模糊神经petri网优化算法
技术领域
1.本发明属于模糊petri网技术领域,涉及模糊petri网算法优化,尤其是一种模糊神经petri网优化算法。
背景技术:
2.模糊神经petri网将petri网与模糊理论相结合,并引入神经网络算法而提出的。
3.目前,已有针对fnpn的相关研究,文献提出了一种基于bp算法的无回路模糊petri网(fuzzy petri net,fpn)模型的自学习推理算法,使得网络具有很好的泛化和自适应能力,但是网络震荡趋势较大;采用基于专家经验的系统结构,文献提出了一种适合于可靠性估计的既可以表示模糊产生式规则的知识库系统又具有学习能力的fnpn模型,但是并没有考虑到网络震荡性的问题;文献提出一种自适应fpn,通过对变迁点燃条件的判断及变迁点燃后传递给输出库所的新标记,建立s型连续函数并引入bp算法,实现了对知识的动态推理及学习,但是没有在专家系统方面进行预测。此外,
4.除此之外,fnpn在故障诊断方面的研究也存在收敛慢或震荡较大等问题。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提出一种适合于基于专家经验系统结构的fnpn模型的参数修正优化算法,即在传统bp神经网络参数修正公式中加入新型动量项,从而达到改善学习收敛速度、提高计算精确度并减小网络震荡的效果。
6.一种模糊神经petri网优化算法,包括以下步骤:
7.步骤1、针对fnpn模型中变迁的使能条件及fnpn的样本数据学习训练中的特点采用两种s型连续函数分别表示变迁使能及变迁点燃后的新标记值;
8.步骤2、增加新型动量项,在传统的权值、置信度及阈值修正公式中增加一个新型动量项;
9.步骤3、对系统设置初始值,将所有输入权值、变迁置信度以及节点阈值的初始值设置为较小的随机数,令输入命题和中间命题的总个数为m,变迁的总个数为n,样本总数为n,i和j分别为1;
10.步骤4、自动生成目标函数f并规定误差限ε,输入随机样本数据以及期望输出、函数f1(x)和f2(x)的各常数值,根据f1(x)判断出的结果对使能的变迁t利用f2(x)计算出实际输出,得到初始误差f0,若f0<ε,则结束;否则就直接进入下一步;
11.步骤5、对权值进行调整,并且判断是否每一个权值都大于等于零,若有权值小于零,则改变动量因子α的值,重新调整原来的权值,其中,η为学习率,α为动量因子;依据调整后的权值,重新计算得到的误差值,直到误差值f
i
<f
i-1
;
12.步骤6、判断f
i
是否已经达到规定的误差限,若没有,则开始下一轮的训练;对变迁的置信度、节点阈值同样进行训练。
13.进一步,在步骤1中,模糊神经petri网fnpn定义为一个十二元组
14.fnpn=(p,t,d,a,w,m0,k
p
,k
t
,μ,α,β,θ)
15.其中:p,t,d,a,m0,α,β,θ的含义同模糊petri网定义;m0:p
→
[0,1]为初始模糊标识;k
p
为隐含层和输出层库所的活动状态集;k
t
为变迁集t到规则集的一一映射;μ:t
→
[0,1]为置信度集合,它与每个变迁一一映射。
[0016]
进一步,在步骤1中,两种s型连续函数为:
[0017]
和
[0018]
进一步,在步骤4中,目标函数、初始误差分别为:
[0019]
和
[0020]
本发明的优点和积极效果是:
[0021]
本发明设计合理,提出的fnpn优化算法利用带有不同参数的s型函数不仅使得fnpn学习训练过程变迁t使能状态的判断更快捷、变迁点燃后传递给输出库所的新标记值结果更精确;而且在训练过程中为了改善网络的收敛特性,在增大学习率的同时不至于产生震荡,在传统的参数修正公式中引入动量项对网络中的权值、阈值及置信度进行修改,经过证明此调整算法是收敛的。
附图说明
[0022]
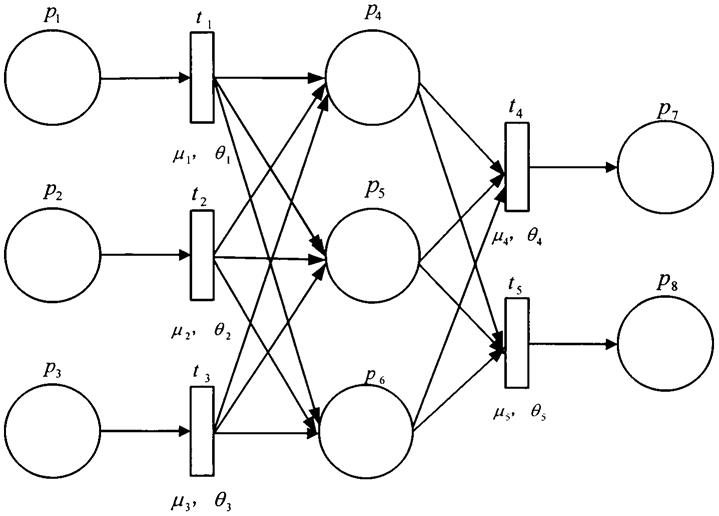
图1为模糊神经petri网模型。
具体实施方式
[0023]
以下结合实施例对本发明做进一步详述:
[0024]
一种模糊神经petri网优化算法,包括以下步骤:
[0025]
步骤1:给出具体问题。
[0026]
现有一个专家系统r,系统中命题集为d={d1,d2,d3,d4,d5,d6,d7,d8},模糊产生式规则如下:
[0027]
if d1or d2or d3then d4(μ1,μ2,μ3,θ1,θ2,θ3)
[0028]
if d1or d2or d3then d5(μ1,μ2,μ3,θ1,θ2,θ3)
[0029]
if d1or d2or d3then d6(μ1,μ2,μ3,θ1,θ2,θ3)
[0030]
if d4and d5and d6then d7(μ4,θ4,w
44
,w
45
,w
46
)
[0031]
if d4and d5and d6then d8(μ5,θ5,w
54
,w
55
,w
56
)
[0032]
其中
[0033]
w
54
w
55
w
56
=1
[0034]
w
44
w
45
w
46
=1
[0035]
步骤2:构建fnpn模型。
[0036]
该专家系统r对应的fnpn模型如图所示。
[0037]
fnpn模型为
[0038]
fnpn1=(p,t,d,i,o,α,β,cf,th,w)
[0039]
其中:p={p1,p2,p3,p4,p5,p6,p7,p8};t={t1,t2,t3,t4,t5};d={d1,d2,d3,d4,d5,d6,d7,d8};i(t1)={p1},i(t2)={p2},i(t3)={p3},i(t4)={p4,p5,p6},i(t5)={p4,p5,p6};o
(t1)={p4,p5,p6},o(t2)={p4,p5,p6},o(t3)={p4,p5,p6},o(t4)={p7},o(t5)={p8};cf={μ1,μ2,μ3,μ4,μ5};th={θ1,θ2,θ3,θ4,θ5};w={w
11
,w
22
,w
33
,w
44
,w
45
,w
46
,w
54
,w
55
,w
56
}。
[0040]
步骤3:假设初始输入库所的标记值分别为0.9、0.8、0.95,变迁的置信度分别为0.7、0.9、0.8、0.95、0.98,阈值分别为0.6、0.7、0.7、0.72、0.65,初始权值为w
11
=w
22
=w
33
,w
44
=0.4,w
45
=0.3,w
46
=0.3,w
54
=0.35,w
55
=0.35,w
56
=0.3。
[0041]
步骤4:fnpn1的期望输出值计算过程为:
[0042]
①
判断变迁t1、t2和t3的使能状态。
[0043]
库所p1传递标识给t1后,利用函数f1(x)判断t1的使能状态,经计算可知x1=m(p1)w
11
=0.9,x
1-θ1=0.3>0,当常数b足够大时f1(x1)=1,即变迁t1是使能的。同理可知,变迁t2和t3也是使能的。
[0044]
②
计算库所p4、p5和p6的标记值。
[0045]
对于p4来说,m(p4)=max{m(p1)w
11
μ1,m(p2)w
22
μ2,m(p3)w
33
μ3}=0.76同理可计算得m(p5)=0.76,m(p5)=0.76。
[0046]
③
判断变迁t4和t5的使能状态
[0047]
p4、p5和p6传递标识给t4后,利用函数f1(x)判断t4的使能状态,经计算可知x4=m(p4)w
44
m(p5)w
45
m(p6)w
46
=0.76且x
4-θ4=0.04>0,当常数b总够大时f1(x4)=1,即变迁t4是使能的。同理可知,变迁t5也是使能的。
[0048]
④
计算最终输出库所p7和p8的标记值
[0049]
对于p7来说,m(p7)=min{m(p4)w
44
μ4,m(p5)w
45
μ5,m(p6)w
46
μ6}=0.2166,同理可计算得m(p8)=0.22344。
[0050]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。