通过调整牙齿位置而调整校准器的方法
1.本技术是基于2016年1月5日提交的专利申请号为201680005058.2(pct/ib2016/000005)、名为“通过调整牙齿位置而调整校准器的方法”的申请(进入中国国家阶段日期:2017年7月5日)的分案申请。
2.交叉引用
3.本技术要求2015年1月5日提交的美国临时申请no.62/099,965的权利,该专利申请的全部公开通过引用而并入本文。
背景技术:
4.现有的用于矫正牙齿的方法和设备在至少一些情况下可能是不理想的。虽然牙箍(brace)能够用于使牙齿移动至对齐,但是牙箍可能佩戴笨重并且可能要求专业知识以将其放置在受试者上。而且,难以实现复杂的移动,并且至少在一些情况下矫正位置可能不能理想地解决几个牙齿的复杂移动。
5.透明壳体矫正器已经成功地用于移动牙齿。例如,用户能够佩戴一系列的透明壳体矫正器。一系列的壳体中的各个壳体可以对应于治疗的阶段。例如,一系列壳体中的第四个壳体可以对应于治疗的第四阶段。虽然透明壳体矫正器能够用于成功地使牙齿重新定位,但是透明的壳体矫正器在一些情况下可能不能够提供理想的结果。例如,牙齿的复杂移动,诸如拔出的牙的填充,可能难以利用透明的壳体矫正器治疗。而且,在至少一些情况下,例如,当利用矫正器未充分移动牙齿并且用户停止治疗时,透明的壳体矫正器的佩戴者可能不能完成治疗。
6.现有的利用透明壳体矫正器对齐牙齿的方法和设备能够依赖于提供具有腔体的壳体,该腔体被成型为具有治疗阶段的最终期望的位置和朝向的牙齿轮廓。与实施例相关的工作表明,被成型为将牙齿定位在治疗阶段的最终期望位置和朝向的腔体可能提供不太理想的移动。虽然能够将附着体放置在牙齿上以与聚合物壳体矫正器一起促进牙齿的移动,但是得到的移动在一些情况下可能不太理想。例如,随着牙齿朝着目标位置移动,施加到牙齿的力可能减小。而且,牙齿的移动可能不一致,并且牙齿可能沿着一些维度比其它维度更加容易移动。例如,牙齿的移动可能沿着六个自由度发生,并且与目标移动相比,相对移动在牙齿的自由度之间可能不同。此外,牙齿的移动能够互相关联,使得第一牙齿的移动能够影响相邻牙齿的移动。
7.现有用户界面软件能够向用户提供在各个治疗阶段的目标位置处示出的牙齿。能够根据牙齿的目标位置制造聚合物壳体矫正器。虽然根据在各个治疗阶段的结束时的牙齿的目标位置而制造矫正器能够是有效的,但是与一些实施例相关的工作表明,在至少一些情况下,施加到各个牙齿的力的量可能与理想的力的量不同,并且牙齿的对应的移动可能不太理想。
8.鉴于以上,期望提供一种改进的方法和设备,用于利用聚合物壳体矫正器而使牙齿移动至目标位置。理想地,这样的方法和设备会以减小的力使牙齿更加精确地移动到目标位置。
技术实现要素:
9.本公开的实施例改进了用于移动牙齿的方法和设备。在许多实施例中,提供了诸如聚合物壳体矫正器这样的矫正器,其中,矫正器被构造为提供一个或多个作动力(activation force)以促进牙齿移动。在多个实施例中,由各个矫正器提供的作动力被布置为向多个牙齿中的每个牙齿提供在与牙齿移动的期望方向相反的方向上的力,并且对于多个牙齿中的每个牙齿,牙齿移动可以包括由牙齿的平移和转动构成的运动矢量。作动力可以包括在牙齿移动的目标方向上推动牙齿的力或者与该力相反的反作用力的一个以上。在多个实施例中,牙齿绕着阻力中心移动,并且牙齿被在牙齿移动的目标方向上的力推动,从而产生绕着阻力中心的力矩。反作用力能够产生绕着阻力中心的反力矩,使得能够利用由力矩与反力矩的差值构成的差值力矩而使牙齿移动。差值力矩能够与牙齿的沿着移动的目标方向的倾斜相关,并且能够控制牙齿移动的目标方向的倾斜,以促进移动,并且可以减小使牙齿沿着目标方向移动的力的量。
10.在许多实施例中,各个聚合物壳体矫正器包括多个接合结构,该多个接合结构被成型为接合多个附着体,以产生用于治疗阶段的多个反作用力和反力矩。聚合物壳体矫正器可以包括多个牙齿收容腔体,该牙齿收容腔体的内表面轮廓被成型为与被收容的牙齿的表面轮廓相对应,其中,多个牙齿收容腔体中的每个牙齿收容腔体都被定位和/或定向为远离对应治疗阶段被收容牙齿的对应目标位置和朝向。
11.在许多实施例中,处理器包括用户输入部和显示器,用于使用户将多个牙齿定位并且定向为各个治疗阶段的目标位置和朝向。处理器可以包括如下指令:为了提供对矫正器的作动力,使矫正器的牙齿收容腔体定位在远离各个治疗阶段的目标位置和朝向的位置处。处理器可以包括如下指令:利用包括热成型的非直接制造或者包括3d打印、立体光刻或者熔融沉积成型中的一者以上的直接制造,制造多个矫正器。
12.通过阅读说明书、权利要求和附图,本公开的其它目的和特征将变得清晰。
13.援引并入
14.以与彼此独立的公开、专利或专利申请被具体且单独指示为引用而并入本文相同的程度,将说明书中提及的所有的公开、专利和专利申请通过引用而并入本文。
附图说明
15.具体地,在所附权利要求书中提出了本发明的新颖特征。通过参考阐明了利用本发明原理的示例性实施例的以下具体描述以及附图,将获得对本公开的特征和优势效果的更好的理解,所述附图包括:
16.图1a示出根据实施例的颌、多个牙齿和对齐牙齿的聚合物壳体矫正器;
17.图1b示出根据实施例的接合牙冠与定位的附着体的矫正器的截面图;
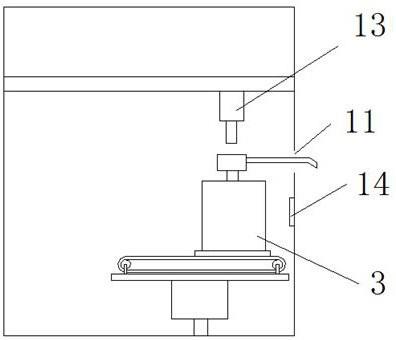
18.图2示出根据实施例的校准设备的构件以及对应的力。
19.图3a示出根据实施例的在治疗阶段完成之前的牙齿位置、在阶段完成时的目标位置以及用以完成治疗阶段的牙齿收容腔体的位置和朝向;
20.图3b示出根据实施例的聚合物壳体矫正器,其构造为在牙齿处于由牙齿的非外凸位置和朝向构成的目标位置和朝向的情况下,具有一个以上用于存储能量的作动点,其中,力朝向内凸方向,并且不足以使牙齿内凸,并且足以抑制牙齿外凸。
21.图4示出根据实施例的确定远离目标位置的矫正器的牙齿收容腔体的方法;
22.图5示出根据实施例的数据处理系统的简化方框图;
23.图6a示出根据实施例的带有外力产生机构的校准设备;
24.图6b示出根据实施例的带有外力产生机构的校准设备;以及
25.图7示出根据实施例的带有外力产生机构的校准设备。
具体实施方式
26.如本文所使用的术语“转矩”和“力矩”视为同义词。
27.如本文所使用的术语“和/或”被用作功能词以表明两个词语或者词句被一起或者单独采用。例如,a和/或b包含单独的a、单独的b以及a和b一起。
28.如本文所使用的“多个牙齿”包含两个以上的牙齿。
29.如本文所使用的“力矩”包含在到阻力中心的一定距离处作用在诸如牙齿这样的目标上的力。例如,能够利用矢量力的向量叉积来计算力矩,该矢量力被施加到距离阻力中心的位移矢量相对应的位置。力矩可以包含指向一个方向的矢量。例如,与另一个力矩相反的力矩可以包含朝向诸如牙齿这样的目标的第一侧的力矩矢量中的一个,以及朝向诸如牙齿这样的目标的相反侧的其他力矩矢量。
30.如本文所使用的“差值力矩”包含互相耦合以向一个以上的牙齿提供相反力矩的两个以上的力矩。差值力矩可以包括施加到牙齿的第一力矩和第二相反力矩。作为替代或者组合,差值力矩可以包括与齿弓的第二组一个以上牙齿的第二相反力矩耦合的第一组一个以上牙齿的第一力矩。齿弓的第一组一个以上牙齿可以包括齿弓的第一区段,并且齿弓的第二组一个以上牙齿可以包括齿弓的第二区段,其中,齿弓的第一区段的第一力矩与齿弓的第二区段的第二相反力矩耦合。第一组一个以上牙齿可以包括齿弓的第一区段的第一组多个相邻的牙齿,并且第二组一个以上牙齿可以包括齿弓的第二区段的第二组多个相邻的牙齿,其中,齿弓的第一组多个相邻的牙齿的第一力矩与齿弓的第二组多个相邻的牙齿的反力矩相反。
31.如本文所使用,包括力矩的牙齿是指具有绕着阻力中心作用在牙齿上的力的牙齿。能够利用联结到牙齿的矫正器,直接地或者与牙齿上的附着体一起或者两者组合而产生力。
32.本文所公开的反力矩能够用于精确地控制一个以上的牙齿的移动,并且能够用于提供一个以上的牙齿的锚固(anchor)。在多个实施例中,多个后牙包括反力矩,以改善后牙的锚固,并且一个以上的前牙包括较小的反力矩,并且朝向多个锚固的后牙移动。或者,多个后牙中的一个或多个后牙的反力矩能够被构造为使得一个或多个后牙能够朝向一个或多个前牙移动。
33.为了控制牙齿的移动,多个组的一个以上牙齿的力矩能够互相耦合,并且一个以上组的牙齿的力矩能够以多种方式互相耦合。为了提供一个以上组的一个以上牙齿的优选移动,一个以上牙齿的组的力矩能够以偏移力矩和/或平衡力矩互相耦合。例如,为了使前牙向后牙移动,后牙能够被提供比前牙更大的反力矩。
34.本文公开的力矩和反力矩良好地适用于移动多种类型的牙齿以及多种情况下的牙齿,并且良好适用于牙齿的很多情况。本文公开的实施例能够用以治疗以下的一个以上:
例如,咬合平面的倾斜,在嘴的一侧上使牙齿升高并且在嘴的另一侧上使牙齿降低,牙齿沿着齿弓的全体扩展(en masse expansion),拔牙部位的封堵,内凸、外凸、转动、或倾斜,或者它们的组合。
35.在许多实施例中,一个以上的后牙包括臼齿、前磨牙或者犬齿中的一者以上,并且一个以上的前牙包括中间门牙、侧门牙、尖牙、第一双尖牙或第二双尖牙中的一者以上。例如,“后牙”在本文中可以用于指代臼齿和前磨牙,并且“前牙”在本文中可以用于指代门牙或者犬齿。应当理解为“后”和“前”还可以是指一个以上牙齿的组的相对定位,例如,“后牙”可以是指相对于一个以上“前牙”设置在后面的任意牙齿,并且“前牙”可以是指相对于一个以上“后牙”设置在前面的任意牙齿。
36.本文公开的实施例能够用于将一个以上牙齿的组互相联结。一个以上牙齿的组可以包括第一组的一个以上前牙和第二组的一个以上后牙。第一组牙齿能够利用本文公开的聚合物壳体矫正器联结到第二组牙齿。
37.第一组牙齿能够以多种方式联结到第二组牙齿,并且在许多实施例中,第一组的一个以上牙齿包括第一力矩和第一反力矩,并且第二组的一个以上牙齿包括第二力矩和第二反力矩。第一力矩和第一反力矩可以包括第一组的一个以上牙齿的合并的第一力矩和合并的第一反力矩,并且第二力矩和第二反力矩可以包括第二组牙齿的合并的第二力矩和合并的第二反力矩。为了使第一组的一个以上牙齿移动、使第二组的一个以上牙齿移动或者上述两者的组合移动,合并的第一力矩、合并的第一反力矩、合并的第二力矩以及合并的第二反力矩能够与聚合物壳体矫正器互相联结。
38.在许多实施例中,第一组的一个以上牙齿分别包括第一力矩和第一反力矩,并且第二组的一个以上牙齿分别包括第二力矩和第二反力矩。能够利用在第一牙齿的第一区域或位置处的向一个以上第一牙齿的第一力产生第一力矩,并且能够利用在相反位置处的向一个第一牙齿的反力产生第一反力矩。能够利用在第二牙齿的区域处向一个以上第二牙齿的第二力产生第二力矩,并且能够利用在相反位置处的向一个第二牙齿的反力产生第二反力矩。
39.单个牙齿的阻力中心能够位于例如牙齿的齿根的双根分叉部或者三根分叉部附近。对于单个根深的牙齿,阻力中心能够位于从牙槽嵴到齿根末端的距离大约25%至大约70%之间的某处,例如,距离大约40%。
40.能够以许多方式中的一种以上确定包括多个牙齿的牙齿区段的组的阻力中心。例如,能够利用有限元建模、科技文献中的公开值、利用实验负载的台架测试、数学公式和概算和/或它们的组合,来确定阻力中心。例如,能够响应于诸如牙周韧带、软组织和骨支撑结构这样的支撑牙齿的结构确定阻力中心。虽然一组牙齿的阻力中心可能随着移动的方向而改变,但是本领域的普通技术人员能够根据本文公开的实施例确定阻力中心。
41.本文公开的实施例将良好的适用于移动第一组的一个以上牙齿中的一个以上牙齿,或者移动第二组的一个以上牙齿中的一个以上牙齿,或者上述两者的组合。
42.本文公开的实施例良好地适用于与诸如附着体和聚合物壳体矫正器这样的一种已知的市售牙齿移动构件组合。在许多实施例中,矫正器和一个以上的附着体被构造为使一个以上的牙齿沿着由六个自由度构成的牙齿移动向量而移动,在该六个自由度中,三个自由度为旋转自由度,并且三个自由度为平移自由度。本文公开的实施例能够基于针对多
个牙齿中的每个牙齿的力矩和反力矩而提供差值力矩矢量。差值力矩矢量能够提供改进的牙齿移动精度,并且可以导致使一个以上牙齿移动的力的量的减小。
43.本公开提供了一种正畸系统以及相关方法,用于设计和提供改进的或者更有效的牙齿移动系统,用以引起期望的牙齿移动和/或将牙齿重新定位至期望的排列。
44.在一个方面中,提供了一种利用矫正器移动多个牙齿的方法。该方法包括:提供被成型为放置在多个牙齿上的矫正器,所述矫正器包括多个牙齿收容腔体,该多个牙齿收容腔体被成型为收容多个牙齿中的每个牙齿,并且向多个牙齿提供差值力矩,从而移动和/或锚固牙齿,该多个牙齿包括第一组一个以上牙齿和第二组一个以上牙齿,所述第一组一个以上牙齿包括第一反力矩,并且所述第二组一个以上牙齿包括第二反力矩,所述第一反力矩与所述第二反力矩相反。
45.在许多实施例中,多个牙齿中的每个牙齿的差值力矩包括力矩和与该力矩相反的反力矩,所述力矩由绕着阻力中心的力产生,所述反力矩由绕着阻力中心的反力产生,所述反力与所述力相反,为了使牙齿移动,对于多个牙齿中的每个牙齿,所述力比所述反力大。
46.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体被成型和布置为产生总力矩,该总力矩包括多个牙齿中的每个牙齿的力矩和反力矩的总和。
47.在许多实施例中,矫正器被成型为:为了使第一组一个以上牙齿朝向第二组一个以上牙齿移动,推动第一组一个以上牙齿的第一部分与的第二组一个以上牙齿的第二部分互相远离。矫正器能够被成型为:为了使第一组一个以上牙齿和着第二组一个以上牙齿朝向彼此移动,推动第一组一个以上牙齿的第一部分与第二组一个以上牙齿的第二部分互相远离。
48.在许多实施例中,第一组一个以上牙齿包括第一组多个牙齿,并且矫正器包括利用第一组多个相邻牙齿的每个牙齿产生第一反力矩的形状,第一反力矩包括来自所述第一组多个相邻牙齿的每个牙齿的相似朝向的力矩的组合。
49.在许多实施例中,第二组一个以上牙齿包括第二组多个牙齿,并且矫正器包括利用第二组多个相邻牙齿的每个牙齿产生第二反力矩的形状,第二反力矩包括来自所述第二组多个相邻牙齿的每个牙齿的相似朝向的力矩的组合。
50.在许多实施例中,多个牙齿收容腔体被成型和布置为平衡第一组一个以上牙齿与第二组一个以上牙齿之间的差值力矩,并且平衡第一组一个以上牙齿与第二组一个以上牙齿之间的第一反力矩与第二反力矩。
51.在许多实施例中,第一组一个以上牙齿包括在前组的一个以上牙齿,并且第二组一个以上牙齿包括在后组的一个以上牙齿,其中,在前组的一个以上牙齿的第一反力矩与在后组的一个以上牙齿的第二反力矩相反。在前组的一个以上牙齿能够包括单个前牙,矫正器被成型为利用单个前牙产生第一反力矩。在后组的一个以上牙齿能够包括多个相邻的后牙,矫正器被成型为利用多个相邻的后牙产生第二反力矩。矫正器能够被成型为利用多个相邻的后牙的每个后牙产生第二反力矩,第二反力矩包括来自多个相邻的后牙的每个后牙的相似朝向的力矩的组合。为了朝向多个相邻的后牙移动在前组的一个以上牙齿,第一反力矩能够比第二反力矩小。多个相邻的后牙能够包括三个相邻的后牙,矫正器被成型为利用该三个相邻的后牙产生第二反力矩。三个相邻的后牙能够包括三个相邻的锚固的后牙,该锚固的后牙联结在一起作为牙齿的区块(block),该牙齿的区块具有与三个相邻的后
牙的每个牙齿的阻力中心远离的合并的阻力中心。
52.在许多实施例中,第一组一个以上牙齿包括在后组的一个以上牙齿,并且第二组一个以上牙齿包括在前组的一个以上牙齿,并且在前组的一个以上牙齿的第一反力矩与在前组的一个以上牙齿的第二反力矩相反。一个以上前牙的组能够包括多个相邻的前牙,并且多个相邻的牙齿收容腔体能够包括多个相邻的前牙收容腔体,该前牙收容腔体被成型为产生第一反力矩。
53.在许多实施例中,方法还包括提供联结到多个牙齿的外力或锚固产生机构,其中,所述外力或锚固产生机构被布置为向在后组的一个以上牙齿施加力和/或锚固,从而减小在后组的一个以上牙齿的移动。由外力产生机构施加到在后组的一个以上牙齿的力包括远中(distal)分力。外力或锚固产生机构能够包括ii类牵引或者iii类牵引(elastic)。
54.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体包括与牙齿的表面轮廓相对应的内表面轮廓,用以利用多个牙齿中的每个牙齿产生力矩和反力矩。
55.在许多实施例中,多个牙齿收容腔体包括:第一组一个以上腔体,该第一组一个以上腔体被成型为收容第一组一个以上牙齿;以及第二组一个以上腔体,该第二组一个以上腔体被成型为收容第二组一个以上牙齿,第一组一个以上牙齿收容腔体被成型为产生第一反力矩,并且第二组一个以上牙齿收容腔体被成型为产生第二反力矩,所述第一反力矩与所述第二反力矩相反。
56.在许多实施例中,第一组一个以上牙齿的第一反力矩足以使第一组一个以上牙齿的第一组一个以上齿根朝着第二组一个以上牙齿移动。
57.在许多实施例中,对所述多个牙齿中的每个牙齿的差值力矩包括力矩和与力矩相反的反力矩,其中,对于所述多个牙齿中的每个牙齿,在一个位置处的力产生绕着阻力中心的力矩,并且在相反位置处的反力产生绕着阻力中心的反力矩,并且其中,针对多个牙齿中的每个牙齿,力和反力的总和包括整体合力。第一组一个以上牙齿的整体合力能够朝着第二组一个以上牙齿推动第一组一个以上牙齿。对于所述多个牙齿中的每个牙齿,整体合力能够低于力和反力中的每个力,以利用减小量的力使第一组一个以上牙齿朝着第二组一个以上牙齿移动。
58.在许多实施例中,多个牙齿收容腔体中的一个以上牙齿收容腔体包括一个以上的接合结构,该接合结构被成型为收容一个以上的附着体,并且利用反力推动第一组一个以上牙齿远离第二组一个以上牙齿,以促进第一组一个以上牙齿朝向第二组一个以上牙齿的移动。被成型为收容一个以上附着体的一个以上接合结构能够产生与反力相反的力,以使第一组一个以上牙齿在目标方向上朝着第二组一个以上牙齿移动。力能够比反力大,以使一个以上目标牙齿在目标方向上移动,并且反力能够减小对一个以上目标牙齿的力的总量,并且产生第一反力矩。
59.在许多实施例中,矫正器包括多个结构,该多个结构被成型为收容多个附着体,并且推动第一牙齿远离第二牙齿,以促进第一牙齿朝向第二牙齿的移动。
60.在许多实施例中,矫正器包括聚合物壳体,聚合物壳体包括多个作动点(activation site),以利用聚合物壳体的多个偏斜存储能量,从而引导牙齿的移动。多个偏斜中的一个以上的偏斜能够利用逆着牙齿的力存储能量,当牙齿包括目标位置和朝向时,该力不足以使牙齿在与偏斜相反的方向上移动,并且额外的偏斜能够产生充足的增大
的力,以使牙齿响应于牙齿远离目标位置和朝向的移动而移动。目标位置和朝向能够包括牙齿的非外凸位置和朝向,并且力能够朝向内凸方向,并且不足以使牙齿内凸,并且足以抑制牙齿的外凸。目标位置和朝向能够包括对应于矫正器的阶段的牙齿的非内凸位置和朝向,并且力能够朝向外凸方向,并且不足以使牙齿外凸,并且足以抑制牙齿的内凸。
61.在许多实施例中,多个牙齿包括多个相邻的牙齿以及要朝向多个相邻的牙齿移动的目标牙齿,多个矫正器腔体被成型为收容多个相邻牙齿和目标牙齿中的每个牙齿,以使目标牙齿朝着多个相邻牙齿移动,其中,多个腔体被成型且布置为向多个相邻的牙齿和目标牙齿提供相反的力,从而在多个相邻牙齿之间分布力,并且抑制移动。多个相邻牙齿能够包括多个相邻的臼齿,并且目标牙齿能够包括朝着拔牙位点缩回的前牙。目标牙齿能够在矢状(sagittal)方向上移动。
62.在许多实施例中,对于与矫正器对应的治疗阶段,用户通过用户输入调整显示器上示出的牙齿的位置和朝向,其中,多个牙齿收容腔体中的每个牙齿收容腔体都包括与要被收容在腔体中的牙齿的牙齿形状轮廓相对应的腔体形状轮廓,并且其中,各个腔体形状轮廓被定位和/或朝向为远离显示器上示出的对应的牙齿形状轮廓位置和朝向,从而当矫正器置于多个牙齿上时,向矫正器提供作动能量。
63.在许多实施例中,各个腔体形状匹配被收容的牙齿的表面的至少一部分。例如,各个腔体形状能够匹配被收容的牙齿的对置的表面,以接合牙齿的每个对置表面。各个腔体形状轮廓能够包括与牙齿的所述每个对置表面接合的第一和第二对置表面,其中,所述第一和第二对置表面被成型为沿着牙齿的移动方向与牙齿接触在一起。
64.在许多实施例中,第一组一个以上牙齿和第二组一个以上牙齿朝着彼此移动,以对在第一组一个以上牙齿与第二组一个以上牙齿之间延伸的间隙提供差异化的关闭间隙。第一组一个以上牙齿能够包括多个前牙,并且第二组一个以上牙齿能够包括多个后牙,并且多个后牙能够包括与多个后牙中的每个后牙的阻力中心远离的合并的阻力中心。
65.在许多实施例中,第一反力矩对应于来自矫正器的在第一位置处绕着第一阻力中心对第一组一个以上牙齿的第一力,并且第二反力矩对应于绕着第二阻力中心对第二组一个以上牙齿的第二反力。
66.在许多实施例中,矫正器包括聚合物壳体矫正器。矫正器能够包括利用3d打印、立体光刻、或者熔融沉积成型中的一者以上直接制造的聚合物壳体矫正器。
67.在许多实施例中,多个牙齿收容腔体向多个牙齿提供差值力矩,以提高多个牙齿中的一个以上牙齿的锚固。
68.在另一个方面中,提供了一种被成型为用于放置在多个牙齿上的矫正器。所述矫正器包括:多个牙齿收容腔体,该多个牙齿收容腔体被成型为收容多个牙齿中的每个牙齿,并且向多个牙齿提供差值力矩,从而移动和/或锚固多个牙齿中的一个以上牙齿,多个牙齿收容腔体包括:第一组一个以上牙齿收容腔体,该第一组一个以上牙齿收容腔体被成型为收容第一组一个以上牙齿;以及第二组一个以上牙齿收容腔体,该第二组一个以上牙齿收容腔体被成型为收容第二组一个以上牙齿,所述第一组一个以上牙齿收容腔体被成型为向所述第一组一个以上牙齿提供第一反力矩,并且所述第二组一个以上牙齿收容腔体被成型为向所述第二组一个以上牙齿提供第二反力矩,所述第一反力矩与所述第二反力矩相反。
69.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体被成型且布置为提供
差值力矩,该差值力矩包括对被收容的牙齿的力矩和与该力矩相反的反力矩,所述力矩由绕着阻力中心的力产生,所述反力矩由绕着阻力中心的反力产生,所述反力与所述力相反,对于多个牙齿中的每个牙齿,所述力比所述反力大。
70.在许多实施例中,第一组一个以上牙齿收容腔体被成型且布置为收容一个以上前牙,并且差生第一反力矩,并且第二组一个以上牙齿收容腔体被成型且布置为收容后牙,并且产生第二反力矩,第二反力矩比第一反力矩大。
71.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体被成型和布置为产生总力矩,该总力矩包括多个牙齿中的每个牙齿的力矩和反力矩的总和。
72.在许多实施例中,第一组一个以上牙齿收容腔体包括多个相邻的牙齿收容腔体,该多个相邻的牙齿收容腔体被成型且布置为收容多个相邻的牙齿,其中,第一反力矩包括多个相邻牙齿绕着阻力中心的合并的反力矩,该阻力中心与所述多个相邻牙齿的每个牙齿的阻力中心远离。
73.在许多实施例中,第二组一个以上牙齿收容腔体包括多个相邻的牙齿收容腔体,该多个相邻的牙齿收容腔体被成型且布置为收容多个相邻的牙齿,其中,第二反力矩包括多个相邻牙齿绕着阻力中心的合并的反力矩,该阻力中心与所述多个相邻牙齿的每个牙齿的阻力中心远离。
74.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体都包括与要被收容在腔体中的牙齿的牙齿形状轮廓相对应的腔体形状轮廓,并且其中,各个腔体形状轮廓被定位/或朝向远离对应的牙齿形状轮廓位置和朝向,从而当聚合物壳体矫正器置于多个牙齿上时,向聚合物壳体矫正器提供作动能量。各个腔体形状轮廓能够包括与牙齿的所述每个对置表面接合的第一和第二对置表面,并且所述第一和第二对置表面能够被成型为沿着牙齿的移动方向与牙齿接触在一起。
75.在许多实施例中,聚合物壳体矫正器被成型为:为了使第一组一个以上牙齿朝向第二组一个以上牙齿移动,推动第一组一个以上牙齿的第一部分与第二组一个以上牙齿的第二部分互相远离。聚合物壳体矫正器能够被成型为:为了使第一组一个以上牙齿和着第二组一个以上牙齿朝向彼此移动,推动第一组一个以上牙齿的第一部分与第二组一个以上牙齿的第二部分互相远离。第一组一个以上牙齿包括第一组多个牙齿,并且聚合物壳体矫正器能够包括利用第一组多个相邻牙齿的每个牙齿产生第一反力矩的形状,第一反力矩包括来自所述第一组多个相邻牙齿的每个牙齿的相似朝向的力矩的组合。第二组一个以上牙齿包括第二组多个牙齿,并且聚合物壳体矫正器能够包括利用第二组多个相邻牙齿的每个牙齿产生第二反力矩的形状,第二反力矩包括来自所述第二组多个相邻牙齿的每个牙齿的相似朝向的力矩的组合。
76.在许多实施例中,多个牙齿收容腔体被成型和布置为平衡第一组一个以上牙齿与第二组一个以上牙齿之间的差值力矩,并且平衡第一组一个以上牙齿与第二组一个以上牙齿之间的第一反力矩与第二反力矩。第一组一个以上牙齿能够包括在前组的一个以上牙齿,并且第二组一个以上牙齿包括在后组的牙齿,其中,在前组的一个以上牙齿的第一反力矩与在后组的一个以上牙齿的第二反力矩相反。在后组的一个以上牙齿能够包括多个相邻的后牙,聚合物壳体矫正器被成型为利用多个相邻的后牙产生第二反力矩。多个相邻的后牙能够包括三个相邻的后牙,聚合物壳体矫正器被成型为利用该三个相邻的后牙产生第二
反力矩。三个相邻的后牙能够包括三个相邻的锚固的后牙,该锚固的后牙联结在一起作为牙齿的区块,该牙齿的区块具有与三个相邻的后牙的每个牙齿的阻力中心远离的合并的阻力中心。在前组的一个以上牙齿能够包括单个前牙,聚合物壳体矫正器被成型为利用单个前牙产生第一反力矩。
77.在许多实施例中,聚合物壳体矫正器被成型为利用多个相邻的后牙中的每个后牙产生第二反力矩,第二反力矩包括来自所述多个相邻的后牙的每个后牙的相似朝向的力矩的组合。第一反力矩能够比第二反力矩小,以朝着多个相邻的后牙移动在前组的一个以上牙齿。
78.在许多实施例中,第一组一个以上牙齿包括在后组的一个以上牙齿,并且第二组一个以上牙齿包括在前组的一个以上牙齿,其中,在前组的一个以上牙齿的第一反力矩与在前组的一个以上牙齿的第二反力矩相反。一个以上前牙的组能够包括多个相邻的前牙,并且多个相邻的牙齿收容腔体能够包括多个相邻的前牙收容腔体,该前牙收容腔体被成型为产生第一反力矩。
79.在许多实施例中,矫正器还包括提供联结到多个牙齿的外力或锚固产生机构,其中,所述外力或锚固产生机构被布置为向在后组的一个以上牙齿施加力和/或锚固,从而减小在后组的一个以上牙齿的移动。由外力产生机构施加到在后组的一个以上牙齿的力包括远中分力。外力或锚固产生机构能够包括ii类牵引或者iii类牵引。
80.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体包括与牙齿的表面轮廓相对应的内表面轮廓,用以利用多个牙齿中的每个牙齿产生力矩和反力矩。
81.在许多实施例中,多个牙齿收容腔体包括:第一组一个以上腔体,该第一组一个以上腔体被成型为收容第一组一个以上牙齿;以及第二组一个以上腔体,该第二组一个以上腔体被成型为收容第二组一个以上牙齿,第一组一个以上牙齿收容腔体被成型为产生第一反力矩,并且第二组一个以上牙齿收容腔体被成型为产生第二反力矩,所述第一反力矩与所述第二反力矩相反。
82.在许多实施例中,第一组一个以上牙齿的第一反力矩足以使第一组一个以上牙齿的第一组一个以上齿根朝着第二组一个以上牙齿移动。
83.在许多实施例中,对所述多个牙齿中的每个牙齿的差值力矩包括力矩和与力矩相反的反力矩,其中,对于所述多个牙齿中的每个牙齿,在一个位置处的力产生绕着阻力中心的力矩,并且在相反位置处的反力产生绕着阻力中心的反力矩,并且其中,针对多个牙齿中的每个牙齿,力和反力的总和包括整体合力。第一组一个以上牙齿的整体合力能够朝着第二组一个以上牙齿推动第一组一个以上牙齿。对于多个牙齿中的每个牙齿,整体合力能够低于力和反力中的每个力,以利用减小量的力使第一组一个以上牙齿朝向第二组一个以上牙齿移动。
84.在许多实施例中,多个牙齿收容腔体中的一个以上牙齿收容腔体包括一个以上的接合结构,该接合结构被成型为收容一个以上的附着体,并且利用反力推动第一组一个以上牙齿远离第二组一个以上牙齿,以促进第一组一个以上牙齿朝向第二组一个以上牙齿的移动。被成型为收容一个以上附着体的一个以上接合结构能够产生与反力相反的力,以使第一组一个以上牙齿在目标方向上朝着第二组一个以上牙齿移动,并且力能够比反力大,以使一个以上目标牙齿在目标方向上移动,并且反力能够减小对一个以上目标牙齿的力的
总量,并且产生第一反力矩。在许多实施例中,矫正器还包括一个以上附着体。
85.在许多实施例中,聚合物壳体矫正器包括多个接合结构,该多个接合结构被成型为收容多个附着体,并且推动第一牙齿远离第二牙齿,以促进第一牙齿朝向第二牙齿的移动。在许多实施例中,矫正器还包括多个附着体。
86.在许多实施例中,所述矫正器包括聚合物壳体,所述聚合物壳体包括多个作动点,以利用所述聚合物壳体的多个偏斜存储能量,从而引导牙齿的移动。多个偏斜中的一个以上的偏斜能够利用逆着牙齿的力存储能量,当牙齿包括与聚合物壳体的阶段相对应的目标位置和朝向时,该力不足以使牙齿在与偏斜方向相反的方向上移动,并且其中,额外的偏斜产生充足的增大的力,以使牙齿响应于牙齿远离目标位置和朝向的移动而移动。目标位置和朝向能够包括牙齿的非外凸位置和朝向,并且力能够朝向内凸方向,并且不足以使牙齿内凸,并且足以抑制牙齿的外凸。目标位置和朝向能够包括牙齿的非内凸位置和朝向,并且力能够朝向外凸方向,并且不足以使牙齿外凸,并且足以抑制牙齿的内凸。
87.在许多实施例中,多个牙齿包括多个相邻的牙齿以及要朝向多个相邻的牙齿移动的目标牙齿,多个聚合物壳体矫正器腔体被成型为收容多个相邻牙齿和目标牙齿中的每个牙齿,以使目标牙齿朝着多个相邻牙齿移动,其中,多个腔体被成型且布置为向多个相邻的牙齿和目标牙齿提供相反的力,从而在多个相邻牙齿之间分布力,并且抑制移动。多个相邻牙齿能够包括多个相邻的臼齿,并且目标牙齿能够包括朝向拔牙位点缩回的前牙。目标牙齿能够在矢状方向上移动。
88.在许多实施例中,对于与聚合物壳体矫正器对应的治疗阶段,用户通过用户输入调整显示器上示出的牙齿的位置和朝向,其中,多个牙齿收容腔体中的每个牙齿收容腔体都包括与要被收容在腔体中的牙齿的牙齿形状轮廓相对应的腔体形状轮廓,并且其中,各个腔体形状轮廓被定位和/或朝向为远离显示器上示出的对应的牙齿形状轮廓位置和朝向,从而当聚合物壳体矫正器置于多个牙齿上时,向矫正器提供作动能量。每个腔体形状轮廓能够匹配被收容的牙齿的对置的表面,以接合牙齿的每个对置的表面。各个腔体形状轮廓能够包括与牙齿的每个对置表面接合的第一和第二对置表面,并且所述第一和第二对置表面能够被成型为沿着牙齿的移动方向而与牙齿接触在一起。
89.在许多实施例中,矫正器被构造为使第一组一个以上牙齿与第二组一个以上牙齿朝着彼此移动,以对在第一组一个以上牙齿与第二组一个以上牙齿之间延伸的间隙提供差异化的关闭间隙。第一组一个以上牙齿能够包括多个前牙并且第二组一个以上牙齿能够包括后牙,并且多个后牙能够包括与多个后牙中的每个后牙的阻力中心远离的合并的阻力中心。
90.在许多实施例中,第一反力矩对应于来自矫正器的在第一位置处绕着第一阻力中心对第一组一个以上牙齿的第一力,并且第二反力矩对应于绕着第二阻力中心对第二组一个以上牙齿的第二反力。
91.在许多实施例中,矫正器包括聚合物壳体矫正器。矫正器能够包括利用3d打印、立体光刻、或者熔融沉积成型中的一者以上直接制造的聚合物壳体矫正器。
92.在许多实施例中,多个牙齿收容腔体向多个牙齿提供差值力矩,以提高多个牙齿中的一个以上牙齿的锚固。
93.在另一个方面中,提供了一种系统,该系统产生用于使受试者的多个牙齿移动的
多个矫正器。所述系统包括:输入部;显示器;以及处理器,其联结到显示器和输入部。处理器包括体现在有形媒介上的指令,以:显示在多个治疗阶段处受试者的多个牙齿,每个阶段对应于多个矫正器中的一个矫正器;将显示器上的多个牙齿中的每个牙齿调整至与用户输入响应的位置和朝向,以在多个治疗阶段的每个治疗阶段处定位牙齿;以及确定成型为用于在对应的治疗阶段放置在多个牙齿上的聚合物壳体矫正器的形状轮廓,所述聚合物壳体矫正器包括多个牙齿收容腔体,该多个牙齿收容腔体的每个牙齿收容腔体都包括与被收容的牙齿的形状轮廓相对应的形状轮廓,其中,所述多个牙齿收容腔体的每个牙齿收容腔体的形状轮廓是对于对应的治疗阶段定位或定向为远离显示器上示出的位置和朝向的一个以上的位置或朝向。
94.在许多实施例中,处理器包括响应于对多个牙齿中的一个以上牙齿的力,而在多个牙齿的一个以上牙齿上包括附着体的指令。
95.在许多实施例中,处理器包括在聚合物壳体矫正器上产生一个以上附着体接合结构的指令。
96.在许多实施例中,多个牙齿收容腔体中的每个牙齿收容腔体的形状轮廓匹配被收容的牙齿的形状轮廓。多个牙齿收容腔体中的每个牙齿收容腔体的形状轮廓能够被构造为与被收容的牙齿的对置表面接合。各个腔体形状轮廓能够包括与被收容的牙齿的所述每个对置表面接合的第一和第二对置表面,并且所述第一和第二对置表面能够被成型为沿着牙齿的移动方向与牙齿接触在一起。
97.在许多实施例中,处理器包括确定多个单独牙齿的每个牙齿的阻力中心的指令,其中,处理器包括确定一组相邻牙齿的阻力中心的指令,其中,一组相邻牙齿的阻力中心定位为与一组相邻牙齿中的每个牙齿的阻力中心远离。
98.在许多实施例中,处理器包括针对多个牙齿中的每个牙齿确定绕着阻力中心的差值力矩的指令。差值力矩能够包括:针对所述多个牙齿中的每个牙齿,响应于第一力的绕着阻力中心的第一力矩,以及响应于与第一力相反的第二力的绕着阻力中心的第二力矩。对于多个牙齿的每个牙齿,差值力矩能够关联于沿着牙齿移动方向的倾斜。
99.在许多实施例中,处理器包括产生矫正器的指令,该矫正器如本文实施例中的任意一个所述。
100.在另一个方面中,提供了一种利用聚合物壳体矫正器移动牙齿的方法。该方法包括:对第一牙齿的第一牙冠提供第一力,并且对第二牙齿的第二牙冠提供第二力,从而使第一牙齿朝向第二牙齿移动,力在第一牙齿上导致第一力矩以及在第二牙齿上导致第二力矩;以及对第一牙冠提供与第一力相反的第一反力,并且对第二牙冠提供与第二力相反的第二反力,从而抑制第一牙齿上的第一力矩以及第二牙齿上的第二力矩,第一力比第一反力大,并且第二力比第二反力大,从而移动以下的一个以上:使第一牙齿朝向第二牙齿移动,或者使第二牙齿朝向第一牙齿移动。
101.在另一个方面中,方法包括提供一种聚合物壳体矫正器。聚合物壳体矫正器被构造为:对第一牙齿的第一牙冠提供第一力,并且对第二牙齿的第二牙冠提供第二力,从而使第一牙齿朝向第二牙齿移动,力在第一牙齿上导致第一力矩以及在第二牙齿上导致第二力矩;以及对第一牙冠提供与第一力相反的第一反力,并且对第二牙冠提供与第二力相反的第二反力,从而抑制第一牙齿上的第一力矩以及第二牙齿上的第二力矩,第一力比第一反
力大,并且第二力比第二反力大,从而移动以下的一个以上:使一个以上第一牙齿朝向第二牙齿移动,或者使第二牙齿朝向第一牙齿移动。
102.在许多实施例中,聚合物壳体矫正器被构造为利用在第一牙冠与第二牙冠之间延伸的聚合物壳体将第一力联结到第一牙冠并且将第二力联结到第二牙冠,并且聚合物壳体矫正器被构造为利用接合聚合物壳体矫正器的第一牙冠上的第一附着体向第一牙冠提供一个反力,,并且利用接合聚合物壳体的第二牙冠上的第二附着体向第二牙冠提供第二反力。
103.在许多实施例中,聚合物壳体矫正器被成型为在第一位置处接合第一牙冠,以产生第一力,并且在第二位置处接合第二牙冠,以产生第二力。
104.在许多实施例中,聚合物壳体矫正器被构造为在第一位置处将第一力联结到第一牙冠,并且在第二位置处将第二力联结到第二牙冠,其中,聚合物壳体矫正器被构造为在第三位置处将第一反力联结到第一牙冠,并且在第四位置处将第二反力联结到第二牙冠,第一位置比第三位置靠近齿龈,并且第二位置比第二位置靠近齿龈。
105.在许多实施例中,聚合物壳体矫正器被构造为利用第一反力产生第一反力矩,并且利用第二反力产生第二反力矩,第一反力矩比第二反力矩小,以鼓励第一牙齿朝向第二牙齿移动。
106.在许多实施例中,第一牙齿包括前牙,并且第二牙齿包括后牙。
107.在许多实施例中,第一牙齿包括后牙,并且第二牙齿包括前牙。
108.在许多实施例中,后牙包括一个以上后牙,该一个以上后牙包括臼齿、前磨牙或者犬齿中的一者以上,并且前牙包括一个以上前牙,该一个以上前牙包括中间门牙、侧门牙、尖牙、第一双尖牙或第二双尖牙中的一者以上。
109.在许多实施例中,一个以上前牙或者一个以上后牙中的一者以上沿着齿弓全体分离地(en masse separation)一起移动。
110.在许多实施例中,方法还包括提供前述权利要求中的任意一项的矫正器。
111.在另一个方面中,提供了一种使第一牙齿朝向第二牙齿移动的方法。所述方法包括:对第一牙齿施加指向为远离第二牙齿的第一力,并且对第二牙齿施加指向为远离第一牙齿的第二力,以抑制朝向另一个牙齿推动第一牙齿或第二牙齿中的一个以上牙齿时第一和第二牙齿的转动。
112.在另一个方面中,提供了一种用于移动一个以上牙齿的矫正器。矫正器包括:多个牙齿收容腔体,其接合多个牙齿,该多个牙齿包括第一牙齿和第二牙齿,多个牙齿收容腔体包括成型为收容第一牙齿的第一腔体以及成型为收容第二牙齿的第二腔体,第一腔体与第二腔体被布置为在第一方向上推动第一牙齿并且在第二方向上推动第二牙齿;第一接合结构,其接合多个牙齿中的第一牙齿;以及第二接合结构,其接合多个牙齿中的第二牙齿;其中,第一接合结构与第二接合结构被布置为在与第一方向相反的第三方向上推动第一牙齿,并且在与第二方向相反的第四方向上推动第二牙齿。
113.在许多实施例中,第一牙齿包括第一附着体,并且第一接合结构包括第一附着体接合结构,并且第二牙齿包括第二附着体,并且第二接合结构包括第二附着体接合结构。第一接合结构、第二接合结构、第一牙齿收容腔体和第二牙齿收容腔体能够被布置为对第一牙齿提供第一反力矩,以减小第一牙齿的转动,并且提供第二反力矩,以减小第二牙齿的转
动。第一接合结构能够包括一个以上的第一附着体接合结构、第一动力脊(power ridge)、或者与第一牙齿的表面相对应的第一形状轮廓中的一者以上,并且第二接合结构能够包括第二附着体接合结构、第二动力脊、或者与第一牙齿的表面相对应的第二形状轮廓中的一者以上。
114.在许多实施例中,矫正器包括如本文提供的实施例中的任意一个的矫正器。
115.在另一个方面中,提供了一种系统,其产生用于使受试者的多个牙齿移动的多个矫正器。所述系统包括:输入部;显示器;以及处理器,其联结到显示器和输入部。处理器包括体现在有形媒介上的指令,以:显示在多个治疗阶段处受试者的多个牙齿,每个阶段对应于多个矫正器中的一个矫正器;与用户输入响应地调整显示器上的多个牙齿中的每个牙齿,以在每个治疗阶段处定位牙齿;以及确定成型为用于放置在多个牙齿上的聚合物壳体矫正器的形状轮廓,所述聚合物壳体矫正器包括多个牙齿收容腔体,该多个牙齿收容腔体被成型为收容多个牙齿中的每个牙齿,并且对多个牙齿中的每个牙齿提供差值力矩,以移动牙齿。
116.在许多实施例中,处理器包括这样的指令:确定具有多个附着体接合结构的矫正器的形状轮廓,该附着体接合结构被成型为接合多个附着体,多个附着体与多个附着体接合结构被成型且布置为互相接合,并且对所述多个牙齿中的每个牙齿提供多个差值力矩。
117.在许多实施例中,处理器包括产生矫正器的指令,该矫正器如本文实施例中的任意一个所述。
118.在许多实施例中,处理器包括利用3d打印、熔融沉积成型或者立体光刻之中的一者以上直接制造所述聚合物壳体矫正器的指令。
119.虽然参考了包括聚合物壳体矫正器的矫正器,但是本文公开的实施例良好地适用于收容牙齿的很多矫正器,例如,不具有聚合物或者壳体中的一者以上的矫正器。例如,能够利用很多材料中的一者以上来制造矫正器,该材料诸如金属、玻璃、强化纤维、碳纤维、复合物、强化复合物、铝、生物材料、以及它们的组合。例如,能够以多种方式成型矫正器,诸如利用本文所描述的热成型或者直接制造。作为替代或者组合,矫正器能够利用机械加工而制成,诸如利用计算机数字控制加工由材料块制造的矫正器。
120.本公开的正畸系统能够包括牙齿附着体以及一个以上的正畸矫正器,该正畸矫正器当被患者佩戴时与附着体接合。图1a大体上图示出了具有牙齿收容腔体的矫正器,该牙齿收容腔体收容牙齿,并且凭借例如由于矫正器的弹性而产生的力的施加而重定位牙齿。如图所示,图1a示出了一个示例性的调整聚合物壳体矫正器11,调整聚合物壳体矫正器11被患者佩戴,用以实现颌中的多个牙齿10中的每个牙齿的渐增重定位。矫正器能够包括壳体(例如,聚合物壳体),该壳体具有收容并且弹性地重定位牙齿的牙齿收容腔体。包括在invisalign(tm)系统中使用的那些矫正器的相似的矫正器被描述在属于align technology,inc.的多个专利和专利申请中,例如,美国专利no.6,450,807和no.5,975,893,以及在能够在互联网上进入的公司网站上(参见,例如网址“align.com”)。根据本公开的矫正器能够被设计为与定位在患者的牙齿上的一个以上的附着体接合,如下文进一步描述的。如本文进一步描述的,牙齿附着体能够被设计、定向和/或定位在患者的牙齿上,以在矫正器被患者佩戴时,精确地控制在患者的牙齿上产生的力矩。通过更加精确地施加对于期望移动所需的大小和方向的力矢量,本文所述的正畸治疗的订制设计和使用能够有利地
提高治疗和临床结果的有效性。包括上述矫正器和牙齿附着体的本公开的正畸系统还提供高效的力分布机构,该力分布机构能够更加有效地减少不期望的力和力矩。
121.多个牙齿10可以包括一个以上的附着体102。聚合物壳体矫正器11包括被成型为收容多个牙齿中的每个牙齿的多个牙齿收容腔体101。多个牙齿收容腔体中的每个牙齿收容腔体构包括被成型为与被收容的牙齿的外表面相对应的内表面轮廓。在许多实施例中,聚合物壳体矫正器的内表面匹配被收容的牙齿的表面的至少一部分,例如被收容的牙齿的轮廓的相对表面。聚合物壳体矫正器11可以包括一个以上的接合结构104,以接合一个以上的附着体。在许多实施例中,一个以上的接合结构被构造为:当矫正器接合一个以上的附着体时,对牙齿提供力。一个以上的接合结构104能够以多种方式被构造为向一个以上的附着体102提供预定方向上的力。例如,一个以上的接合结构可以包括这样的结构:为了将力施加到附着体和牙齿,该结构被构造为利用接合结构104的至少一些偏斜和/或扭转收容一个以上的附着体102,带有。接合结构104可以包括一个以上的突起105,例如,该突起105被构造为接合附着体。在许多实施例中,接合结构104包括被成型为收容附着体的腔体106。一个以上的突起105在腔体106内部从聚合物壳体凸出,具有接合附着体的平坦表面的形状并且在与附着体的平坦表面的大致正交的方向上施加力。
122.用于传递移动力或者一系列力的一个以上的附着体102还通过参考图1b而图示出。能够参考阻力中心103来描述牙齿移动。与图1b的附着体相似并且适于根据本文公开的实施例而并入的用于传递力的牙齿附着体装置被描述在2009年11月20日提交的美国申请序列号no.12/623,340中,该专利在2010年6月3日公开为u.s.2010/0138025,标题为“包括参量附着体的正畸系统和方法”,该专利的全部公开通过引用而并入本文。用于确定适于根据本文公开的实施例而并入的牙科校准器几何结构的方法和系统被描述在2013年4月17日提交的美国申请序列号no.13/865,091中,其公开为u.s.2013/0230818,标题为“用于优化牙科校准器几何结构的方法和系统”,其全部公开通过引用而并入本文。
123.当矫正器由患者佩戴时,附着体联结到牙冠上的牙齿表面,并且能够与图1a所示的牙科矫正器或者校准器联结或者接合。当被患者佩戴时,矫正器接合牙冠和附着体,利用例如矫正器的内部腔体的一个以上的表面或者部分的作动体(activator)与牙齿附着体和/或牙冠的对应的表面/部分之间的相互作用/接触,施加一系列的力用以引起牙齿移动。能够实现各种牙齿移动,如下文将进一步记录的。
124.如在之前的申请中所提出的,矫正器能够被设计和/或提供为一组矫正器中的一部分矫正器或者多个矫正器中的一部分矫正器,并且能够根据治疗计划而执行治疗。在这样的实施例中,各个矫正器可以被构造为使得一个以上的牙齿收容腔体具有与矫正器所期望的中间或最终牙齿排列相对应的几何结构。能够进一步设计或者修改矫正器几何机构(例如,修改为容纳牙齿附着体或者与牙齿附着体协同作用),从而将期望的力或者一系列的力施加到患者的牙齿,并且引起期望的牙齿移动,并且逐渐使牙齿重定位至期望的排列。通过将一系列渐增的位置调整矫正器放置在患者的牙齿上,患者的牙齿渐进地从它们的初始牙齿排列朝着最终牙齿排列而重定位。能够在同一阶段生产所有的调整矫正器,或者成组地或者成批地生产调整矫正器,例如,在一个治疗阶段的开始,并且患者佩戴各个矫正器,直至各个矫正器对牙齿的压力不再被感受到。能够在患者佩戴多个矫正器中的任意矫正器之前,设计并且甚至制造多个不同的矫正器(例如,一组)。此时,患者将当前的调整矫
正器替换为系列中的下一个调整矫正器,直至再也没有矫正器剩余。矫正器通常不固定至牙齿,并且患者可以在过程期间随时放置和替换矫正器。系列中的最后的一个或几个矫正器具有被选择为过度矫正牙齿排列的几何结构,即,具有会使(如果完全实现)个别牙齿移动至超过已经被选择为“最终牙齿排列”的牙齿排列的几何结构。为了补偿在已经结束重定位方法之后潜在的回复原状,例如,以允许个别牙齿朝着返回它们预先矫正的位置移动,这样的过度矫正可以是期望的。过度矫正还可以有益于矫正的速率,例如,通过使得矫正器具有被定位为超过期望的中间位置或最终位置的几何结构,个别牙齿将以更快的速率朝着该位置偏移。在这样的情况下,在牙齿到达由矫正器限定的位置之前,能够终止矫正器的使用。
125.诸如图1a所示的矫正器这样的正畸矫正器,在矫正器的牙齿收容腔体与被收容的牙齿和/或附着体之间的接触的各个点处,将力施加至牙齿的牙冠和/或定位在牙齿上的附着体。这些力的每个力的大小和它们在牙齿表面上的分布决定了导致的正畸牙齿移动的类型。牙齿移动的类型传统地概括为外凸、内凸、转动、倾斜、平移和齿根移动。牙冠移动比齿根移动大的牙齿移动被称为倾斜。牙冠和齿根等同的移动被称为平移。齿根比牙冠移动大的移动被称为齿根移动。牙齿移动可以在空间的任意平面中的任意方向上,并且可以包括沿着一个以上的轴的一个以上的转动和平移。
126.在许多实施例中,本文的矫正器被用于重定位患者的一个以上的牙齿,用以治疗正畸情况并且/或者实现期望的牙齿排列。例如,如上所述的正畸矫正器能够用于重定位牙齿,用以减小牙齿之间的空间的尺寸,也被称为“关闭间隙(space closure)”。由于一个以上的牙齿的拔出,例如第一双尖牙拔出或者第二双尖牙拔出,可以导致在患者的齿弓中存在间隙。可以通过重定位拔出点附近的一个以上牙齿而进行关闭间隙,例如,通过在向后的方向上移动在拔出点前方的一个以上牙齿,通过在向前的方向上移动在拔出点之后的一个以上牙齿,或者上述的组合。在许多实施例中,关闭间隙涉及在将后牙维持在其当前位置的同时,使一个以上前牙朝向间隙移动。或者,关闭间隙能够涉及在将前牙维持在其当前位置的同时,使一个以上后牙朝向间隙移动。可选择地,为了关闭间隙,一个以上前牙和一个以上后牙朝着彼此移动。在这样的实施例中,前牙可以在后牙移动之前、与后牙移动同时或者在后牙移动之后移动,并且前牙移动经过的距离能够比后牙移动经过的距离大、小或者与其相等。
127.图2示出了校准设备100的构件和对应的力。校准设备100可以包括被构造和布置为如上所述地提供牙齿移动力的一个以上的附着体和聚合物壳体矫正器。多个牙齿10的每个牙齿都包括:齿根12和牙冠14,并且聚合物矫正器(为了清楚而省略)能够将力施加到牙冠和/或者牙冠上的附着体,以使各个牙齿移动。多个牙齿中的每个牙齿能够相对于阻力中心移动。
128.多个牙齿10可以包括口中的任意牙齿中的两个以上牙齿。多个牙齿10可以包括多个后牙20的一个以上,诸如多个臼齿或者双尖牙以及它们的组合。例如,多个后牙20可以包括双尖牙26、第一臼齿24或者第二臼齿22中的一者以上。多个后牙可以包括例如包含智齿的第三臼齿。作为替代或者组合,多个牙齿10可以包括多个前牙30的一个以上。例如,多个前牙可以包括一个以上的双尖牙、尖牙(犬齿)或者门牙。在许多实施例中,多个前牙30包括尖牙32(犬齿)和一个以上相邻的门牙,诸如门牙34和门牙36。
129.在许多实施例中,多个附着体中的每个附着体(例如,附着体110、112、114和130以及140)包括平坦表面,以与校准器(未示出)的对应的各个接合结构接合。校准器的接合结构可以包括突起,该突起与平坦表面接合,用以从聚合物壳体矫正器向附着体和带有附着体的牙齿施加力。例如,接合结构的突起能够以各种方式构造,并且可以包括在矫正器的附着体收容腔体的内表面上的突起,或者与平坦表面接合的球状结构。在许多实施例中,矫正器的附着体接合结构与附着体接合,从而在与附着体的平坦表面大致正交的方向上施加力。
130.本文公开的许多实施例特别良好地适用于关闭拔牙位点,诸如在后牙29与前牙30之间的拔牙位点。在许多实施例中,移动一个以上的牙齿,以利用目标方向105上的移动而填充拔牙位点。虽然目标方向105能够在任意方向上延伸,但是在许多实施例中,目标方向105沿着矢状方向(例如,沿着近远中(mesial
‑
distal)方向)延伸。为了利用适当量的力使一个以上的牙齿直接移动,能够根据矫正器、矫正器的接合结构和/或附着体的尺寸和形状,控制牙齿的倾斜和/或相反转动的量。
131.在许多实施例中,当为了进行关闭间隙或者其它正畸治疗而移动牙齿时,期望使牙齿齿根与齿冠同时移动,使得牙齿沿着目标方向平移,而几乎不或者不倾斜,还称为牙齿的“整体移动”。例如,当为了进行关闭间隙而重定位一个以上的前牙时,可以期望的是缩回前牙,而不使牙冠朝着舌头倾斜,从而避免牙齿的倾斜的损失和/或牙齿的上下高度的改变。
132.当矫正器将力主要施加到齿冠和/或当齿冠上的力的量超过一定阈值时,可以产生牙齿的倾斜。在许多实施例中,各个牙齿包括对施加到牙齿的力的阻力中心,并且牙齿可绕着阻力中心转动,或者大致绕着阻力中心三维转动。牙齿的阻力中心可以定位于远离齿冠,使得施加到齿冠上的力导致绕着阻力中心的对牙齿的力矩,该力矩引起牙齿转动。
133.例如,再次参考图2的实施例,第一臼齿24可以包括位于齿根的三根分叉部附近的阻力中心25。第二臼齿22可以包括位于齿根的三根分叉部附近的阻力中心23。例如,双尖牙26可以包括阻力中心27。尖牙32可以包括阻力中心33。门牙34和门牙36可以分别包括一个阻力中心。如此处所述的多个牙齿的阻力中心的每个阻力中心的位置可以对应于本领域的普通技术人员已知的阻力中心。
134.为了使牙齿移动而向牙齿的力的施加能够导致绕着阻力中心的对牙齿的力矩。在许多实施例中,诸如尖牙32这样的要移动的目标牙齿受到来自聚合物壳体矫正器的力,该力能够是来自壳体的内部表面的直接力,或者经过附着体的非直接力,或者这两者的组合。例如,为了引导牙齿32进行计划的移动,附着体140能够可选择地放置在牙齿32上。附着体140与聚合物壳体矫正器11的接合(例如,经由位于聚合物壳体矫正器11上的接合结构)能够导致到附着体140和牙齿的力矢量,如箭头141所示。随着牙齿32以阻力中心33抵抗这些力,能够产生绕着阻力中心的力矩146。力矩146能够导致牙齿32转动,例如,倾斜。
135.在许多实施例中,本文的矫正器被成型为调整施加到牙齿的力系统,从而引起平移牙齿移动,而几乎没有或者没有倾斜移动。例如,本文的矫正器能够被成型为减小施加到牙冠的力的量,例如,减小至从大约0.5n至大约3n的范围内。能够通过调整牙齿收容腔体的形状、利用附着体和附着体接合结构、利用诸如牵引这样的外力产生机构、或者它们的组合,来实现力系统的调整,如前文和此处所论述的。
136.作为替代或者组合,本文的矫正器能够被成型为调整牙齿上的能量分布,从而引起平移的牙齿移动,而几乎没有或者没有倾斜移动。例如,本文的矫正器能够被成型为将能量分布到齿根上以及齿冠上。能够通过调整牙齿收容腔体的形状、利用附着体和附着体接合结构、利用诸如牵引这样的外力产生机构、或者它们的组合,来实现能量分布的调整,如前文和此处所论述的。
137.各种方法能够用于改变牙齿上的力系统和/或能量分布,从而引起牙齿的整体移动。例如,在许多实施例中,本文的矫正器被成型为将反力矩施加到牙齿上,该反力矩与否则会产生牙齿转动的力矩相反,使得利用力矩与反力矩之间的差值力矩来提供牙齿的移动。能够通过调整牙齿收容腔体的位置和/或朝向相对于对应的被收容的牙齿的位置和/或朝向产生反力矩,使得当矫正器被患者佩戴时,牙齿收容腔体将反力矩施加到牙齿上。作为替代或者组合,在许多实施例中,牙齿上的附着体被设置为产生反力矩,使得利用力矩与反力矩之间的差值力矩提供牙齿的移动。能够通过在矫正器被佩戴时附着体与位于矫正器上的接合结构之间的相互作用产生反力矩。在许多实施例中,设置以产生反力矩的附着体定位于比附着体或者牙冠表面的接合位点更远离阻力中心,该接合位点在目标方向上推动目标牙齿,使得在目标方向上的力矢量比在相反方向上的反力矩大,从而产生差值力矩,并且在目标方向上推动目标牙齿。
138.再次参考图2的示例性实施例,能够利用附着体130或者牙齿与聚合物壳体矫正器11的直接接合或者这两者的组合提供反力矩136,其产生如箭头131所示的力矢量,与箭头141所示的附着体140的力矢量相反。在许多实施例中,在目标方向105上推动牙齿32的附着体140被定位为比相反的附着体130更靠近阻力中心33和齿龈,使得反力矩136能够近似于力矩146,从而随着牙齿沿着目标方向105移动而控制牙齿32的转动。例如,反力矩136能够比力矩146小,以使得牙齿能够在目标方向105上伴随转动地倾斜,反力矩136能够比力矩146大,以使得牙冠远离目标方向195转动,或者反力矩136能够与力矩146相似,从而当牙齿沿着目标方向105移动时维持牙齿32的朝向。在许多实施例中,包括聚合物壳体的矫正器11包括接合附着体的接合结构,并且接合结构的位置和形状能够被布置为提供适当量的反力,从而提供反力矩以沿着目标路径引导牙齿移动。
139.在许多实施例中,最后方的牙齿包括适于与聚合物矫正器接合的基本暴露的表面16。聚合物壳体矫正器11能够在接合位点处产生沿着牙冠的后表面的力,如箭头122所示。例如,箭头122所示的指向前的力产生绕着第二臼齿22的阻力中心23的力矩126。在许多实施例中,箭头122所示的矫正器的力产生例如绕着第一臼齿24的阻力中心25的力矩127,以及绕着双尖牙26的阻力中心27的力矩128。多个后牙中的一个以上后牙可以具有置于其上的附着体,以产生反力矩。
140.附着体110能够产生与箭头122所示的力相反的如箭头111所示的反力,从而产生反力矩116。反力矩116能够比力矩126大,使得例如利用由力矩126和反力矩116的总和得到的差值力矩,使第二臼齿22的牙冠远离第一臼齿24转动。或者,反力矩116能够比力矩126小,并且还抑制第二臼齿22朝着第一臼齿24转动。
141.能够基于施加到牙齿的力的量以及沿着牙齿的长轴从阻力中心到力的位置的距离,确定各个牙齿的力矩和反力矩。箭头122所示的力被施加在沿着牙齿的长轴距离阻力中心23的距离160处。箭头111所示的反力被施加在距离阻力中心23的距离162处。在许多实施
例中,力矩126大致等于距离160与由箭头122表示的力的乘积。反力矩112大致等于距离162与箭头111所示的附着体110上的反力的乘积。本领域的普通技术人员应当理解很多方式以确定此处所述的力矩,例如,利用有限元建模,沿着牙齿对相对于阻力中心的多个位置处的力矩进行积分。
142.附着体112能够产生与箭头122所示的力相反的由箭头113所示的反力,从而产生反力矩117。反力矩117能够比力矩127大,使得例如利用由力矩127与反力矩117的总和得到的差值力矩,使第一臼齿24的牙冠远离双尖牙26转动。或者,反力矩117能够比力矩127小,并且还抑制第一臼齿24朝向双尖牙26转动。
143.附着体114能够产生与箭头122所示的力相反的由箭头115所示的反力,从而产生反力矩118。反力矩118能够比力矩128大,使得例如利用由力矩128与反力矩118的总和得到的差值力矩,使双尖牙26的牙冠远离包含尖牙32的目标牙齿转动。或者,反力矩118能够比力矩128小,并且还抑制双尖牙26朝向包含尖牙32的目标牙齿转动。
144.在许多实施例中,定义了施加到牙齿的总力矩的大小与沿着目标移动方向而施加到牙齿的力的量之间的比率,在本文被称为“力矩
‑
力比率”。例如,在图2的实施例中,牙齿32的力矩
‑
力比率被定义为力矩146和反力矩136的总和与力141之间的比率。力矩
‑
力比率的值可以确定所得的牙齿移动,例如牙齿是否平移、转动、或两者均有。在许多实施例中,要施加到牙齿的适当的力矩
‑
力比率基于特定牙齿的特性而变化,例如,牙齿尺寸、齿根结构的复杂性和/或阻力中心的位置,使得在减少转动的同时产生平移。例如,对于后牙,产生平移而几乎没有或者没有转动的力矩
‑
力比率能够处于从大约4mm至大约10mm的范围内。作为另一个实例,对于前牙,产生平移而几乎没有或者没有转动的力矩
‑
力比率能够处于从大约6mm至大约15mm的范围内。
145.在许多实施例中,期望在将第二组的一个以上牙齿(“锚固牙齿”)维持在它们的当前排列的同时,使第一组的一个以上牙齿移动。例如,可以通过在锚固一个以上的后牙的同时使一个以上的前牙缩回,或者通过在锚固一个以上的前牙的同时使一个以上的后牙向前,而进行关闭间隙。在图2的实施例中,为了控制一个以上的牙齿的朝向,能够利用差值力矩配置多个后牙20中的一个以上。在许多实施例中,后牙的反力矩被布置为抑制后牙的移动。与实施例相关的工操表明,远离移动相邻牙齿的力地转动牙齿的牙冠能够抑制牙齿的移动,并且朝向来自相邻牙齿的力的牙齿的牙冠的转动能够促进牙齿朝着相邻牙齿移动。在许多实施例中,多个后牙20包括相邻牙齿的区块,其被构造为锚固矫正器并且使目标牙齿移动,而多个相邻的锚固牙齿几乎不移动或者不移动。作为替代或者组合,例如,多个后牙20中的一个以上后牙能够被构造为朝向目标牙齿移动。虽然以在锚固后牙的同时重定位前牙的情形描述了此处的特定实施例,但是应当理解为本公开能够同等地应用于在锚固前牙的同时重定位后牙。
146.本公开的系统、方法和装置能够用于将差值力矩施加到患者的牙齿,以减小或者抑制一个以上的锚固牙齿的移动,本文中也称为“增强锚固”。在许多实施例中,正畸矫正器被成型为将力矩施加到要移动的第一组的一个以上牙齿(例如,以关闭间隙),并且将反力矩施加到第二组的一个以上锚固牙齿,从而产生第一组牙齿与第二组牙齿之间的差值力矩。能够通过调整一个以上牙齿收容腔体的形状、利用附着体和附着体接合结构、利用诸如牵引这样的外力产生机构、或者它们的组合,来产生差值力矩,如前文和此处所论述的。
147.在许多实施例中,为了对牙齿移动提供改进的控制,在本文所述的牙齿的组之间提供差值力矩。在许多实施例中,第一组牙齿包括第一力矩,并且第二组牙齿包括第二力矩,并且第一组牙齿的第一力矩与第二组牙齿的第二力矩之间的差值力矩使得例如前牙和/或后牙的牙齿能够选择性地移动。例如,在许多实施例中,在一组一个以上的后牙与一组一个以上的前牙之间提供大的差值力矩,从而锚固后牙。后牙的反力矩能够比前牙的力矩大,从而锚固后牙,例如,向后牙提供最大锚固。在替代实施例中,在一组一个以上的后牙与一组一个以上的前牙之间提供大的差值力矩,从而锚固前牙。前牙的反力矩能够比后牙的力矩大,从而锚固前牙,例如,向前牙提供最大锚固。
148.在许多实施例中,多个牙齿联结在一起,使得它们能够作为单个单元而共同地动作,例如,从而增大牙齿的锚固。以这种方式联结在一起的牙齿可以呈现对重定位的较大的阻力。相比于其他类型的矫正器(例如,线和支架矫正器),本文描述的壳体矫正器由于增大了矫正器表面与被收容的牙齿的表面(例如,咬合表面、舌侧表面和/或颊侧表面)之间的接触程度,可以提供用于创建锚固的更大的能力。聚合物壳体矫正器能够被构造为以多种方式将多组的一个以上牙齿相互联结。例如,第一组的一个以上牙齿能够联结到第二组的一个以上牙齿。在许多实施例中,例如,参考图2,第一组的一个以上牙齿包括第一组多个牙齿,并且聚合物壳体矫正器包括利用第一组多个相邻牙齿中的每个牙齿产生第一反力矩的形状,其中,第一反力矩包括来自所述第一组多个相邻牙齿中的每个牙齿的相似朝向的力矩的组合,如本文示出和描述的。第二组的一个以上牙齿可以包括第二组多个牙齿,并且聚合物壳体矫正器可以具有利用第二组多个相邻牙齿中的每个牙齿产生第二反力矩的形状,其中,第二反力矩包括来自所述第二组多个相邻牙齿中的每个牙齿的相似朝向的力矩的组合。
149.在许多实施例中,包括力矩的牙齿包括带有从矫正器施加的力以产生绕着阻力中心的力矩或反力矩的牙齿。包括力矩或者反力矩的一组牙齿可以包括与一个以上牙齿接合以提供绕着阻力中心的力矩或者反力矩的矫正器。
150.在许多实施例中,多个牙齿收容腔体被成型和布置为利用在第一组一个以上牙齿与第二组一个以上牙齿之间延伸的聚合物矫正器平衡第一组一个以上牙齿与第二组一个以上牙齿之间的差值力矩。作为替代或者组合,多个牙齿收容腔体能够被成型且布置为平衡第一组一个以上牙齿与第二组一个以上牙齿之间的第一反力矩与第二反力矩。
151.在许多实施例中,利用一组一个以上牙齿,例如利用多个后牙,提供反力矩。反力矩可以包括该组牙齿中的各个牙齿的反力矩的总和。合并的反力矩可以包括绕着合并的阻力中心的反力矩,该合并的阻力中心远离该组中的每个牙齿的阻力中心。本领域的普通技术人员能够利用一种以上已知的方式并且根据本文公开的实施例确定一组牙齿的阻力中心。
152.再次参考图2的实施例,在许多实施例中,力矩136与力矩116、力矩117和力矩118相反,例如,力矩116、117和118如示出地相似朝向。利用右手三坐标系,力矩136将朝向多个牙齿的一侧(从纸面向外朝向观看者),并且力矩116、力矩117和力矩118将相似地朝向与力矩136相反的牙齿一侧(从纸面向内远离观看者)。例如,力矩136能够朝向一组牙齿的颊侧,并且力矩116、力矩117和力矩118能够相似地朝向一组牙齿的舌侧。力矩116、力矩117和力矩118的总和能够被视作在后牙20上的反力矩,该反力矩与在一个以上的前牙20上的力矩
136相反。在许多实施例中,在后牙20上的反力矩增大了后牙20的锚固,与此同时,在前牙20上的力矩136诱导前牙的移动。
153.虽然已经将多个后牙参考为具有反力矩的锚固区块,但是在许多实施例中,多个后牙能够被构造为不带有反转动和反力矩并且不带有附着体的锚固区块,用以利用联结到多个后牙和一个以上的目标牙齿的聚合物壳体而使一个以上的目标牙齿移动。
154.在许多实施例中,一个以上的牙齿沿着目标矢量的移动能够导致一个以上相邻牙齿的移动。例如,如图2所描绘的,尖牙32朝着拔牙位点的移动能够导致一个以上相邻的门牙外凸,例如门牙34和门牙36。在许多实施例中,聚合物壳体矫正器11被构造为向一个以上牙齿提供一个以上的作动力。聚合物壳体矫正器11能够被构造为利用聚合物壳体的作动对门牙34施加作动力150。在许多实施例中,作动力150不足以使处于目标位置的门牙34内凸,并且作动力150足以抑制门牙34外凸。随着尖牙32的移动的门牙34的外凸能够导致矫正器11的增大的偏斜以及增大的作动力150,从而抑制门牙34进一步外凸。相似地,聚合物壳体矫正器能够被构造为将作动力152施加到门牙36,并且作动力152可能不足以在抑制门牙36的外凸的同时使门牙36内凸。另外,如上文和此处所论述的,聚合物壳体矫正器能够被构造为将反力矩154(例如,舌齿根力矩)施加到门牙32、34和36,以在使门牙后缩的同时防止倾斜。
155.可选择地,本文的矫正器能够包括一个以上的外力产生机构。外力产生机构能够是能够联结到牙齿以将力施加到牙齿上的任意装置,诸如牵引(例如,i类牵引、ii类牵引、iii类牵引)、弹簧、线等。外力产生机构能够与佩戴在牙齿上的正畸矫正器分离。外力产生机构能够直接联结到一个以上牙齿(例如,经由结合或者粘合剂),或者可以间接联结到一个以上牙齿(例如,经由安装在牙齿表面上的附着体或者扣状物、位于校准器上的钩或者其它紧固特征、植入上颌或者下颌的骨头中的临时锚固装置(tad)、或者它们的组合)。在外力产生机构联结到安装在牙齿上的附着体或者扣状物的实施例中,壳体矫正器能够包括容纳该附着体或者扣状物的孔或者切口。在许多实施例中,外力产生机构包括:第一端,其直接或者间接联结到患者的上颌中的牙齿;第二端,其直接或者间接联结到患者的下颌中的牙齿。或者,外力产生机构的端部能够直接或者间接地联结到相同颌(例如,上颌或者下颌)上的不同牙齿。
156.外力产生机构能够用于完善力、力矩和/或反力矩在牙齿上的传递,以提供对牙齿的移动或者锚固的改善的控制。在许多实施例中,外力产生机构联结到一个以上牙齿,以提高一个以上锚固牙齿的锚固。例如,外力产生机构能够沿着减小或者抑制一组锚固牙齿的移动的方向,将力施加到一组一个以上的锚固牙齿,还称为“候补锚固”。外力产生机构在本文中能够被称为“外锚固产生机构”。作为替代或者组合,外力产生机构能够联结到一个以上牙齿,从而增大一个以上牙齿的移动,例如,用以关闭间隙。
157.图6a示出了包括外力产生机构602的校准设备600。校准设备600包括佩戴在多个上牙604上的壳体矫正器(为了清楚而省略)。可选择地,校准设备600包括多个附着体606,该多个附着体606装接到上牙604,并且被布置为与壳体矫正器互相作用,从而将力施加到牙齿604上。在许多实施例中,牙齿604包括一组一个以上前牙608和一组一个以上后牙610,并且校准设备在前牙608上产生一个以上力矩612,并且在后牙610上产生一个以上反力矩614。力矩612和反力矩614能够在维持如上文和此处所述的后牙610的锚固的同时,引起前
牙608的缩回,例如,以关闭前牙608与后牙610之间的间隙。
158.在图示的实施例中,外力产生机构602是ii类牵引,其具有联结到一个以上上牙604(例如,上犬齿)的第一端616,以及联结到一个以上下牙620(例如,下臼齿)的第二端618。第一端616能够直接或者间接地(例如,经由安装在牙齿上的附着体或者壳体矫正器)联结到上牙604的牙冠。第二端618能够直接或者间接地(例如,经由安装在牙齿上的附着体或者佩戴在下牙620上的壳体矫正器)而联结到下牙620的牙冠。第一端616能够被定位在相对于第二端618的前侧,从而在外力产生机构602内产生张力,该张力在向后方向上拉动上齿弓。该张力能够被视作由施加在上齿弓上的远中分力622和外凸分力624构成。应当理解,张力还能够被视作由施加在下齿弓上的近中(mesial)分力和外凸分力(未示出)构成。在许多实施例中,远中分力622传递到上齿弓的后牙610,从而增强锚固,并且维持它们在上齿弓内的位置(例如,抑制向前移动)。可选择地,远中分力622传递到上齿弓的前牙608,从而增强向后移动,例如,用以关闭间隙。
159.图6b图示了包括外力产生机构652的校准设备650。校准设备650包括佩戴在多个下牙654上的壳体矫正器(为了清除而省略)。可选择地,校准设备650包括多个附着体656,该多个附着体656装接到下牙654,并且被布置为与壳体矫正器互相作用,从而将力施加到牙齿654上。在许多实施例中,牙齿654包括一组一个以上前牙658和一组一个以上后牙660,并且校准设备在前牙658上产生一个以上力矩662,并且在后牙660上产生一个以上反力矩664。力矩662和反力矩664能够在维持如上文和此处所述的后牙660的锚固的同时,引起前牙658的缩回,例如,以关闭前牙658与后牙660之间的间隙。
160.在图示的实施例中,外力产生机构652是iii类牵引,其具有联结到一个以上下牙654(例如,下犬齿)的第一端666,以及联结到一个以上上牙670(例如,上臼齿)的第二端668。第一端666能够直接或者间接地(例如,经由安装在牙齿上的附着体或者壳体矫正器)联结到下牙654的牙冠。第二端668能够直接或者间接地(例如,经由安装在牙齿上的附着体或者佩戴在上牙670上的壳体矫正器)而联结到上牙670的牙冠。第一端666能够被定位在相对于第二端668的前侧,从而在外力产生机构652内产生张力,该张力在向后方向上拉动下齿弓。该张力能够被视作由远中分力672和外凸分力674构成。应当理解,张力还能够被视作由施加在上齿弓上的近中分力和外凸分力(未示出)构成。在许多实施例中,远中分力672传递到下齿弓的后牙660,从而增强锚固,并且维持它们在下齿弓内的位置(例如,抑制向前移动)。可选择地,远中分力672传递到下齿弓的前牙658,从而增强向后移动,例如,用以关闭间隙。
161.图7示出了包括外力产生机构702的校准设备700。校准设备700包括佩戴在多个上牙704上的壳体矫正器(为了清楚而省略)。可选择地,校准设备700包括多个附着体706,该多个附着体606装接到上牙704,并且被布置为与壳体矫正器互相作用,从而将力施加到牙齿704上。在许多实施例中,牙齿704包括一组一个以上前牙708和一组一个以上后牙710,并且校准设备在前牙708上产生一个以上力矩712,并且在后牙710上产生一个以上反力矩714。力矩712和反力矩714能够在维持如上文和此处所述的后牙710的锚固的同时,引起前牙708的缩回,例如,以关闭前牙708与后牙710之间的间隙。
162.在图示的实施例中,外力产生机构702具有联结到一个以上上牙704(例如,上犬齿)的第一端716,以及联结到植入到患者的上颌的骨头中的临时锚固装置(tad)的第二端
718。第一端716能够直接或者间接地(例如,经由安装在牙齿上的附着体或者壳体矫正器)联结到上牙704的牙冠。第一端716能够被定位在相对于第二端718的前侧,从而在外力产生机构702内产生张力,该张力在向后方向上拉动上齿弓。该张力能够被视作由远中分力722和外凸分力724构成。在许多实施例中,远中分力722传递到后牙710,从而增强锚固,并且维持它们在上齿弓内的位置(例如,抑制向前移动)。可选择地,远中分力722传递到前牙708,从而增强向后移动,例如,用以关闭间隙。
163.在替代实施例中,外力产生机构能够联结在下牙与患者的下颌中的tad之间,从而将远中分力施加到下颌的牙齿。其它的构造和组合(例如,外力产生机构联结在上颌中的tad与下牙之间,或者外力产生机构联结在下颌中的tad与上牙之间)也是可行的并且落入本发明的范围内。另外,应当理解,本文描述的外力产生机构的实施例能够修改,从而在诱导一个以上后牙的移动的同时,增大一个以上前牙的锚固。例如,iii类牵引能够用于支撑下齿弓中的一个以上后牙的锚固,例如,通过将iii类牵引的一端联结到上齿弓的后部区域中的tad,从而促进下齿弓中的一个以上前牙的缩回。作为另一个实例,ii类牵引能够用于支撑上齿弓中的一个以上后牙的锚固,例如,通过将ii类牵引的一端联结到下齿弓的后部区域中的tad,从而促进上齿弓中的一个以上前牙的缩回。
164.本公开的正畸壳体矫正器能够包括牙齿收容腔体,该牙齿收容腔体能够被成型为产生本文描述的力、力矩、和/或反力矩。在许多实施例中,牙齿收容腔体包括远离对应的被收容牙齿的当前位置和/或朝向的位置和/或朝向,并且由于位置和/或朝向之间的不匹配所引起的牙齿收容腔体的偏斜和/或变形导致对牙齿施加力。牙齿收容腔体的位置和/或朝向能够被构造为向牙齿施加力系统,从而引起牙齿重定位至目标位置和/或朝向。牙齿收容腔体的位置和/或朝向可以与被收容的牙齿的目标位置和/或朝向大致相似。或者,牙齿收容腔体的位置和/或朝向可以远离(例如,不同于)被收容的牙齿的目标位置和/或朝向。
165.图3a示出了治疗阶段完成之前的牙齿位置、在阶段完成时的目标位置以及用以完成治疗的阶段的牙齿收容腔体的位置和朝向。多个牙齿10中的被收容的牙齿包括在放置矫正器11之前的位置和朝向。能够利用用户输入而确定在治疗阶段完成时的牙齿的目标位置和朝向200。聚合物壳体矫正器11的多个牙齿收容腔体101中的每个牙齿收容腔体包括沿着移动的目标方向105远离目标位置和朝向的一个以上的位置和朝向。目标移动可以包括移动矢量,例如,利用远离目标位置和朝向的牙齿收容腔体的位置和朝向。被收容的牙齿可以具有一个以上的附着体,并且聚合物壳体可以具有一个以上的接合结构,以提供如本文所述的差值力矩。
166.图3b示出了聚合物壳体矫正器,该聚合物壳体矫正器被构造为具有一个以上的作动点,以利用处于包括牙齿的非外凸位置和朝向的目标位置和朝向的牙齿存储能量。在所述实施例中,力朝向内凸方向,并且不足以使牙齿内凸,并且足以抑制牙齿的外凸。聚合物壳体矫正器的牙齿收容腔体包括处于独立的非装载构造的形状轮廓50。当聚合物壳体矫正器收容牙齿时,聚合物壳体矫正器的作动点偏斜至偏斜后的形状轮廓50,从而存储能量,并且与被收容的牙齿的形状轮廓60相一致。存储的能量提供了朝向内凸方向的力,其不足以使牙齿内凸。
167.或者,目标位置和朝向包括牙齿的非内凸位置和朝向,并且力朝向外凸方向,并且不足以使牙齿外凸,并且足以抑制牙齿的内凸。
168.图4示出了根据实施例的确定远离目标位置的矫正器的牙齿收容腔体的方法400。能够利用一个以上的处理器进行方法400中的一些或者所有步骤。在许多实施例中,自动地进行方法400中的一些或所有步骤,而不要求用户输入。作为替代或者附加,方法400的一些或所有步骤可以涉及例如经由用户输入界面或者装置接收到的用户输入。
169.在步骤410中,接收一个以上牙齿的初始位置的初始数据组。例如,初始数据组能够代表患者的牙齿的初始排列。初始数据组能够包括例如经由本领域的技术人员已知的扫描技术获得的处于初始排列的牙齿的一个以上的三维数字模型。
170.在步骤415中,用户操控初始数据组以确定用于治疗的多个阶段中的每个阶段的一个以上牙齿的目标位置。在许多实施例中,用户(例如,正畸从业者或者技师)经由用户界面(例如,被实施为治疗规划软件的一部分并且在显示器上呈现给用户的用户界面)输入命令,从而指定牙齿的目标位置。例如,初始数据组的牙齿能够被彼此划分,从而可以独立操控,并且用户能够将各个牙齿从初始位置移动到目标位置。用户能够观看牙齿,并且确定适合多个治疗阶段的每个治疗阶段的牙齿位置。
171.在步骤420中,接收一个以上牙齿的目标位置的目标数据组。目标数据组能够代表通过本文所述的矫正器的治疗而期望实现的患者的牙齿的目标排列。
172.处理器系统可以包括用以在多个牙齿中的一个以上牙齿上包括附着体的指令。在许多实施例中,处理器系统包括确定附着体和矫正器的附着体接合结构的形状的指令。
173.作为替代或者组合,处理器系统可以包括用以包括联结到多个牙齿中的一个以上牙齿的外力产生机构的指令。在许多实施例中,处理器系统包括这样的指令:确定外力产生机构的形状和位置,从而对一个以上的牙齿施加目标力,例如,用以对后牙的候补锚固,如本文所述。
174.在步骤430中,产生表示一个以上牙齿的一个以上中间位置的一个以上的中间数据组。各个中间数据组能够对应于包括在初始排列与目标排列之间的牙齿的中间排列的治疗阶段。在许多实施例中,中间数据组代表随着一个以上牙齿从它们的初始位置向它们的目标位置移动而由该一个以上牙齿经历的连续的牙齿排列的序列。可选择地,中间数据组能够显示给用户(例如,作为显示器上的可操控的三维数字牙齿模型),以使得用户能够根据期望而直接观看和/或修改中间排列。在替代实施例中,中间数据组不显示给用户,使得自动地进行步骤430的治疗阶段,而不涉及用户输入。
175.在步骤440中,产生用于使一个以上牙齿从初始位置向目标位置移动的一个以上的矫正器几何结构。几何结构能够包括用于本文描述的矫正器的牙齿收容腔体的几何结构(例如,位置、朝向、内表面轮廓、附着体装接结构)。各种技术能够用于确定用于移动牙齿的适当的矫正器几何结构。例如,各个矫正器能够被设计为使一个以上牙齿从初始、中间以及目标排列的序列中的前一排列向随后排列移动。可选择地,矫正器能够被设计为:当前一排列与随后排列中的牙齿的位置不改变(例如,锚固牙齿)时,保持一个以上的牙齿。在许多实施例中,各个矫正器的几何结构被成型为将力系统施加到各个牙齿上(例如,直接施加在牙齿表面上,或者经由安装在牙齿上的附着体而间接施加),以引起期望的牙齿移动(或保持)。力系统能够包括如本文所提供的力、反力、力矩或反力矩的任意适当的组合。例如,矫正器几何结构能够被设计为当被患者佩戴时,在牙齿(或多个牙齿)上产生成对的力矩与反力矩,从而产生用于控制牙齿移动的差值力矩,如本文所描述的。处理器可以包括这样的指
令:响应于对牙齿的目标差值力矩而包括附着体,从而使牙齿在目标方向上移动。处理器可以包括这样的指令:为了调整施加到一个以上牙齿的力系统,而包括外力产生机构。
176.在许多实施例中,处理器系统包括确定如本文所描述的一个以上的力的指令。处理器系统可以包括这样的指令:其确定绕着第一牙齿的第一阻力中心的一个以上的第一力、第一牙齿的第一阻力中心、第一牙齿的第一反力、绕着第一牙齿的第一力矩、第一牙齿的第一反力、第一牙齿的第一反力矩、与第二力相反的第一力、与第二力矩相反的第一力矩、第一力与第二力的总和、沿着牙齿移动的期望方向的第一力的总和、以及对于第一牙齿的迭代(iteration),以在目标方向上移动第一牙齿。处理器系统能够被构造为确定对于第二牙齿的这些力的每个力,以对于多个牙齿的每个牙齿的相似的力。
177.在许多实施例中,矫正器的牙齿排列远离(偏离或者不同于)通过佩戴矫正器期望实现的对应牙齿排列。例如,矫正器的至少一个牙齿收容腔体能够包括与对应的被收容的牙齿的期望的位置和/或朝向远离的位置和/或朝向。矫正器几何结构与对应的期望的牙齿排列之间的这种偏移能够允许力系统的更加精确的控制和施加,用以移动(或保持)牙齿(例如,经由不同的力矩的施加)。相比于矫正器几何结构匹配期望的牙齿排列(例如,牙齿收容腔体的位置和/或朝向匹配牙齿的期望的位置和/或朝向)的替代方法,该方法能够是有利的。适于根据本文公开的实施例而并入的响应于移动目标以及相关的力而实现移动的牙齿响应数据被描述在2009年11月20日提交的美国申请序列号no.12/623,340中,该专利2010年6月3日被公开为u.s.2010/0138025,标题为“包括参量附着体的正畸系统和方法”,并且被描述在2013年4月17日提交的美国申请序列号no.13/865,091中,该专利被公开为u.s.2013/0230818,标题为“用于优化牙科校准器几何结构的方法和系统”,上述专利的全部公开已经预先通过引用而并入本文。矫正器能够被设计有牙齿收容腔体,该牙齿收容腔体响应于针对多个治疗阶段的每个治疗阶段中的多个牙齿中的每个牙齿的牙齿移动数据和目标牙齿位置,而定位和/或朝向。在许多实施例中,不匹配对应的牙齿排列的如本文所述的矫正器几何结构的使用能够提高正畸矫正器实现计划的牙齿移动的性能。
178.在许多实施例中,产生的矫正器几何结构不显示给用户,使得用户仅看到用于移动牙齿的连续的牙齿排列的序列,而看不到用于实现这样的排列的对应的矫正器几何结构。这能够有益于简化和一体化呈现给用户的信息,特别是当对于多个治疗阶段的每个治疗阶段,包括牙齿收容腔体的形状轮廓的位置和朝向的矫正器几何结构从期望的牙齿排列偏移时。
179.可选择地,在步骤440之后,产生的矫正器几何结构能够被输出,例如作为用于控制制造机的指令,用于制造具有指定几何结构的正畸矫正器,以及可选择地,与矫正器协同使用的牙齿附着体和/或外力产生机构。
180.虽然以上步骤示出了根据实施例确定矫正器几何结构的步骤400,但是本领域的普通技术人员应当理解基于本文描述的教导的多种变化。一些步骤可以包括子步骤。许多步骤可以重复,只要其为有益的。一些步骤可以去除,并且可以设置额外的步骤。方法400中的一个以上步骤可以利用数据处理系统执行,诸如本文描述的实施例。一些步骤是可选择的,诸如步骤430。步骤的顺序是能够变化的。例如,步骤410、415、420和430可以以任何适当的顺序进行。
181.图5示出了根据实施例的数据处理系统500的简化方框图,该数据处理系统500可
以在执行根据本文描述的方法和处理中使用。数据处理系统500通常包括至少一个处理器502,该处理器502经由总线子系统504与一个以上的周边装置通信。这些周边装置通常包括存储子系统506(存储器子系统508和文件存储子系统514)、一组用户输入和输出装置518、以及向外部网络516的接口。该接口被示意性地示出为“网络接口”方框516,并且经由网络接口524而连接到其它数据处理系统中的对应的接口装置。数据处理系统500能够包括例如一个以上的计算机,诸如个人计算机、工作站、主机、笔记本电脑等。
182.用户界面输入装置518不限于任意特别的装置,并且能够通常包括例如键盘、定位装置、鼠标、扫描仪、交互显示器、触摸屏、控制杆等。相似地,各种用户界面输出装置能够被采用在本发明的系统中,并且能够包括例如打印机、显示器(例如,视觉的、非视觉的)系统/子系统、控制器、投影装置、音频输出等。
183.存储子系统506维持基本要求的编程,包括具有指令(例如,操作指令等)的计算机可读介质、以及数据架构。本文描述的程序模块通常存储在存储子系统506中。存储子系统506通常包括存储器子系统508和文件存储子系统514。存储器子系统508通常包括:多个存储器(例如,ram 510、rom 512等),包括用于在程序执行期间存储固定指令、指令和数据的计算机可读存储器、基本输入/输出系统等。文件存储子系统514为程序和数据文件提供永久(非易失)存储,并且能够包括可移除的或者固定的驱动器或者介质、硬盘、软盘、cd
‑
rom、dvd、光学驱动等中的一者以上。一个以上的存储系统、驱动器等可以位于远程位置处,经由网络上的服务器或者经由因特网/万维网而连接。在当前文本中,通用地使用术语“总线子系统”以包括用于使得各种构件和子系统根据期望互相通信的任意机构,并且能够包括已知或者被视作适于在其中使用的各种适当的构件/系统。应当理解,系统的各种构件可以而不必须处于相同的物理位置处,而可以经由各种局域网或广域网传播媒介、传输系统等连接。
184.扫描仪520包括用于获得患者的牙齿的数字表示(例如,图像、表面形貌数据等)的任意装置(例如,通过扫描诸如铸型521这样的牙齿的物理模型,通过扫描从牙齿采取的印模,或者通过直接扫描口内腔),该数字表示能够或者从患者得到,或者从诸如牙齿矫正医师这样的治疗的专业人员得到,并且扫描仪520包括向数据处理系统500提供用于进一步处理的数字表示的装置。扫描仪520可以位于相对于系统的其它构件的远程位置处,并且能够经由例如网络接口524而与数据处理系统500通信图像数据和/或信息。制造系统522基于治疗计划而制造矫正器523,该治疗计划包括从数据处理系统500接收到的数据组信息。制造系统522能够例如位于远程位置处,并且经由网络接口524从数据处理系统500接收数据组信息。
185.虽然本文已经示出和描述了本公开的优选实施例,但是对本领域的技术人员明显的是,仅以实例的方式提供了这些实施例。在不背离本发明的情况下,本领域的技术人员将进行各种变化、改变和替换。应当理解的是,在实施本发明时可以采用本文描述的本发明的实施例的各种替代实施例。期望的是,以随附的权利要求限定本发明的范围,并且这些权利要求和它们的等同物的范围内的方法和结构也从而被涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。