1.本技术涉及交流旋转机的控制装置及交流旋转机的控制方法。
背景技术:
2.作为不使用位置传感器地对交流旋转机的转子位置进行检测的方法,已知除了对交流旋转机的旋转进行控制的电压以外,还施加用于对转子相位进行检测的高频电压而对旋转机的位置进行检测的方法(例如,专利文献1)。在该方法中,使用旋转机的电感相对于转子的一个周期而以2倍周期的正弦波状进行变化的电感的凸极性,进行旋转机的磁极位置的检测。
3.在专利文献1中公开了以下内容,即,从由电流传感器检测到的各相的电流,使用高通滤波器等而提取各相的高频电流,输出用于使三相高频电流与高频目标电流一致的三相高频电力指令。然后,根据该三相高频电力指令的空间矢量而对磁极位置进行计算。
4.专利文献1:日本专利第3882728号公报
技术实现要素:
5.在专利文献1中,为了对磁极位置进行计算,通过电流传感器对各相的电流进行检测,但如果产生旋转机的制造波动,则由于制造误差,各相的电感的波动变大,电感无法成为理想的正弦波状的特性。因此,最终的磁极位置的检测精度下降,进而,旋转机的位置控制时的定位精度下降。
6.本技术公开了用于解决上述这样的课题的技术,其目的在于得到使位置控制时的磁极位置的检测精度提高的交流电动机的控制装置。
7.本技术所公开的交流旋转机的控制装置具有:控制单元,其生成对旋转机进行驱动的基波电压指令,并且生成用于对所述旋转机的转子的磁极位置进行推定的高频电压指令,使用所述基波电压指令以及所述高频电压指令对电压指令进行运算;电压施加单元,其基于所述电压指令对所述旋转机施加电压;电流检测单元,其检测出所述旋转机的各相的电流;磁极位置运算单元,其从所述检测出的旋转机的电流提取各相的高频电流,对所述磁极位置的推定位置进行运算;以及不平衡调整器,其赋予基于所述各相的旋转机常数的增益,对各相间的高频电流的不平衡进行调整,所述磁极位置运算单元使用调整了所述不平衡的高频电流对所述旋转机的转子的磁极的推定位置进行运算。
8.发明的效果
9.根据本技术所公开的交流旋转机的控制装置,通过对所述三相电流检测值赋予对所述不平衡进行校正的增益,从而校正电流不平衡。由此,能够提高位置推定精度,定位精度也提高。
附图说明
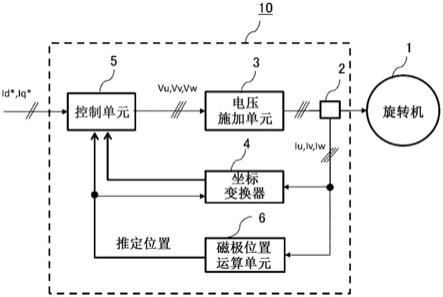
10.图1是表示实施方式1涉及的旋转机的控制装置的结构的框图。
11.图2是表示实施方式1涉及的控制单元的结构的框图。
12.图3是表示实施方式1涉及的磁极位置运算单元的结构的框图。
13.图4是表示实施方式1涉及的高频成分提取部的结构的框图。
14.图5是对实施方式1涉及的转子磁通矢量进行说明的图。
15.图6是对实施方式1涉及的磁极位置运算器进行说明的框图。
16.图7是表示对实施方式1涉及的实际磁极位置与位置指令之间的差值(位置误差)进行说明的对比例的图。
17.图8是说明使用实施方式1涉及的高频电流的不平衡校正而进行了无传感器位置控制的情况下的位置误差的图。
18.图9是表示旋转机系统的硬件结构的框图,该旋转机系统包含实施方式1涉及的旋转机的控制装置。
19.图10是表示实施方式2涉及的控制单元的结构的框图。
20.图11是对实施方式3涉及的滤波器系数取得流程进行说明的框图,是采用了实施方式1的结构的情况下的框图。
21.图12是对实施方式3涉及的滤波器系数取得流程进行说明的框图,是采用了实施方式2的结构的情况下的框图。
具体实施方式
22.以下,参照附图,对实施方式进行说明。此外,各图中,相同标号表示相同或者相当的部分。
23.实施方式1.
24.使用附图,对实施方式1涉及的旋转机的控制装置进行说明。图1是表示实施方式1涉及的旋转机的控制装置的结构的图。后面,基于该结构图对各结构部的动作详细进行说明。
25.旋转机1是指交流旋转机即同步机,在本实施方式中是使用了永磁铁的同步机。此外,在本实施方式中,作为旋转机,通过以使用了永磁铁的同步机为例的结构而进行说明,但也可以是磁阻电动机等同步机。能够通过与本实施方式相同的结构,使用后述的不平衡调整器62等对高频电流的不平衡进行校正。
26.控制装置10具有:电流检测单元2,其与旋转机1连接,对流过旋转机1的旋转机电流(三相的电流矢量)进行检测;电压施加单元3,其由逆变器电路等电力变换器构成,基于从控制单元5输出的电压指令而对旋转机1施加电压;磁极位置运算单元6,其使用由电流检测单元2检测到的检测电流矢量而对磁极位置进行运算;以及坐标变换器4,其将由电流检测单元2检测到的检测电流矢量,使用由磁极位置运算单元6计算出的磁极位置的推定位置而进行坐标变换,输出至控制单元5。
27.以下,对控制装置10的各结构部详细进行说明。
28.电流检测单元2对旋转机1的三相检测电流矢量(iu,iv,iw)进行检测。
29.坐标变换器4将由电流检测单元2检测到的三相检测电流矢量(iu,iv,iw),使用从后述的磁极位置运算单元6输出的推定位置而坐标变换为dq轴上的电流,将其作为检测电流矢量(ids,iqs)而输出。此外,dq轴是将三相(uvw)轴的静止坐标变换为与旋转机的转子
同步地旋转的正交坐标而得到的,是公知的。
30.此外,就三相检测电流矢量而言,除了对电流在三相上都进行检测以外,也可以对两相进行检测,利用三相电流之和为零这一情况而进行计算。并且,也可以根据电压施加单元3即逆变器的母线电流、流过构成逆变器的开关元件的电流以及开关元件的状态等,对三相检测电流矢量进行运算而取得三相检测电流矢量。
31.图2是表示控制单元5的结构的图。在图2中,控制单元5具有电流控制器51、高频电压指令生成器52、坐标变换器53、加法器54以及加减法器55。
32.加减法器55从电流指令矢量(id*,iq*)减去检测电流矢量(ids,iqs)而对电流偏差进行运算、输出。
33.电流控制器51通过pi控制而输出基波电压指令矢量(vdf,vqf),以使得从加减法器55输入的电流偏差为0。该基波电压指令矢量是同步机的旋转动作的驱动指令。
34.高频电压指令生成器52生成d轴以及q轴的高频电压指令矢量(vdh,vqh)。与基波电压指令矢量的频率相比,该高频电压指令矢量的频率更高。
35.加法器54输出将基波电压指令矢量(vdf,vqf)和高频电压指令矢量(vdh,vqh)相加后的电压指令(vd*,vq*)。
36.坐标变换器53使用从磁极位置运算单元6输出的推定位置,将加法器54的输出即(vd*,vq*)从dq轴变换为静止坐标的电压指令矢量(vu,vv,vw)而输出。
37.接下来,对磁极位置运算单元6的动作进行叙述。
38.图3是表示磁极位置运算单元6的结构的图。在图3中,磁极位置运算单元6具有高频成分提取部61、不平衡调整器62以及磁极位置运算器63。
39.由电流检测单元2检测到的三相检测电流矢量(iu,iv,iw)被输入至高频成分提取部61,提取各相的高频成分,输出各相的高频电流矢量(iuh,ivh,iwh)。
40.不平衡调整器62具有与各相对应的滤波器621、622、623,对各相的高频电流矢量(iuh,ivh,iwh)的电流不平衡进行校正。
41.磁极位置运算器63使用校正后的高频电流矢量而对磁极位置的推定位置进行运算。
42.此外,该各相高频电流的不平衡是由于以下情况而产生的,即,由于旋转机的制造误差,uvw各相的电感值存在差异。在没有该差异的情况下,被换算至dq轴上的d轴电感ld、q轴电感lq与转子位置无关地具有恒定的值。但是,在该差异大的情况下,d轴电感ld、q轴电感lq分别相对于转子的一个周期而变形为2倍周期的正弦波状。由此,位置推定精度下降。因此,如本实施方式所示,通过提供针对各相的高频电流而分别对不平衡进行校正的滤波器,从而能够防止位置推定精度的下降。
43.图4示出高频成分提取部61的控制框图。高频成分提取部61使用滤波器611而从检测电流矢量(iu,iv,iw)提取高频电流矢量(iuh,ivh,iwh)。就滤波器611而言,只要能够从检测电流矢量提取与高频电压矢量相同的频率成分,可以使用任意滤波器。例如,只要利用公知的陷波滤波器作为窄频带的带阻滤波器而提取高频电流矢量即可。
44.以将陷波滤波器用作图4的滤波器611的例子,对高频成分提取部61的动作进行说明。此外,陷波滤波器(滤波器611)由下式(1)表示,通过该滤波器而将高频电压矢量的角频率ωh去除。对被输入至高频成分提取部61的检测电流矢量(iu,iv,iw)应用陷波滤波器(滤
波器611),将角频率ωh成分去除。在加减法器612中,通过从检测电流矢量(iu,iv,iw)减去滤波器611的输出,从而根据检测电流矢量(iu,iv,iw)对角频率ωh成分的高频电流矢量(iuh,ivh,iwh)进行运算。此外,在式(1)中,s是拉普拉斯运算符,qx是陷波的深度。
45.【式1】
[0046][0047]
此外,由在图2中说明过的高频电压指令生成器52生成的高频电压指令矢量能够如式(2)所示,作为高频旋转电压矢量而进行表示。
[0048]
【式2】
[0049][0050]
此外,在上式(2)中,设为高频旋转电压矢量,但也可以在式(2)中,在式(2-1)中设为vqh=0,设为仅在d轴方向上交变的电压矢量。此外,在本实施方式1中,在高频电压指令生成器52中,使用仅在d轴方向上交变的电压矢量。
[0051]
如前面所述,由于由制造波动等引起的uvw各相的电感值的波动,uvw各相的高频电流变得不平衡。因此,由高频成分提取部61提取出的高频电流矢量(iuh,ivh,iwh)的uvw各相的高频电流变得不平衡。在图3中示出的不平衡调整器62所具有的滤波器621、622、623针对由高频成分提取部61提取出的高频电流矢量(iuh,ivh,iwh)而对uvw各相间的高频电流的差异进行校正。
[0052]
接下来,对滤波器621的值gu、622的值gv、623的值gw进行说明。
[0053]
首先,在使旋转机1的转子n极与uvw相各相的相位一致的状态下,施加了仅在d轴方向上交变的电压矢量时的各相的高频电流振幅能够如式(3)所示进行表示。此外,在以后的式子的记载中,上标文字表示在转子n极的相位与各相的方向一致的状态下测定出的值。
[0054]
【式3】
[0055][0056]
其中,
[0057]
r
u
、r
v
、r
w
是使旋转机的转子n极的相位与uvw相各相一致时的电阻值,
[0058]
是使旋转机的转子n极的相位与uvw相各相一致时的电感,
[0059]
s:拉普拉斯运算符。
[0060]
此外,这里是以dq坐标系中的电感考虑的,但也可以使用三相的静止坐标系的电感构成滤波器。
[0061]
使用由式(3)表示的各相的高频电流振幅,取与某个成为基准的电流振幅之比,其倒数是针对各相的校正增益,将其设为赋予给各相的滤波器的值。此外,成为基准的相可以是任意的相,但这里,式(4)表示将所检测的旋转机的高频电流振幅中的u相高频电流振幅设为基准的情况下的滤波器621的值gu,式(5)表示该情况下的滤波器622的值gv,式(6)表示该情况下的滤波器623的值gw。
[0062]
【式4】
[0063][0064]
【式5】
[0065][0066]
【式6】
[0067][0068]
此外,在高频电压指令生成器52所生成的高频电压指令矢量的角速度足够大,r<<sl成立的情况下,能够忽略旋转机的定子电阻的影响。式(7)表示该情况下的滤波器621的值gu,式(8)表示该情况下的滤波器622的值gv,式(9)表示该情况下的滤波器623的值gw。这里,滤波器621、622、623的值是比例常数,通过将某个相设为基准,向成为基准相的高频电流应用的滤波器由1倍表示,能够实现抑制计算机的计算量的结构。此外,也可以省略向成为基准相的高频电流应用的滤波器。
[0069]
【式7】
[0070][0071]
【式8】
[0072][0073]
【式9】
[0074][0075]
对滤波器621、622、623设定的值可以是式(4)、式(5)、式(6)或者式(7)、式(8)、式(9)的任一者。向高频电流矢量(iuh,ivh,iwh)分别应用滤波器621、622、623得到的值,即乘以校正增益得到的值是高频校正电流矢量(iuh_flt,ivh_flt,iwh_flt)。
[0076]
接下来,对磁极位置运算器63进行说明。磁极位置运算器63基于校正后的各高频电流矢量和预先存储的旋转机常数(定子电阻r、定子电感l等)而对旋转机1的推定磁极位置θ0进行计算。
[0077]
首先,对旋转机1的推定磁极位置θ0的计算方法进行说明。图5是表示实施方式1涉及的转子磁通以及电压指令矢量的施加方向的图。在图5中,将转子的磁通矢量方向设为dm轴,将其正交方向设为qm轴,将通过施加高频交变电压矢量而得到的推定磁极位置θ0所示的方向设为d轴,将其正交方向设为q轴,设为在d轴与dm轴之间存在δθ的偏差。
[0078]
就根据通过施加高频电压而得到的高频电流,对转子磁通矢量的方向(dm轴)与推定磁极位置θ0所示的方向(d轴)之间的偏差即δθ进行运算而言,只要基于例如日本专利第6104021号公报所记载的方法,使用下述的式(10)进行即可。但是,在本实施方式中,取代公知文献的“q轴高频电流振幅”,使用通过不平衡调整器62进行校正后的高频校正电流振幅对“高频q轴校正电流振幅”进行计算,使用“高频q轴校正电流振幅”对δθ进行计算。
[0079]
【式10】
[0080][0081]
其中,
[0082][0083]
l
d
是dm轴方向的电感,
[0084]
l
q
是qm轴方向的电感,
[0085]
|i
qh_flt
|是q轴高频校正电流振幅。
[0086]
此外,在式(10)中,由于高频电压的角频率ωh和高频电压振幅vh能够由高频电压指令生成器52任意地设定,因此是已知的,l以及l是能够通过ld、lq求出的,因而是已知的,其中,ld、lq能够通过事先测定而获得。另外,后述的积分器634以δθ接近零的方式稳定地进行动作,因此,2δθ≈0,所以,能够近似为sin2δθ≈2δθ。因此,从式(10)推导出下式(11)。
[0087]
【式11】
[0088][0089]
图6是表示磁极位置运算器63的结构的图。在图中,磁极位置运算器63具有坐标变
换器631、交变电流振幅提取部632、磁极偏差运算器633以及积分器634。
[0090]
首先,在坐标变换器631中,将不平衡调整器62的输出即高频校正电流矢量(iuh_flt,ivh_flt,iwh_flt),使用从磁极位置运算单元6输出的推定位置而坐标变换为dq轴上的电流,将其作为高频校正电流矢量(idh_flt,iqh_flt)而输出。
[0091]
接下来,在交变电流振幅提取部632中,根据从坐标变换器631输入的高频校正电流矢量(idh_flt,iqh_flt)的q轴成分iqh_flt,使用下式(12)对振幅|iqh_flt|进行运算。式(12)中的t是iqh_flt的周期。
[0092]
【式12】
[0093][0094]
磁极偏差运算器633使用由交变电流振幅提取部632运算而提取出的振幅|iqh_flt|,利用式(10)或者式(11)的任一者对偏差δθ进行运算。
[0095]
将计算出的偏差δθ通过积分器634进行积分运算,对推定磁极位置θ0进行计算。
[0096]
此外,实施方式1所示的结构只是电流控制系统的结构,但在构建速度控制系统的情况下,通过对推定磁极位置θ0进行微分,从而能够对推定速度ω进行计算,能够通过pi控制器的追加而构成速度控制系统。
[0097]
图7、8是表示在无传感器地对交流旋转机进行位置控制运转的情况下,使旋转机旋转1圈时的实际磁极位置与位置指令之间的差值(位置误差)的图。图7是不使用本实施方式的结构的例子,图8是进行本实施方式1涉及的各相间的高频电流的不平衡校正,通过无传感器位置控制而使旋转机运转的情况下的位置误差。
[0098]
图8是在实施方式1中,通过各相的高频电流的不平衡校正而将各相的电流的不平衡减小了大约5%的情况下的结果,但与图7相比,可知定位的误差从2减小至0.2[deg],减小了大约90%。
[0099]
如上所述,根据本实施方式1,在磁极位置运算单元6中,使用各相的高频电流振幅而赋予对各相间的高频电流的不平衡进行校正的增益,由此各相间的电流不平衡减小,旋转机的磁极位置的检测精度提高。另外,基于如此求出的磁极的推定位置而对交流旋转机进行控制,由此即使是不使用位置传感器的旋转机的位置控制运转,也能够提高定位精度。
[0100]
此外,图9示出旋转机系统的硬件结构,该旋转机系统具有上述实施方式1涉及的交流旋转机1的控制装置10。
[0101]
如图9所示,旋转机系统具有旋转机1、旋转机1的控制装置10以及对控制装置10提供指令的上级的控制器13,该旋转机系统对旋转机1进行驱动。作为硬件结构,控制装置10具有处理器11、存储装置12、电流检测单元2以及电压施加单元3。
[0102]
在图1中示出的控制单元5、坐标变换器4、磁极位置运算单元6由执行在存储装置12存储的程序的处理器11实现。
[0103]
尽管未图示,但存储装置12具有随机存取存储器等易失性存储装置和闪存等非易失性的辅助存储装置。也可以取代非易失性的辅助存储装置而具有硬盘等辅助存储装置。
[0104]
从存储装置12的辅助存储装置经由易失性存储装置而向处理器11输入程序,处理器11执行从存储装置12输入的程序。另外,处理器11将运算结果等数据向存储装置12的易
失性存储装置输出,或者经由易失性存储装置而向辅助存储装置输出,对数据进行保存。
[0105]
此外,控制单元5、坐标变换器4、磁极位置运算单元6也可以由系统lsi等处理电路实现。
[0106]
另外,坐标变换器4以及将向电压施加单元3的电压指令vd*、vq*变换为三相电压指令的功能也可以由处理器11或者系统lsi等处理电路实现。并且,也可以是多个处理器11以及多个存储装置12协同地执行上述功能,也可以是多个处理电路协同地执行上述功能。另外,也可以将它们进行组合而执行上述功能。
[0107]
实施方式2.
[0108]
在上述实施方式1中,示出通过在磁极位置运算单元6中对高频电流赋予增益(设置滤波器),从而直接地进行电流不平衡的校正的方法。在本实施方式2中,对以下方法进行说明,即,不对检测电流进行校正,而是通过对由控制单元5叠加的高频电压指令矢量应用校正滤波器而进行高频电流矢量(iuh,ivh,iwh)的不平衡的校正。在实施方式1的图1所示的旋转机的控制装置的结构图中,将控制单元5设为图10中示出的结构。除此以外的结构与实施方式相同,省略说明。
[0109]
图10是表示实施方式2涉及的旋转机的控制装置中的控制单元5的结构的框图。在图中,控制单元5具有电流控制器51、高频电压指令生成器52、坐标变换器53、不平衡调整器56、加减法器55以及加法器57、58、59。另外,高频电压指令生成器52具有坐标变换器522,不平衡调整器56具有滤波器561、562、563。
[0110]
坐标变换器522将高频电压指令矢量(vdh*,vqh*)从dq轴变换为静止坐标的高频电压指令矢量(vuh*,vvh*,vwh*)而输出。
[0111]
输入至不平衡调整器56的高频电压指令矢量(vuh*,vvh*,vwh*)被进行不平衡校正,变换为高频校正电压指令矢量(vuh_flt*,vvh_flt*,vwh_flt*)。
[0112]
另一方面,加减法器55从电流指令矢量(id*,iq*)减去检测电流矢量(ids,iqs)而对电流偏差进行运算、输出。
[0113]
电流控制器51通过pi控制而输出基波电压指令矢量(vdf,vqf),以使得从加减法器55输入的电流偏差为0。
[0114]
坐标变换器53使用从磁极位置运算单元6输出的推定位置,将电流控制器51的输出即基波电压指令矢量(vdf,vqf)从dq轴变换为静止坐标的基波电压指令矢量(vuf,vvf,vwf)而输出。
[0115]
加法器57、58、59分别对基波电压指令矢量(vuf,vvf,vwf)进行加法运算,对不平衡调整器56的输出即高频校正电压指令矢量(vuh_flt*,vvh_flt*,vwh_flt*)进行加法运算,由此,将高频成分被校正后的静止坐标的各相电压指令矢量输出。
[0116]
参照图1,如上所述,基于从控制单元5输出的高频成分被校正后的静止坐标的各相电压指令矢量,从电压施加单元3对旋转机1施加电压,由电流检测单元2检测uvw各相的电流。此时,各相电压指令矢量被预先校正了高频成分,因此,抑制了各相的电流的不平衡。其结果,能够由磁极位置运算单元对高精度的磁极位置进行运算。
[0117]
接下来,对不平衡调整器56中的校正处理进行说明。
[0118]
由于在uvw各相的电感值之间产生的不平衡,在高频电流矢量(iuh,ivh,iwh)的各相间产生差异(不平衡)。不平衡调整器56的滤波器561、562、563具有如下功能,即,针对向
电压施加单元3输出的电压指令矢量进行高频电压指令矢量(vuh*,vvh*,vwh*)的校正,以使得该高频电流矢量(iuh,ivh,iwh)不产生不平衡。
[0119]
此外,这里考虑的是高频电压指令生成器52所生成的高频电压指令矢量的角速度足够大,r<<sl成立的情况。在该情况下,能够忽略定子绕组电阻值,但也可以考虑到其影响,与实施方式1同样地,构成包含定子绕组相电阻值的滤波器。
[0120]
对滤波器561的值gu、562的值gv、563的值gw进行说明。
[0121]
首先,在使旋转机1的转子n极的相位与uvw相各相一致的状态下,施加了高频交变电压时的各相的高频电压振幅能够如下式(13)所示进行表示。
[0122]
【式13】
[0123][0124]
其中,
[0125][0126]
使用由式(13)表示的各相的高频电压振幅,取与某个成为基准的相的高频电压振幅之比,将其倒数设为赋予给各相的增益,设为滤波器的值。此外,成为基准的相可以是任意的相,但这里,式(14)表示将u相高频电压振幅取作基准的情况下的滤波器561的值gu,式(15)表示该情况下的滤波器562的值gv,式(16)表示该情况下的滤波器563的值gw。
[0127]
【式14】
[0128][0129]
【式15】
[0130][0131]
【式16】
[0132][0133]
通过应用这样设定的滤波器561、562、563,从而高频电压指令矢量(vuh*,vvh*,vwh*)被进行不平衡校正,输出高频校正电压指令矢量(vuh_flt*,vvh_flt*,vwh_flt*)。通过由控制单元5输出考虑了该高频校正电压指令矢量(vuh_flt*,vvh_flt*,vwh_flt*)的电压指令矢量,从而高频电流矢量(iuh,ivh,iwh)的各相间的不平衡得到抑制,磁极位置检测
的精度提高。
[0134]
此外,在本实施方式中,实施方式1的在图3中示出的磁极位置运算单元6所具有的不平衡调整器62的滤波器621、622、623也可以分别设为1倍,在不平衡调整器62中不进行校正。但是,为了进一步提高电流的不平衡调整的精度,也可以对不平衡调整器56以及不平衡调整器62这两者进行设定。
[0135]
如上所述,根据本实施方式2,在控制单元5中使用各相的高频电压振幅进行高频电压指令的校正,由此,对在高频电流矢量产生的各相间的不平衡进行校正,因而各相间的电流不平衡减小,旋转机的磁极位置的检测精度提高。另外,通过基于如此求出的磁极的推定位置对交流旋转机进行控制,从而即使是不使用位置传感器的旋转机的位置控制运转,也能够提高定位精度。
[0136]
实施方式3.
[0137]
在实施方式3中,对实施方式1与实施方式2中的不平衡调整器内的滤波器系数的取得流程进行说明。
[0138]
图11是表示对实施方式1的结构、即磁极位置运算单元6的不平衡调整器62的滤波器621、622、623设定系数的情况下的取得流程的流程图。
[0139]
首先,在步骤801中,通过控制单元5在旋转机1的第一磁极位置即相位施加直流电流,使转子的n极转动至第一磁极位置。在转动动作结束之后,通过控制单元5对旋转机1施加高频交变电压或者高频旋转电压,由电流检测单元2测定高频电流的振幅。
[0140]
在步骤802中,通过控制单元5在旋转机1的第二磁极位置即相位施加直流电流,使转子的n极转动至第二磁极位置。在转动动作结束之后,通过控制单元5对旋转机1施加高频交变电压或者高频旋转电压,由电流检测单元2测定高频电流的振幅。
[0141]
在步骤803中,通过控制单元5在旋转机1的第三磁极位置即相位施加直流电流,使转子的n极转动至第三磁极位置。在转动动作结束之后,通过控制单元5对旋转机1施加高频交变电压或者高频旋转电压,由电流检测单元2测定高频电流的振幅。
[0142]
步骤801至步骤803的动作仅磁极位置不同,是相同的动作。另外,第一磁极位置、第二磁极位置、第三磁极位置分别是uvw相中的某相的相位的位置,测定也可以顺序不同。
[0143]
另外,从事先决定的第一磁极位置依次进行高频电流振幅的测定,但也可以测定图11的取得流程进行动作的时间点的旋转机转子位置,从最近的测定点的相开始。例如,也可以在流程开始时的初始转子位置接近v相的情况下,从v相起开始测定等,从距离当前的转子位置最近的测定点开始执行取得流程。
[0144]
在接下来的步骤804中,使用在步骤801至步骤803中取得的高频电流振幅进行式(7)、式(8)、式(9)的计算。在运算完成之后,将值设定给不平衡调整器62所具有的各滤波器621、622、623。
[0145]
接下来,使用图12,对将系数设定给实施方式2的结构、即控制单元5的不平衡调整器56的滤波器561、562、563的情况下的取得流程进行说明。
[0146]
但是,在取得不平衡调整器56的滤波器561、562、563的系数的流程中,控制单元5使用图2所示的控制结构。此时,高频电压指令生成器52具有加减法器和控制器,加减法器将基于从高频电流振幅指令矢量(|idh*|,0)检测到的高频电流矢量(idh,0)计算出的高频电流振幅矢量(|idh|,0)减去,对振幅偏差进行运算、输出。控制器以使得从加减法器输入
的振幅偏差为0的方式进行控制,对高频电压振幅vh进行运算,输出高频电压矢量(vdh,0)。此外,高频电流振幅指令可以设定为任意的值,例如可以预先设定为旋转机额定电流的5%等。
[0147]
图12是表示控制单元5的不平衡调整器56的各滤波器的系数的取得流程的流程图。
[0148]
首先,在步骤901中,通过控制单元5在旋转机1的第一磁极位置即相位施加直流电流,使转子的n极转动至第一磁极位置。在转动动作结束之后,控制单元5生成使得高频电流振幅与高频电流振幅指令一致这样的高频电压振幅,取得第一磁极位置的高频电压振幅。另外,关于高频电压振幅,只要与使用式(12)从q轴成分iqh_flt提取振幅|iqh_flt|的情况同样地进行计算即可。
[0149]
在步骤902中,通过控制单元5在旋转机1的第二磁极位置即相位施加直流电流,使转子的n极转动至第二磁极位置。在转动动作结束之后,控制单元5生成使得高频电流的振幅与高频电流指令一致这样的高频电压的振幅,取得第二磁极位置的高频电压振幅。
[0150]
在步骤903中,通过控制单元5在旋转机1的第三磁极位置即相位施加直流电流,使转子的n极转动至第三磁极位置。在转动动作结束之后,控制单元5生成使得高频电流的振幅与高频电流指令一致这样的高频电压的振幅,取得第三磁极位置的高频电压振幅。
[0151]
此外,步骤901至步骤903的动作仅磁极位置不同,是相同的动作。另外,第一磁极位置、第二磁极位置、第三磁极位置分别是uvw相中的某相的相位的位置,高频电压振幅的取得也可以顺序不同。
[0152]
另外,从事先决定的第一磁极位置起依次进行高频电流振幅的取得,但也可以测定图12的取得流程进行动作的时间点的旋转机转子位置,从最近的测定点的相起开始。例如,也可以在流程开始时的初始转子位置接近w相的情况下,从w相起开始取得等,从距离当前的转子位置最近的测定点开始执行取得流程。
[0153]
在接下来的步骤904中,使用在步骤901至903中取得的高频电压振幅进行式(14)、式(15)、式(16)的计算。在运算完成之后,将值设定给不平衡调整器56所具有的各滤波器561、562、563。
[0154]
此外,在图11以及图12中,以通过分别对各相的高频电流振幅和高频电压振幅进行测量而设定滤波器值的方式构成滤波器,但也可以通过分别对3个磁极位置处的定子电阻值r、定子电感l进行测量而构成滤波器。
[0155]
首先,对定子电阻值r的测定进行说明,此处是说明对u相的定子电阻值ru进行测定的情况。
[0156]
使旋转机1的转子的n极的相位与u相一致,赋予直流电压指令,此时,通过对流过旋转机的电流进行测定而使用下式(17)进行计算。
[0157]
【式17】
[0158][0159]
其中,
[0160]
是使旋转机的转子n极与u相一致时的d轴电压指令,
[0161]
是使旋转机的转子n极与u相一致时的d轴电流,
[0162]
对于其它相,也能够使旋转机1的转子的n极的相位进行转动,同样地进行测定。
[0163]
接下来,对定子电感l的测定进行说明,此处是说明对使转子n极与u相一致时的电感进行测定的情况。
[0164]
使旋转机1的转子的n极的相位与u相一致,施加使r<<sl成立的高频电压。取得此时的高频电流振幅,使用由上述式(3)导出的下式(18)计算使转子n极与u相一致时的电感。
[0165]
【式18】
[0166][0167]
其中,
[0168]
是使旋转机的转子n极与u相一致时的电感,
[0169]
对于其它相,也能够使旋转机1的转子的n极的相位进行转动,同样地进行测定。
[0170]
如上所述,根据本实施方式3,取得针对旋转机的3个磁极位置的高频电流振幅或者高频电压振幅,计算针对各相的校正的增益。将取得的增益用作滤波器的值,对高频电流的不平衡进行校正,由此抑制电流不平衡,旋转机的磁极位置的检测精度提高。另外,通过基于如此求出的磁极的推定位置对交流旋转机进行控制,从而即使是不使用位置传感器的旋转机的位置控制运转,也能够提高定位精度。
[0171]
实施方式4.
[0172]
在上述的实施方式1至3中,设定给各滤波器的值即校正增益是基于某个成为基准的相的高频电流振幅或者高频电压振幅而进行计算的,构成滤波器,由此进行高频电流的相间不平衡的校正。但是,依赖于成为基准的相的高频电流或者高频电压振幅的检测精度,有可能无法充分地消除相间不平衡。
[0173]
因此,在该实施方式4中,在成为基准的相的计算方法中,通过使用各相的高频电流振幅或者高频电压振幅的平均值,从而实现基于校正的更进一步的精度提高。
[0174]
首先,说明对实施方式1中的磁极位置运算单元6所具有的不平衡调整器62的滤波器的值进行设定的情况。使用下式(19)对取得的旋转机的高频电流振幅的平均值|iave|进行计算。
[0175]
【式19】
[0176][0177]
其中,
[0178]
是使旋转机的转子n极与uvw相各相一致时的d轴高频电流振幅,
[0179]
此外,各相的高频电流振幅只要使用式(12)与从q轴成分iqh_flt提取振幅|iqh_flt|的情况同样地进行计算即可。
[0180]
在将成为基准的电流的振幅设为高频电流振幅的平均值|iave|的情况下,式(4)、式(5)、式(6)能够如下所示进行改写,式(20)表示不平衡调整器62的滤波器621的值gu,式
(21)表示滤波器622的值gv,式(22)表示滤波器623的值gw。
[0181]
【式20】
[0182][0183]
【式21】
[0184][0185]
【式22】
[0186][0187]
接下来,说明对实施方式2中的控制单元5所具有的不平衡调整器56的滤波器的值进行设定的情况。使用下式(23)对测定出的旋转机的高频电压振幅的平均值|vave|进行计算。
[0188]
【式23】
[0189][0190]
其中,
[0191]
是使旋转机的转子n极与uvw相各相一致时的d轴高频电压振幅。
[0192]
在将成为基准的电压的振幅设为高频电压振幅的平均值|vave|的情况下,式(14)、式(15)、式(16)能够如下所示进行改写,式(24)表示滤波器561的值gu,式(25)表示滤波器562的值gv,式(26)表示滤波器563的值gw。
[0193]
【式24】
[0194][0195]
【式25】
[0196][0197]
【式26】
[0198][0199]
如上所述,根据本实施方式4,取得针对3个磁极位置的高频电流振幅或者高频电压振幅,将3个部位的高频电流振幅或者高频电压振幅的平均值设为基准而对校正增益进
行计算,设定滤波器值。由此,不对定子电阻r以及定子电感l等旋转机常数单独地进行测定就能够设定滤波器值,因此能够实现定位精度的提高。另外,与将某1个部位的高频电流振幅或者高频电压振幅设为基准而设定滤波器值的情况相比,能够实现高精度地对旋转机的高频电流的不平衡进行校正,由此提高定位精度。
[0200]
实施方式5.
[0201]
在上述的实施方式中,为了取得各滤波器的滤波器系数,需要测量针对3个磁极位置的高频电流振幅或者高频电压振幅,需要测定时间。在本实施方式5中,将针对磁极位置的测定部位设为1个部位,使测定变得容易。
[0202]
这里,说明在使旋转机的转子n极与u相的相位一致的情况下,将旋转机检测电流的u相电流设为基准而构成滤波器的例子。此外,成为基准的相可以是uvw的任意相。
[0203]
在使旋转机1的转子n极与u相一致的情况下,v相以及w相电流相对于u相电流,iv=-iu/2、iw=-iu/2的关系成立。使用该关系,式(4)、式(5)、式(6)能够如下所示进行改写,式(27)表示不平衡调整器62的滤波器621的值gu,式(28)表示滤波器622的值gv,式(29)表示滤波器623的值gw。
[0204]
【式27】
[0205][0206]
【式28】
[0207][0208]
【式29】
[0209][0210]
其中,
[0211]
是各相的高频电流振幅。
[0212]
此外,各相的高频电流振幅只要使用式(12)与从q轴成分iqh_flt提取振幅|iqh_flt|的情况同样地进行计算即可。
[0213]
如上所述,根据本实施方式5,取得针对3个磁极位置中的1个部位的高频电流振幅,基于此来设定3个相的滤波器值。由此,不对定子电阻r以及定子电感l等旋转机常数单独地进行测定就能够设定滤波器值,因此,高频电流的不平衡校正变得容易。由此,能够对电流不平衡进行校正,旋转机的磁极位置的检测精度提高。另外,通过基于如此求出的磁极的推定位置对交流旋转机进行控制,从而即使是不使用位置传感器的旋转机的位置控制运转,也能够提高定位精度。
[0214]
本技术记载了各种例示性的实施方式以及实施例,但1个或者多个实施方式所记载的各种特征、方式以及功能不限于特定的实施方式的应用,能够单独地或者以各种组合
应用于实施方式。
[0215]
因此,在本技术所公开的技术范围内可想到未例示的无数变形例。例如,包含对至少1个结构要素进行变形的情况、进行追加的情况或者进行省略的情况,以及,提取至少1个结构要素而与其它实施方式的结构要素进行组合的情况。
[0216]
标号的说明
[0217]
1:旋转机,2:电流检测单元,3:电压施加单元,4、53、522、631:坐标变换器,5:控制单元,6:磁极位置运算单元,10:控制装置,11:处理器,12:存储装置,13:控制器,51:电流控制器,52:高频电压指令生成器,55、612:加减法器,54、57、58、59:加法器,56、62:不平衡调整器,61:高频成分提取部,63:磁极位置运算器,561、562、563、621、622、623:滤波器,632:交变电流振幅提取部,633:磁极偏差运算器,611:滤波器,634:积分器
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。