系统时间、周期性和非周期性时间,实现与节点、网关与其他控制器进行通信,在周期性时间实现同从节点2和从节点3进行通信,在非周期性时间实现与网关与其他控制器进行通信。
51.图4-图6为控制器不同时间段与节点的通信关系。图4为控制器1与节点的通信示意图,在t1时间段,控制器1与节点1、节点2和节点3建立实时通信关系,通过设置系统时间、周期性和非周期性时间,实现与相关节点的确定性通信。图5为控制器2与节点的通信示意图,在t2时间段,控制器2与节点1和节点3建立实时通信关系,通过设置系统时间、周期性和非周期性时间,实现与相关节点的确定性通信。图6为控制器3与节点的通信示意图,在t3时间段,控制器3与节点2、节点3和节点4建立实时通信关系,通过设置系统时间、周期性和非周期性时间,实现与相关节点的确定性通信。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。