技术特征:
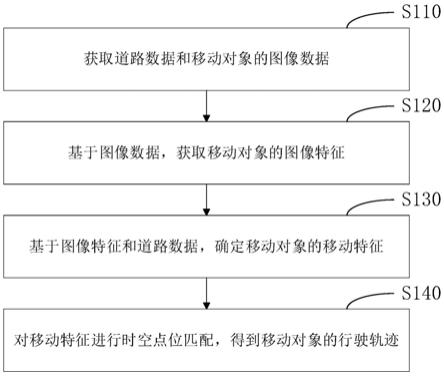
1.一种数据处理方法,包括:获取道路数据和移动对象的图像数据;基于所述图像数据,获取移动对象的图像特征;基于所述图像特征和所述道路数据,确定所述移动对象的移动特征;对所述移动特征进行时空点位匹配,得到所述移动对象的行驶轨迹。2.根据权利要求1所述的方法,其中,所述图像数据包括多个对象图像,每个所述对象图像中包括一个移动对象;其中,所述基于所述图像数据,获取移动对象的图像特征,包括:针对每个所述对象图像,对所述对象图像进行图像分析,得到所述对象图像对应的图像特征。3.根据权利要求2所述的方法,其中,所述对所述对象图像进行图像分析,得到所述对象图像对应的图像特征,包括:获取所述对象图像的时空特征;其中,所述时空特征包括所述对象图像的采集时间和所述对象图像的采集地点;对所述对象图像进行图像识别,得到所述对象图像中的移动对象的对象特征;将所述对象特征和所述时空特征,作为所述对象图像对应的图像特征。4.根据权利要求2所述的方法,其中,所述获取移动对象的图像数据,包括:获取视频数据,所述视频数据包括多个与移动对象相关的视频,每个所述视频由一个图像采集设备采集;针对每个所述视频,对所述视频进行图像截取,得到多个所述对象图像。5.根据权利要求4所述的方法,其中,所述对所述视频进行图像截取,得到多个所述对象图像之后,所述方法还包括:对多个所述对象图像进行去重处理,得到去重后的对象图像。6.根据权利要求2所述的方法,其中,所述基于所述图像特征和所述道路数据,确定所述移动对象的移动特征,包括:利用多个所述对象图像对应的图像特征和所述道路数据,构建每个所述对象图像对应的图结构;基于预设图神经网络对多个所述对象图像对应的图结构进行聚类处理,得到至少一组图结构组;其中,每组所述图结构组作为一个移动对象的移动特征。7.根据权利要求6所述的方法,其特征在于,所述利用多个所述对象图像对应的图像特征和所述道路数据,构建每个所述对象图像对应的图结构,包括:根据所述道路数据,建立城市道路的道路有向图;针对每个所述对象图像,根据所述对象图像的时空特征,将所述对象图像与所述路网有向图进行匹配,得到所述对象图像对应的路网特征;其中,所述时空特征包括所述对象图像的采集时间和所述对象图像的采集地点;根据所述图像特征和所述路网特征,确定每两个所述对象图像的之间的关联特征;根据所述图像特征和所述关联特征,构建每个所述对象图像对应的图结构。8.根据权利要求7所述的方法,其特征在于,所述根据所述道路数据,建立城市道路的道路有向图之前,所述方法还包括:
获取网络交通数据和gps数据;其中,所述gps数据包括所述城市道路上的图像采集设备gps信息和移动对象gps信息中的至少一种;其中,所述根据所述道路数据,建立城市道路的道路有向图,包括:根据所述道路数据、所述网络交通数据和所述gps数据,建立所述道路有向图。9.根据权利要求7所述的方法,其特征在于,所述移动对象包括行驶车辆,所述对象图像包括车辆图像,所述对象特征包括下列中的至少一项:车牌号码特征、车辆属性特征和车辆外观特征。10.根据权利要求9所述的方法,其中,所述关联特征包括下列中的至少一项:车牌汉明距离、车辆属性相似度、车辆外观相似度、时间距离、周期关联特征、空间欧式距离和空间路网距离。11.根据权利要求7所述的方法,其特征在于,所述根据所述图像特征和所述关联特征,构建每个所述对象图像对应的图结构,包括:将多个所述对象图像中的第一对象图像对应的图像特征作为顶点的节点特征;将多个所述对象图像中的每个第二对象图像对应的图像特征分别作为邻居节点的节点特征;其中,所述第二对象图像为多个所述对象图像中所述第一对象图像以外的图像;根据所述第一对象图像与每个所述第二对象图像之间的关联特征,计算所述第一对象图像与每个所述第二对象图像之间的特征权重;根据所述第一对象图像与每个所述第二对象图像之间的关联特征和特征权重,确定所述顶点与每个所述邻居节点之间的边特征;利用所述顶点的节点特征、所述邻居节点的节点特征和所述边特征,构建所述第一对象图像对应的图结构。12.根据权利要求7所述的方法,其中,所述根据所述图像特征和所述关联特征,构建每个所述对象图像对应的图结构,包括:将多个所述对象图像中的第一对象图像对应的图像特征作为顶点的节点特征;将多个所述对象图像中的每个第三对象图像对应的图像特征分别作为邻居节点的节点特征;其中,所述第三对象图像对应的图像采集设备与所述第一对象图像对应的图像采集设备之间的设备距离满足预设条件;根据所述第一对象图像与每个所述第三对象图像之间的关联特征,确定所述顶点与每个所述邻居节点之间的边特征;利用所述顶点的节点特征、所述邻居节点的节点特征和所述边特征,构建所述第一对象图像对应的图结构。13.根据权利要求6所述的方法,其中,所述基于预设图神经网络对多个所述对象图像对应的图结构进行聚类处理,得到至少一组图结构组,包括:将每个所述图结构分别输入所述预设图神经网络,得到每个所述图结构的嵌入向量;对多个所述图结构的嵌入向量进行聚类处理,得到至少一组嵌入向量组;基于嵌入向量与图结构的对应关系,确定每组所述嵌入向量组对应的图结构组。14.根据权利要求13所述的方法,其中,所述对多个所述图结构的嵌入向量进行聚类处理,得到至少一组嵌入向量组,包括:计算每两个所述嵌入向量之间的向量距离;
根据所述向量距离对多个所述嵌入向量进行聚类处理,得到至少一组所述嵌入向量组。15.根据权利要求6所述的方法,其中,所述基于预设图神经网络对多个所述对象图像对应的图结构进行聚类处理,得到至少一组图结构组之前,所述方法还包括:获取多组训练样本;其中,每组所述训练样本包括多个图结构样本和每个图结构样本对应的标记值,每个所述图结构样本对应一个图像样本,所述标记值用于表征所述图结构样本与其他图结构样本属于同一个移动对象的可能性;利用多组所述训练样本训练图神经网络,得到所述预设图神经网络。16.根据权利要求6所述的方法,其中,所述对所述移动特征进行时空点位匹配,得到所述移动对象的行驶轨迹,包括:将每组所述图结构组对应的对象图像的时空特征输入预设序列模型进行时空点位匹配,得到每组所述图结构组对应的移动对象的行驶轨迹;其中,所述时空特征包括所述对象图像的采集时间和所述对象图像的采集地点。17.根据权利要求16所述的方法,其中,所述预设序列模型包括隐马尔可夫模型和最短欧氏距离模型中的任一个。18.根据权利要求17所述的方法,其中,所述行驶轨迹包括时间序列和地点序列。19.一种数据处理方法,包括:获取道路数据和移动对象的图像数据;其中,所述移动对象包括目标车辆;基于所述图像数据,获取所述目标车辆的图像特征;基于所述图像特征和所述道路数据,确定所述目标车辆的移动特征;对所述移动特征进行时空点位匹配,得到所述目标车辆的行驶轨迹。20.根据权利要求19所述的方法,其中,所述对所述移动特征进行时空点位匹配,得到所述目标车辆的行驶轨迹之后,所述方法还包括:显示所述行驶轨迹。21.根据权利要求19所述的方法,其中,所述对所述移动特征进行时空点位匹配,得到所述目标车辆的行驶轨迹之后,所述方法还包括:获取所述目标车辆的实时位置;基于所述实时位置和所述行驶轨迹,调整所述目标车辆的移动方向。22.一种数据处理装置,包括:第一获取模块,用于获取道路数据和移动对象的图像数据;第一处理模块,用于基于所述图像数据,获取移动对象的图像特征;第二处理模块,用于基于所述图像特征和所述道路数据,确定所述移动对象的移动特征;第三处理模块,用于对所述移动特征进行时空点位匹配,得到所述移动对象的行驶轨迹。23.一种数据处理装置,包括:第二获取模块,用于获取道路数据和移动对象的图像数据;其中,所述移动对象包括目标车辆;第四处理模块,用于基于所述图像数据,获取所述目标车辆的图像特征;
第五处理模块,用于基于所述图像特征和所述道路数据,确定所述目标车辆的移动特征;第六处理模块,用于对所述移动特征进行时空点位匹配,得到所述目标车辆的行驶轨迹。24.一种数据处理设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;所述处理器执行所述计算机程序指令时实现如权利要求1-18或权利要求19-21任意一项所述的数据处理方法。25.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-18或权利要求19-21任意一项所述的数据处理方法。
技术总结
本发明公开了一种数据处理方法、装置、设备及介质。其中,一种数据处理方法包括:获取道路数据和移动对象的图像数据;基于图像数据,获取移动对象的图像特征;基于图像特征和道路数据,确定移动对象的移动特征;对移动特征进行时空点位匹配,得到移动对象的行驶轨迹。根据本发明实施例,能够提高所还原的车辆的行驶路径轨迹的全面性和可靠性。路径轨迹的全面性和可靠性。路径轨迹的全面性和可靠性。
技术研发人员:蔡思佳 童潘榕 谢贤海 陈均炫 邓兵
受保护的技术使用者:阿里巴巴集团控股有限公司
技术研发日:2020.05.22
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。