1.本发明属于烟丝杂质识别领域,具体涉及一种烟丝杂物智能识别方法。
背景技术:
2.在卷烟生产领域,制丝车间加工的烟叶中,可能包含各种各样的杂物,例如:鸡毛、麻绳、黑色胶皮、桔梗、纸箱板。同样,在残烟回收线中,经过残烟处理机后,回收的烟丝会把乳白的胶块、过滤嘴丝束、白色烟纸、以及各种烟丝的水松纸等非烟杂物,打碎后经后续的筛选装置无法把细小的非烟物体分选干净,并流入到后续生产环节,这将严重影响回收烟丝的纯净度。
3.针对残烟回收线,提高回收烟丝的纯净度,是至关重要的课题。如果回收烟丝中包含水松纸、纸片、胶粒等杂物,尤其是胶粒,属于一类杂物,回收烟丝回参后,将对烟丝照成二次污染。一旦一类杂物进入到卷烟机中,将无法检测和判断,流入市场后,严重影响卷烟品牌。
4.目前可采用的提纯方式有:
5.1、振槽网孔筛选:布局不同尺寸大小的网孔板,采用振槽的方式振动,筛选与烟丝尺寸偏差较大的非烟杂物;其优点在于简单,可以筛选较大尺寸的嘴棒、烟支、胶块等杂物,但是跟烟丝尺寸接近的,例如5mm*5mm的杂物无能为力。
6.2、风分筛选:采用空气动力学的方式,把重的物体(例如胶块)分离,轻质的烟丝经过气流,进入下一个工序;该方式的优点在于物体的比重,当杂物的比重接近于烟丝时,其分离效果不佳。
7.3、视觉成像检测:传统的视觉成像采用的一个标准的光源,在可见光的波段范围,对物料进行成像,通过图像处理的方式,识别出烟丝和杂物;其对于白色的胶块、白色的纸片,其识别效果较好,但对于接近烟草颜色的水松纸就无能为力,例如黄色的水松纸、棕黑色水松纸、粘连烟灰的胶块,这些难于识别的杂物,都有一个共性,其颜色跟烟叶颜色接近。
8.在现有的背景条件下,提纯方式中的振槽网孔筛选和风分筛选的方式,其提升不高,只有在视觉成像检测以及图像分割的方向,还有机会提高类烟颜色的杂物的成像和识别效果。基于此,需要一种新烟丝杂物智能识别方法来对烟丝杂物进行提纯。
技术实现要素:
9.鉴于上述,为了提高对黄色水松纸、棕褐色色水松纸、粘连烟灰的胶块等难于识别的杂物的识别率,达到对杂物能进行有效的剔除,本发明的目的是提供一种烟丝杂物智能识别方法,采用硬件与算法相结合的方式,来对杂物进行高效地识别。
10.实施例提供的一种烟丝杂物智能识别方法,包括以下步骤:
11.采用线阵全光谱光源对混有杂物烟丝进行光照,所述线阵全光谱光源覆盖400nm
‑
1000nm的波段范围;
12.采集线阵全光谱光源光照下的烟丝图像,并将烟丝图像像素转换为多个向量;
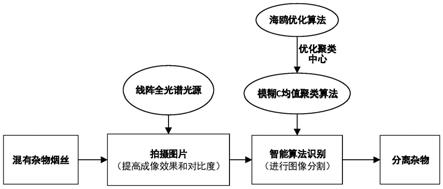
13.将多个向量划分成多个类,利用模糊c均值算法对向量进行聚类时,采用海鸥优化算法更新聚类中心,优化结束后,依据聚类结果进行图像分割以分离杂物。
14.优选地,所述线阵全光谱光源由光源设备发射,所述光源设备包括由u型散热管连接且呈对称分布的两块光源基材,所述光源基材上安装有多个条形led光源,所述led光源发射400nm
‑
1000nm的波段范围的光照。
15.优选地,所述两块光源基材穿过u型散热管的两壁,通过紧固件固定在u型散热管的两壁。
16.优选地,所述两块光源基材的内壁为弧形,两块光源基材的弧形内壁相对设置,且两块光源基材3中间形成一个用于拍照的缝,多个条形led光源安装在弧形内壁,对弧形内壁形成的空间进行光照。
17.优选地,所述u型散热管中空,以输送冷却液,达到水冷散热方式,其中冷却液优选为水。
18.优选地,所述u型散热管外壁包裹有散热鳍片,以达到风冷散热方式。
19.优选地,利用模糊c均值算法对向量进行聚类过程中,采用的目标函数q为:
[0020][0021]
其中,i为向量的索引,j为聚类中心的索引,s为向量个数,c为聚类中心个数,x
i
表示第i个向量,y
j
表示第j个聚类中心,w表示模糊权重指数,d
ij
表示模糊隶属度矩阵,具体计算公式为:
[0022][0023]
其中,k为聚类中心索引,聚类中心y为通过海鸥优化算法在解空间中搜索出最优聚类中心。
[0024]
优选地,采用海鸥优化算法更新聚类中心的过程为:
[0025]
将向量初始化为海鸥优化算法的每个海鸥位置,利用海鸥优化算法进行迁移和攻击运动,即进行全局搜索和局部搜搜,以在解空间中搜索出最优向量作为最优聚类中心;
[0026]
海鸥迁徙过程中,海鸥位置变化过程为:
[0027][0028]
其中,mt)表示海鸥不会发生冲突的新位置,k表示海鸥在解空间中的运动方式,p
a
(t)表示海鸥在解空间中当前所处位置,f表示能够改变k的频率,x表示算法的最大的迭代次数,t表示当前迭代次数;
[0029]
h(t)=v(p
b
(t)
‑
p
a
(t))
[0030]
其中,h(t)表示海鸥向最优解靠近的最佳运动方向,p
b
(t)表示海鸥的最佳位置,v表示0到k2变化的随机数;
[0031]
海鸥攻击过程为:
[0032]
p
a
(t)=b(t)r3αsinαcosα p
b
(t)
[0033]
其中,p
a
(t)作为海鸥攻击猎物的位置,α表示0至2π的随机值,r表示海鸥攻击猎物时螺旋运动轨迹的半径,r=m z e
α
,m、z表示海鸥螺旋状运动轨迹的相关常数。
[0034]
优选地,所述依据聚类结果进行图像分割以分离杂物包括:
[0035]
依据聚类结果筛选出杂物对应的像素,并将这部分像素区域分割出来,以指导分类杂物。
[0036]
与现有技术相比,实施例提供的烟丝杂物智能识别方法具有的有益效果至少包括:
[0037]
通过线阵全光谱光源提供的光照来采集烟丝图像,提升了烟丝成像效果和对比度,以获得更清楚的烟丝图像,在此基础上,将图像像素转化为向量,利用模糊c均值算法对向量进行聚类以搜索杂物像素点,聚类过程中,采用海鸥优化算法更新聚类中心,来提升聚类的准确性,进而提升图像识别的准确性,最后依据聚类结果进行图像分割以分离杂物,极大地提高了对杂物的识别率,保障了回收烟丝的纯净度。
附图说明
[0038]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动前提下,还可以根据这些附图获得其他附图。
[0039]
图1是一实施例提供的烟丝杂物智能识别方法的流程图;
[0040]
图2是一实施例提供的光源设备的结构示意图;
[0041]
图3是一实施例提供的soa
‑
fcm算法的流程图;
[0042]
图4是一实施例提供的线阵全光谱光源的光谱图。
具体实施方式
[0043]
为使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不限定本发明的保护范围。
[0044]
为了提高对黄色水松纸、棕褐色色水松纸、粘连烟灰的胶块等难于识别的杂物的识别率,达到对杂物能进行有效的剔除。实施例提供了一种烟丝杂物智能识别方法。如图1所示,实施例提供的烟丝杂物智能识别方法,包括以下步骤:
[0045]
步骤1,采用线阵全光谱光源对混有杂物烟丝进行光照,所述线阵全光谱光源覆盖400nm
‑
1000nm的波段范围;
[0046]
实施例中,线阵全光谱光源由光源设备发射,能够具备全光谱的照明光源,从400nm
‑
1000nm的波段范围,涵盖700nm
‑
1000nm的近红外波段光谱。在近红外光谱下,可有效的提高难识别杂物的图像区分,提高对杂物的成像效果和对比度。
[0047]
如图2所示,光源设备1包括u型散热管2、光源基材3、条形led光源4,其中,两块光源基材3通过u型散热管2固定,且呈对称分布,这样能够使其上的led光源全对称。具体块光源基材3穿过u型散热2管的两壁,通过紧固件5固定在u型散热管2的两壁,其中,紧固件5可以是螺钉,通过螺钉配合管壁上的螺纹,对光源基材3的两端固定到u型散热管2的管壁上。
[0048]
实施例中,两块光源基材3的内壁为弧形,两块光源基材3的弧形内壁相对设置,且两块光源基材3中间形成一个用于拍照的缝,多个条形led光源安装在弧形内壁,对弧形内壁形成的空间进行光照。
[0049]
实施例中,u型散热管中空,以输送冷却液,达到水冷散热方式,其中冷却液优选为水。u型散热管外壁的还可以包裹有散热鳍片,以达到风冷散热方式。
[0050]
实施例中,发光led由可见光波段和近红外波段led 6组合发光,增加的近红外波段led可以使得条形led光源4发光波段涵盖400nm
‑
1000nm范围,光谱如图4所示,发光led按照圆柱面布局,成像点位置接收多个角度的led光源照射。
[0051]
实施例中,条形led光源4采用导热系数较高的铝基材料作为电路板底板,其上焊接有见光波段和红外波段led灯,多个条形led光源4安装到光源基材2上,形成1/4圆柱布局的曲面光源;条形led光源4采用对称设计,左右两侧的光源是全对称,便于安装和生产。
[0052]
步骤2,采集线阵全光谱光源光照下的烟丝图像,并将烟丝图像像素转换为多个向量。
[0053]
烟丝图像采集时,光源设备1安装在运动皮带的上方,相机1安装在光源设备1的上方,进行运动拍照成像。光源设备1可以多角度布局、多组布局,其物料可接受大于14个角度的光线,是一个最佳的打光方式进行成像。光源设备1采用铜管水冷的散热方式,具有极高的照明的亮度和稳定性。
[0054]
步骤3,将多个向量划分成多个类,利用模糊c均值算法对向量进行聚类时,采用海鸥优化算法更新聚类中心,优化结束后,依据聚类结果进行图像分割以分离杂物。
[0055]
模糊c均值聚类算法作为一种聚类算法,其初始的聚类中心需要人为设定,聚类中心设定的是否恰当,将直接影响最终的聚类效果。因此,为了提升聚类效果,使图像分割更加准确。实施例提出海鸥优化模糊c均值算法(soa
‑
fcm),采用海鸥优化算法对模糊c均值的聚类中心进行优化,对图像中的杂物进行识别分割,来到达对杂物精准识别的效果。
[0056]
拍摄后的图像共有s个像素,即s个向量x
i
(i=1,2,3,
……
,s),将这s个向量划分成c个类,每个类的聚类中心为y,模糊隶属度矩阵为d,模糊权重指数为w,利用模糊c均值算法对向量进行聚类过程采用的目标函数q为:
[0057][0058]
其中,d
ij
表示模糊隶属度矩阵,具体计算公式为:
[0059][0060]
其中,k为聚类中心索引,聚类中心y为通过海鸥优化算法在解空间中搜索出最优聚类中心。
[0061]
如图3所示,采用海鸥优化算法更新聚类中心的过程为:
[0062]
将向量初始化为海鸥优化算法的每个海鸥位置,利用海鸥优化算法进行迁移和攻击运动,即进行全局搜索和局部搜搜,以在解空间中搜索出最优向量作为最优聚类中心;
[0063]
海鸥迁徙过程中,海鸥位置变化过程为:
[0064][0065]
其中,n(t)表示海鸥不会发生冲突的新位置,k表示海鸥在解空间中的运动方式,p
a
(t)表示海鸥在解空间中当前所处位置,f表示能够改变k的频率,x表示算法的最大的迭代次数,t表示当前迭代次数;
[0066]
h(t)=v(p
b
(t)
‑
p
a
(t))
[0067]
其中,h(t)表示海鸥向最优解靠近的最佳运动方向,p
b
(t)表示海鸥的最佳位置,v表示0到k2变化的随机数;
[0068]
海鸥攻击过程为:
[0069]
p
a
(t)=b(t)r3αsinαcosα p
b
(t)
[0070]
其中,p
a
(t)作为海鸥攻击猎物的位置,α表示0至2π的随机值,r表示海鸥攻击猎物时螺旋运动轨迹的半径,r=m z e
α
,m、z表示海鸥螺旋状运动轨迹的相关常数。
[0071]
实施例中,依据聚类结果进行图像分割以分离杂物包括:依据聚类结果筛选出杂物对应的像素,并将这部分像素区域分割出来,以指导分类杂物。
[0072]
实施例提供的烟丝杂物智能识别方法,在硬件方面:在红外波段下的反光率不一样,烟草的红外波段的光谱特点是比较接近,然而难以识别的棕褐色水松纸、黄色水松纸、粘连烟灰的胶块,在红外波段下,其光谱特性跟烟叶有明显区分。建立在这一套全光谱光源基础下,采集的烟丝图片和杂物图片有较为明显的区别,非常有利于图像算法的识别。
[0073]
在图像识别的算法方面:采用soa
‑
fcm算法对图像进行分割,结合之前全光谱光源所生成的图像,该算法对棕褐色水松纸等与烟丝颜色相近的杂物,具有精准的识别效果,并且该算法还具有可靠性强,后期运行稳定等优点。这套全光谱光源与soa
‑
fcm算法相结合的方案对杂物的识别率带来实质性的提高,对杂物精选带来革命性的提升。
[0074]
同时,本发明也具有较大的普适性,可以广泛的应用于制丝加工的其他工艺环节,用于检测和甄别各种杂物,市场前景非常广阔。
[0075]
以上所述的具体实施方式对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的最优选实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。