1.本发明涉及电动轮转子壳体轻量化技术领域,特别是涉及一种电动轮转子壳体轻量化设计方法。
背景技术:
2.二十一世纪以来,随着人口基数持续增加、人民生活水平逐渐提高以及国家对汽车产业发展的大力扶持,汽车保有量正在迅速增加,导致环境污染与能源消耗等问题更加突出,汽车工业发展将面临巨大挑战。传统的燃油汽车在低碳环保、节能减排的政策法规压力下,已经无法满足严格的环保需求,发展新能源汽车将有效应对当前面对的节能环保问题。电动汽车因为低污染排放、产生噪音低和能源使用效率高等特点,成为汽车行业主要发展方向。
3.当前,驱动系统技术成为电动汽车领域里最热门的研究方向之一。按驱动方式可分为三类:集中电机驱动、轮边电机驱动与轮毂电机驱动。其中,轮毂电机驱动因为集成化程度高、高功率密度及独立转矩控制等特点受到汽车行业广大学者的青睐。
4.轮毂电机将驱动、制动、传动及连接装置都合理布置在轮毂内部空间。轮毂电机驱动技术具备以下独特优势:(1)许多复杂的机械传动部件被省略,车辆整体结构得到优化。传统汽车中离合器、变速器、差速器、传动轴等部件在轮毂电机中不再出现,整车减重,续航能力提高,性能也会提高。(2)传动链得到简化,传动效率提高。轮毂电机直接驱动车轮,可以提高效率。(3)空间布置灵活。省去了中间传动结构,整车可布置空间将大大增加,乘客可以享受的空间更加宽敞。(4)方便控制,能够实现多种复杂的驱动方式。轮毂电机各车轮都可单独驱动,能实现非常复杂的控制,甚至可以调整自身转速实现差动转向。(5)容易实现模块化,更容易应用新能源技术。轮毂电机集成化程度高,产品开发周期缩短;制动能量回收、再生制动等新能源技术容易应用到轮毂电机上。
5.但是轮毂电机驱动技术也存在缺陷:(1)轮内结构空间有限,轮毂电机集成化技术需要深入研究。(2)轮毂电机驱动系统引入车轮内,导致汽车簧下质量增加,直接影响汽车行驶过程中加速性、平顺性和操纵性。
6.按照转子类型可分为内转子与外转子。两者存在以下区别:(1)与转子一起旋转的部件不一样,与主轴同转动是内转子,与外壳一起旋转的是外转子;(2)内转子是把外壳做定子,外转子则使用外壳做转子;(3)外转子一般极数多,扭矩高转速低,内转子则相反。内转子电机在高速中运转,比功率和效率高,体积小质量轻,同时配备减速器,输出扭矩增大,但是内部齿轮容易磨损,内转子和减速器的方案,对轮内空间布置非常有挑战性,目前尚未出现量产产品。外转子电机取消了机械减速机构,传动效率提高,但是在需要承载大扭矩的情况下容易损坏电池和永磁体,电机效率峰值范围变小。外转子轮毂电机虽然减少半轴和减速器部分,但是其最大劣势主要是重量问题。
7.目前,在我国交通体系中占据重要地位的a和a0级乘用车,已经成为电动汽车乘用车市场的主力,因此,面向大众需求研发适用于a级和a0级的紧凑型、轻量化、高可靠性的轮
毂电机,对推动我国纯电动乘用车的发展具有重要意义。a和a0级乘用车表现为小型、紧凑、节能及低成本,轮内空间更加狭小,内部环境更加复杂,轮毂电机开发面临的技术非常具有挑战性。因此,轮毂电机轻量化设计技术需要进一步研究。
技术实现要素:
8.本发明的目的是提供一种电动轮转子壳体轻量化设计方法,以解决现有技术的问题,能够在满足静态特性、动态特性及疲劳耐久性要求下,实现转子壳体的轻量化。
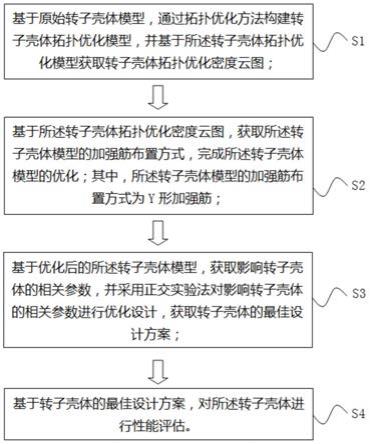
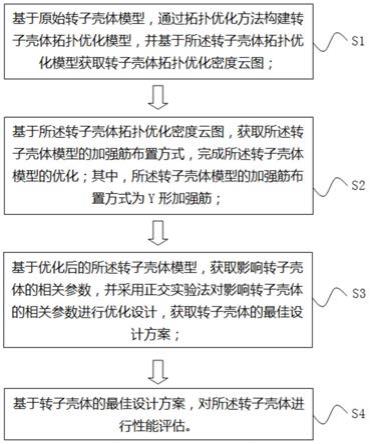
9.为实现上述目的,本发明提供了如下方案:本发明提供一种电动轮转子壳体轻量化设计方法,包括:
10.基于原始转子壳体模型,通过拓扑优化方法构建转子壳体拓扑优化模型,并基于所述转子壳体拓扑优化模型获取转子壳体拓扑优化密度云图;
11.基于所述转子壳体拓扑优化密度云图,获取所述转子壳体模型的加强筋布置方式,完成所述转子壳体模型的优化;其中,所述转子壳体模型的加强筋布置方式为y形加强筋;
12.基于优化后的所述转子壳体模型,获取影响转子壳体的相关参数,并采用正交实验法对影响转子壳体的相关参数进行优化设计,获取转子壳体的最佳设计方案。
13.优选地,通过拓扑优化变密度法构建所述转子壳体拓扑优化模型。
14.优选地,所述转子壳体拓扑优化模型以体积分数为约束,以结构柔度最小为目标进行构建。
15.优选地,所述转子壳体拓扑优化模型如下式所示:
16.ρ(x)={ρ1,ρ2,...,ρ
n
}
t
∈ω
[0017][0018][0019]
式中,ρ(x)为设计变量集,n为设计变量的个数,ω为设计空间;ρ
i
为第i个设计变量,即第i个单元的单元密度;v为体积函数;c为目标函数即柔度;d为节点的位移;k为刚度矩阵;ε为节点的应变;σ为节点的应力;v
l
(x)为体积设定;v0为初始体积値;d
m
(x)为极变形函数。
[0020]
优选地,所述转子壳体拓扑优化模型以疲劳寿命为约束,以质量最小为目标进行构建。
[0021]
优选地,所述转子壳体拓扑优化模型如下式所示:
[0022]
ρ(x)={ρ1,ρ2,...,ρ
n
}
t
∈ω
[0023]
min m=ρv
[0024][0025]
式中,ρ(x)为设计变量集,n为设计变量的个数;ρ
i
为第i个设计变量,即第i个单元
的单元密度;ρ为设计变量即单元密度;ν为体积函数;m为目标函数即质量;σ
l
(x)为应力设定;[σ]为应力限值;d
m
(x)为极变形函数。
[0026]
优选地,基于转子壳体的质量、应力、位移获取影响转子壳体的相关参数。
[0027]
优选地,获取转子壳体的最佳设计方案的方法包括:
[0028]
基于影响转子壳体的相关参数进行转子壳体正交试验,并获取转子壳体正交试验中各方案的试验结果;
[0029]
基于转子壳体正交试验中各方案的试验结果,采用极差分析法获取影响转子壳体的各相关参数的主次关系;
[0030]
基于影响转子壳体的各相关参数的主次关系对优化后的所述转子壳体模型进行更新,并通过试验仿真得到转子壳体的最佳设计方案。
[0031]
优选地,影响转子壳体的相关参数包括所述y形加强筋的宽度、所述y形加强筋的厚度变化量以及无y形加强筋处的厚度变化量。
[0032]
优选地,在获取转子壳体的最佳设计方案后,还基于所述最佳设计方案对转子壳体进行性能评估,性能评估的方法包括但不限于静态特征验证、动态特性验证、疲劳耐久性验证。
[0033]
本发明公开了以下技术效果:
[0034]
本发明通过拓扑优化变密度方法,建立了转子壳体拓扑优化模型对转子壳体进行拓扑优化,考虑转子壳体封闭性和拓扑优化结果,将转子壳体表面布置成y形的整体加强筋,并以转子壳体表面加强筋宽度、厚度变化及无加强筋处厚度变化为试验因素,将转子壳体质量、应力及位移作为试验指标,建立三因素三水平的正交试验设计方案,确定出以轻量化为主的最优水平组合;对轻量化转子壳体在静态特性、动态特性和疲劳耐久性方面的验证结果表明,轻量化后转子壳体符合设计要求,最终实现减重14.05%。
附图说明
[0035]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0036]
图1为本发明实施例中电动轮转子壳体轻量化设计方法流程图;
[0037]
图2为本发明实施例中转子壳体
‑
制动盘系统结构示意图;
[0038]
图3(a)、图3(b)分别为本发明实施例中方案一转子壳体拓扑优化密度云图的立体示意图和平面示意图;
[0039]
图4(a)、图4(b)分别为本发明实施例中方案二转子壳体拓扑优化密度云图的立体示意图和平面示意图;
[0040]
图5为本发明实施例中y形加强筋的结构示意图;
[0041]
图6为本发明实施例中通过轻量化设计得到的转子壳体示意图;
[0042]
图7为本发明实施例中轻量化前后转子壳体动态特性的对比图;
[0043]
图8为本发明实施例中疲劳损伤计算流程图;
[0044]
图9为本发明实施例中制动载荷雨流计数示意图;
[0045]
图10为本发明实施例中轻量化前后转子壳体在各级载荷等级下损伤值的对比图。
具体实施方式
[0046]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0047]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0048]
参照图1所示,本实施例提供一种电动轮转子壳体轻量化设计方法,包括:
[0049]
s1、基于原始转子壳体模型,通过拓扑优化方法构建转子壳体拓扑优化模型,并基于转子壳体拓扑优化模型获取转子壳体拓扑优化密度云图;
[0050]
目前转子壳体设计已经趋于极限,同时考虑到转子壳体的封闭性因素,将在原有模型的基础上通过拓扑优化结果提出改进。
[0051]
由于转子壳体在制动工况下应力值最大,为此,本实施例中轻量化设计以转子壳体
‑
制动盘系统为研究对象,如图2所示,以制动工况作为拓扑优化有限元模型,完成拓扑优化前期准备工作。
[0052]
拓扑优化是基于仿真分析工况,在给定设计空间内,按照需求建立优化数学模型,确定最佳材料分布形式,得到质量最轻的设计。本实施例中,通过拓扑优化变密度法构建转子壳体拓扑优化模型。
[0053]
变密度法将仿真模型设计空间内每个单元的“单元密度”看作设计变量,该值在0
‑
1之间,且认为“单元密度”与材料参数存在函数关系,最后变成材料最佳分布问题。考虑体积为约束和结构柔度为目标的变密度法优化数学模型为:
[0054]
x={x1,x2,...,x
i
}i=1,2,...,n
[0055]
min c(x)=f
t
d=d
t
kd
[0056][0057]
式中,x为设计变量集,n为设计变量的个数;c()为目标函数;f为节点作用力,d为节点位移,λ为体积分数,k为刚度矩阵,v
i
为优化后的体积値,v0为初始体积値。
[0058]
simp(solid isotropic material with penalization,固体各向同性材料惩罚模型)变密度法是由mlejnek等提出,其引入惩罚因子、连续设计变量以及中间密度单元,进而转化为连续化问题。借助惩罚因子使单元密度更接近0或1,减少密度值在0和1之间的单元数量。
[0059]
simp模型单元密度可以表示为:
[0060][0061]
单元密度与弹性模量之间关系为:
[0062]
[0063]
式中,x
i
为设计变量即单元密度;e(x
i
)为单元密度x
i
的弹性模量;p为惩罚因子,p>1;e0是原始弹性模量,e
min
为弹性模量下限值,通常取e
min
=e0/1000;当e
min
取值小于e0时,e
min
可以忽略不计,则单元密度与弹性模量之间关系可简化为:
[0064][0065]
simp模型简单易懂,计算效率高,结果收敛好,应用范围广。
[0066]
本实施例中,构建了以体积分数为约束、结构柔度最小为目标和以疲劳寿命为约束、质量最小为目标的两种转子壳体拓扑优化模型。
[0067]
方案一:将转子壳体作为优化区域,约束条件为减少30%的体积,优化目标为转子壳体结构柔度最小。按照simp变密度法构建出数学模型如下:
[0068]
ρ(x)={ρ1,ρ2,...,ρ
n
}
t
∈ω
[0069][0070][0071]
式中,ρ(x)为设计变量集,n为设计变量的个数,ω为设计空间;ρ
i
为第i个设计变量,即第i个单元的单元密度;v为体积函数;c为目标函数即柔度;d为节点的位移;k为刚度矩阵;ε为节点的应变;σ为节点的应力;v
l
(x)为体积设定;v0为初始体积値;d
m
(x)为极变形函数。
[0072]
方案二:选择转子壳体区域为优化空间,约束条件为疲劳寿命值高于20万次,基于s
‑
n曲线可将疲劳寿命约束转化为应力值约束,优化目标为转子壳体整体质量最小。基于simp变密度法构建出数学模型如下:
[0073]
ρ(x)={ρ1,ρ2,...,ρ
n
}
t
∈ω
[0074]
min m=ρv
[0075][0076]
式中,ρ(x)为设计变量集,n为设计变量的个数;ρ
i
为第i个设计变量,即第i个单元的单元密度;ρ为设计变量即单元密度;v为体积函数;m为目标函数即质量;σ
l
(x)为应力设定;[σ]为应力限值;d
m
(x)为极变形函数。
[0077]
方案一在经过18次迭代后得到转子壳体拓扑优化密度云图,如图3(a)、图3(b)所示。方案二在经过11次迭代后得到的转子壳体拓扑优化密度云图如图4(a)、图4(b)所示。
[0078]
在拓扑优化密度云图中,密度值大于1的区域,材料需要保留;密度值小于0.01的区域,对应材料可以删去。处于密度值在0.01到1之间的过渡区域,表示不需要改进,过渡区域越少离散效果越好。
[0079]
由图3(a)、图3(b)、4(a)、图4(b)可知,两种拓扑优化方案的密度云图基本一致。首先,转子壳体底部靠近轮辋区域需要保留。其次,转子壳体左侧区域大部分属于过渡区域,可以稍微改动。最后,转子壳体顶部靠近制动盘区域的密度值较小,可以删去部分材料来改
进结构,这也与制动工况时该区域应力值较小相符合,同时从密度云图看出右侧区域呈现均匀分布的斜支撑结构,支撑角度接近90
°
。
[0080]
由于转子壳体要保证空间的封闭性,所以不能出现镂空结构,可以在右侧区域改造成以90
°
斜支撑结构为主体,左侧加强筋减少,与右侧加强筋形成y形的整体加强筋形式,得到材料的最佳分布形式。
[0081]
s2、基于转子壳体拓扑优化密度云图,获取转子壳体模型的加强筋布置方式,完成转子壳体模型的优化;其中,转子壳体模型的加强筋布置方式为y形加强筋;
[0082]
对转子壳体进行拓扑优化分析后,对转子壳体模型进行优化。将转子壳体右侧区域(靠近制动盘)加强筋设计成斜支撑结构,减少左侧的加强筋数目,与斜支撑结构一起组成y形加强筋,均匀布置在转子壳体表面,完成转子壳体新结构模型,如图5所示。
[0083]
通过拓扑优化方法对转子壳体模型进行优化后,以制动工况为依据,对优化后的转子壳体模型进行静态特性分析,最大位移为1.498mm,应力最大值为155.2mpa。优化前转子壳体模型的最大位移为1.657mm,应力最大值为163mpa,同优化前相比,拓扑优化后新结构的位移和应力值均降低,同时质量由4.32kg减少至4.27kg。虽然拓扑优化后结构减重效果不显著,但是转子壳体的相关性能都得到了提高。
[0084]
s3、基于优化后的转子壳体模型,获取影响转子壳体的相关参数,并采用正交实验法对影响转子壳体的相关参数进行优化设计,获取转子壳体的最佳设计方案;
[0085]
由于拓扑优化只是改变了加强筋布置形式,减重效果不理想,因此,需要在此基础上进一步优化设计。考虑到影响转子壳体质量、应力及位移的因素较多,且无法确定某一因素起决定性作用,因此需要对多种因素共同考虑,最终在实际条件允许的情况下,制定出转子壳体最合理且可行的优化方案。
[0086]
该步骤具体实现方法如下:
[0087]
首先,基于影响转子壳体的相关参数进行转子壳体正交试验,并获取转子壳体正交试验中各方案的试验结果;
[0088]
本实施例中,通过正交试验法对影响转子壳体的相关参数进行优化设计,通过调整转子壳体结构尺寸参数,使得转子壳体的强度和刚度满足使用要求,同时实现转子壳体轻量化的目的。正交试验过程中,确定转子壳体质量、应力及位移为试验指标,确定y形加强筋的宽度、y形加强筋的厚度变化量以及无加强筋处的厚度变化量为试验因素,每一个因素选取三个水平,并使用l9(33)正交实验表,如表1所示:
[0089]
表1
[0090][0091]
表1中,正交试验表的三因素分别用a、b、c表示,a表示转子壳体y形加强筋宽度,b表示y形加强筋厚度变化量,c为无加强筋处厚度变化量。正交因素水平表,如表2所示。
[0092]
表2
[0093][0094]
表2中,b2、c1对应的0mm表示原始尺寸,b3表示在原始尺寸上增加厚度0.5mm,b1表示在原始尺寸上减少厚度0.5mm,c2表示在初始厚度基础上减少1mm,c3表示在初始厚度基础上减少2mm。a1、a2、a3分别对应y形加强筋宽度值为4mm、6mm及8mm。
[0095]
根据不同正交试验方案参数,建立相应的转子壳体三维模型,按照优化前的制动工况边界条件对试验方案模型进行加载,完成转子壳体仿真分析,得到9种正交试验方案下对应的转子壳体质量、最大应力与最大位移值,如表3所示。
[0096]
表3
[0097][0098]
表3中,方案3质量最轻,应力比优化前降低,位移值增加;方案4应力最低,减重效果不明显;方案2位移最低,但应力与质量降低不明显。
[0099]
其次,基于转子壳体正交试验中各方案的试验结果,采用极差分析法获取影响转子壳体的各相关参数的主次关系;
[0100]
极差表示水平因素波动,对应试验指标的变化程度;如果某一因素该值最大,表示该因素对指标影响最明显。由此,确定各因素对转子壳体质量、应力及位移的影响主次顺序。
[0101]
对正交试验指标质量、应力及位移分别进行极差分析,分析结果分别如表4、表5及表6所示。
[0102]
表4
[0103]
[0104]
表5
[0105][0106]
表6
[0107][0108]
表4、表5及表6中,k1、k2、k3分别为第一次、第二次、第三次试验中对应因素的指标值之和;e1、e2、e3分别为第一次、第二次、第三次试验中该因素的指标值的均值。从上述表4、表5及表6中可以看出,对质量的影响因素主次关系为c、a、b,最佳水平组合为c3a1b1。对应力的影响因素主次关系为c、b、a,最佳水平组合为c2b1a3。对位移的影响因素主次关系为c、a、b,最佳水平组合为c1a2b2。综合考虑三个指标,因素c的影响比较大,即无加强筋处厚度变化值对质量、应力及位移的影响占主要地位。因素b对应力的影响较大,对质量、位移影响最低。因素a对质量与位移影响较大,对应力影响最低。
[0109]
再次,基于影响转子壳体的各相关参数的主次关系对步骤s2中优化后的转子壳体模型进行更新,并通过试验仿真得到转子壳体的最佳设计方案。
[0110]
本实施例中,按照三个最佳水平组合建立转子壳体模型,进行制动工况仿真分析,得到三个试验指标结果,如表7所示,优化组合1对应质量最佳水平组合,优化组合2对应应力最佳水平组合,优化组合3对应位移最佳水平组合。
[0111]
表7
[0112][0113]
从表7中看出优化组合1质量降低效果最显著,同时应力也下降,但是位移有所增加;优化组合2位移与优化前基本一致,质量与应力都减少,但是减少幅度比优化组合1低;优化组合3虽然应力与位移降低幅度最大,但是质量与优化前差异很小。
[0114]
以轻量化为目的,综合考虑三个指标,选择优化组合1作为最优组合,将该组合作为最终的轻量化方案,对应转子壳体减重14.05%。
[0115]
s4、基于转子壳体的最佳设计方案,对转子壳体进行性能评估;
[0116]
通过步骤s1
‑
s3拓扑优化变密度方法,在转子壳体表面布置y形加强筋;结合正交试验设计方法,调整y形加强筋的宽度与厚度、无加强筋处的厚度,以极差分析法为依据,综合考虑三个试验指标,最终选择y形的加强筋宽度为4mm,加强筋厚度减薄0.5mm,无加强筋处厚度减薄2mm的轻量化方案。此时,转子壳体质量为3.713kg,减重14.05%,如图6所示。为进一步验证轻量化对转子壳体的性能影响,本实施例分别通过静态特性验证、动态特性验证、疲劳耐久性验证三个方法对轻量化后的转子壳体进行性能评估。
[0117]
静态特性验证:通过对轻量化后的转子壳体进行静态特性分析,得到轻量化后的转子壳体的最大应力为152.3mpa,较优化前有所降低;位移与原始结构相比有所增加,但变化幅度不大,在可接受的范围内,证明轻量化后的转子壳体强度与刚度均符合要求。
[0118]
动态特性验证:将轻量化前后转子壳体的动态特性进行对比,结果如图7所示;由图7可知,轻量化后的转子壳体与优化前转子壳体模态振型基本保持一致;优化前后模态频率变化不大,趋势相同。轻量化后转子壳体一阶模态频率为217.2hz,仍然低于轮毂电机振动频率与路面激励。因此,轻量化后转子壳体在动态特性方面符合设计和使用要求。
[0119]
疲劳耐久性验证:综合载荷时间历程数据、s
‑
n曲线及仿真分析结果,对轻量化前后转子壳体在全循环制动载荷下产生的疲劳损伤进行计算,计算流程如图8所示。
[0120]
按照图8中的分析流程和仿真分析结果,对优化前后转子壳体的最大应力部位进行损伤计算。对制动载荷进行雨流计数处理,划分为16级,如图9所示。
[0121]
对不同载荷等级下的损伤进行计算,如图10所示,图10中每个载荷等级下左边的柱子为轻量化前的损伤值,右边的柱子为轻量化后的损伤值,轻量化后转子壳体各级载荷产生损伤均低于优化前产生的损伤,第15级载荷产生的损伤最大,对应最大载荷为2851.5n,最小载荷为34.1n;轻量化后产生的总损伤相比优化前有所降低,对应疲劳寿命增加。轻量化后的转子壳体在疲劳耐久性方面满足要求。
[0122]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。