1.本实用新型属于农用辅助器械技术领域,具体涉及一种萝卜收获装置。
背景技术:
2.萝卜是根菜类的主要蔬菜,其茎直立、粗壮,呈圆柱形,其埋在地下的根茎可达20多公分,收获时需人工挖土和拔出。目前绝大多数还采用人工的小规模作业或者采用大型农用机械进行的大规模作业。人工收获萝卜时,需要工人弯腰蹲在地上或用铁锹用力进行操作,劳动强度大,生产效率低;大型农用机械收获时,必须是大规模的萝卜种植区域才可以,而且收获成本大,存在破坏果实的风险。成熟期的萝卜,收获周期短,工作量大,因此研发萝卜收获装置成为亟待解决的问题。
3.专利cn201156882y提供一种拔取式萝卜收获机,其采用激振器给胡萝卜两边松土,再用内、外输送带夹住萝卜缨,继而将萝卜拔起,该装置可以迅速、快捷的收获胡萝卜,但是其结构复杂,仅适合于田间大规模的垄作式收获;专利cn202773359u提供一种胡萝卜收获机螺旋扶禾装置,其利用旋转的左、右螺旋扶禾器,把倒伏在地面的胡萝卜秧扶起来,送入夹持机构完成收获作业,其技术方案存在以下缺陷:仅仅依靠高速旋转的螺旋扶禾器夹住萝卜缨将胡萝卜拔出,容易把萝卜缨夹断,导致胡萝卜不能正常拔出。
技术实现要素:
4.为了解决现有的萝卜收获装置结构复杂、制造加工困难、收获价格昂贵、萝卜不能正常拔出等问题,本实用新型提供一种萝卜收获装置,具有结构简单、造价便宜、操作方便等优点。
5.为解决现有技术的不足,本实用新型提供的技术方案为:
6.本实用新型提供一种萝卜收获装置,包括手柄、轴承、电机、旋转轴、弹簧、提拉杆、固定架、旋转筒、左横轴、右横轴、左竖轴、右竖轴、左拔取器和右拔取器;
7.所述手柄下部外侧面与所述电机上端相配合;手柄下端内部设有轴承套,轴承套与所述轴承的外圈固定连接;
8.所述旋转筒为上下贯通的薄壁圆筒;
9.所述旋转轴为圆管状,上端与电机的输出轴固定连接,下端通过固定架与旋转筒的上端相连;旋转轴上设有定位槽;
10.所述弹簧位于旋转轴的内部,上端与轴承的内圈固定连接;
11.所述提拉杆上部位于旋转轴内部,提拉杆上端与弹簧下端固定连接;所述提拉杆顶部设有定位销;所述提拉杆下端通过固定销连接所述左横轴的端部和所述右横轴的端部;
12.所述定位销穿过定位槽;
13.所述左横轴与所述左竖轴的上部铰接;所述右横轴与所述右竖轴上部铰接;
14.所述左竖轴上端与旋转筒的内壁铰接;下端与所述左拔取器相连;
15.所述右竖轴上端与旋转筒的内壁铰接;下端与所述右拔取器相连;
16.所述左拔取器和右拔取器均为弧形。
17.优选的,所述右拔取器为磁性材质,所述左拔取器为钢材。
18.优选的,所述左拔取器和右拔取器均为半圆形;左拔取器和右拔取器的直径为3
‑
20cm。
19.优选的,所述旋转轴长度为300
‑
500mm。
20.优选的,所述定位槽的长度为50
‑
100mm。
21.优选的,所述弹簧的弹性系数不低于1500n/m。
22.优选的,所述提拉杆的长度为130
‑
200mm。
23.优选的,所述左横轴和右横轴长度为25
‑
30mm;所述左竖轴和右竖轴长度为50
‑
120mm。
24.优选的,所述旋转筒直径为100
‑
150mm,高为150
‑
200mm;
25.所述旋转筒的壁厚从上到下逐渐减小;旋转筒上端壁厚为2
‑
8mm,底端壁厚为0.2
‑
1mm;
26.所述旋转筒底端为不规则曲线。
27.优选的,所述旋转筒内壁设有两条竖直向下的深度为2mm的槽;所述槽位于左竖轴和右竖轴的外侧。
28.本实用新型的有益效果:
29.1)本实用新型结构简单、体积小,收获方法易行,且收获成本低;
30.2)本实用新型适用于非大规模的种植区域和非规则种植区域使用;
31.3)本实用新型不会损伤农作物,且收获成功率高,装置更加可靠。
附图说明
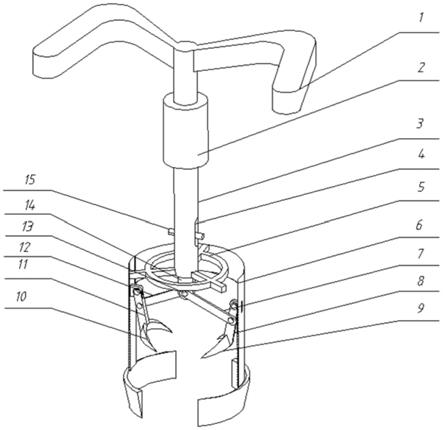
32.图1是本实用新型提供的萝卜收获装置的结构示意图;
33.图2是本实用新型提供的旋转轴的内部结构示意图;
34.图3是本实用新型提供的旋转筒的内部结构示意图;
35.图4是本实用新型提供的旋转筒的外部结构示意图;
36.图5是本实用新型提供的萝卜收获装置收获萝卜时的初始状态示意图;
37.图6是本实用新型提供的萝卜收获装置收获萝卜时的中间状态示意图;
38.图7是本实用新型提供的萝卜收获装置收获萝卜时的结束状态示意图;
39.其中,1、手柄;2、电机;3、旋转轴;4、定位槽;5、三角架;6、旋转筒;7、右横轴;8、右竖轴;9、右拔取器;10、左拔取器;11、左竖轴;12、左横轴;13、固定销;14、提拉杆;15、定位销;16、弹簧。
具体实施方式
40.下面结合实施方式对本实用新型作进一步描述。以下实施方式仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
41.本实用新型实施例提供一种萝卜收获装置,参见图1,包括手柄1、轴承、电机2、旋转轴3、弹簧16、提拉杆14、固定架、旋转筒6、左横轴12、右横轴7、左竖轴11、右竖轴8、左拔取
器10和右拔取器9。
42.参见图1,手柄1下部外侧面与电机2上端相配合,可相对移动。手柄1下端内部设有轴承套,轴承套与轴承的外圈固定连接。参见图1及图3,旋转筒6为上下贯通的薄壁圆筒。旋转轴3为圆管状,上端与电机2的输出轴固定连接,下端通过固定架与旋转筒6的上端相连;旋转轴3上设有定位槽4。参见图2,弹簧16位于旋转轴3的内部,上端与轴承的内圈固定连接。参见图1及图2,提拉杆14上部位于旋转轴3内部,提拉杆14上端与弹簧16下端固定连接;提拉杆14顶部设有通孔,用于安装定位销15;定位销15穿过定位槽4;提拉杆14下端通过固定销13连接左横轴12的端部和右横轴7的端部。参见图1及图3,左横轴12另一端与左竖轴11的上部铰接;右横轴7另一端与右竖轴8上部铰接;左竖轴11上端与旋转筒6的内壁铰接;下端与左拔取器10相连;右竖轴8上端与旋转筒6的内壁铰接;下端与右拔取器9相连;左拔取器10和右拔取器9均为弧形,左横轴12、右横轴7、左竖轴11、右竖轴8、左拔取器10和右拔取器9都安装于旋转筒6内。
43.电机的作用是提供旋转筒进入泥土的力,以减轻操作者的劳动强度。
44.优选的,本实用新型提供的萝卜收获装置还包括二次电池,二次电池用于给电机供电。
45.优选的,参见图1、图5至图7,手柄1为w型,可以方便操作者手握和用力。
46.在本实用新型的其他实施例中,手柄可以为圆环形。
47.优选的,参见图1,固定架为三脚架5,旋转轴3下端与三角架5中心固定连接,三角架5三边分别与旋转筒6固定连接。
48.优选的,右拔取器为磁性材质,左拔取器为钢材,使得左拔取器和右拔取器之间具有吸引力,便于合拢。
49.优选的,参见图1,左拔取器10和右拔取器9均为半圆形。
50.优选的,左拔取器和右拔取器的直径为3
‑
20cm。实际使用中,左拔取器和右拔取器可以以可拆卸的方式与左数轴、右数轴进行固定,根据需要拔取的萝卜直径范围更换不同型号的左拔取器和右拔取器。
51.在本实用新型的其他实施例中,左拔取器和右拔取器内侧固定有弹性材料层,如橡胶层。
52.优选的,旋转轴长度为300
‑
500mm,操作者不必弯腰即可使用。
53.优选的,旋转轴的长度为400mm。
54.优选的,定位槽的长度为50
‑
100mm。定位槽与定位销配合,限制手柄的移动范围。
55.优选的,定位槽的长度为60mm。
56.优选的,弹簧的弹性系数不低于1500n/m,弹簧可采用碳素弹簧钢丝或琴钢丝。
57.优选的,弹簧的弹性系数为1500
‑
2000n/m。
58.优选的,提拉杆的长度为130
‑
200mm。
59.优选的,提拉杆的长度为150mm。
60.优选的,左横轴和右横轴长度为25
‑
30mm;左竖轴和右竖轴长度均为50
‑
120mm。
61.优选的,左横轴和右横轴长度为27mm;左竖轴和右竖轴长度为80mm。
62.优选的,旋转筒直径为100
‑
150mm,高为150
‑
200mm。
63.在本实用新型的其他实施例中,旋转筒的高度可以减小,左拔取器和右拔取器位
于旋转筒的下部,拔取萝卜时保证左拔取器和右拔取器深入泥土中即可。
64.优选的,旋转筒直径为110mm,高为150mm。
65.优选的,旋转筒的壁厚从上到下逐渐减小;旋转筒上端壁厚为2
‑
8mm,优选3mm,底端壁厚为0.2
‑
1mm,优选0.5mm。旋转筒的壁厚做渐薄处理可以减小旋转筒入土的阻力。
66.优选的,参见图4,旋转筒6底端为不规则曲线,采用不规则曲面设计能达到减少阻力的目的。
67.优选的,旋转筒内壁设有两条竖直向下的深度为2mm的槽;槽位于左竖轴和右竖轴的外侧,用于放置左竖轴和右竖轴。
68.具体使用时,使用者使用该装置收获萝卜时,两只手握住手柄1,将旋转筒6底部对准目标萝卜,通过手柄1将旋转筒6压在土地上,手柄1带动弹簧16,弹簧16带动提拉杆14和定位销15下移,直到定位销15到定位槽4底端为止,打开电机2高速挡,电机2带动旋转轴3高速转动,旋转轴3带动三角架5和提拉杆14转动,三角架5带动旋转筒6高速转动,提拉杆14带动左横轴12和右横轴7高速转动,左横轴12和右横轴7分别带动左竖轴11和右竖轴8转动,左竖轴11和右竖轴8分别带动左拔取器10和右拔取器9高速旋转,利用旋转筒6的高速旋转将其三分之二转入泥土中,此时定位销15在定位槽4的最底部,见图5。当旋转筒6有三分之二进入到泥土中时,打开电机2低速挡,在松土的同时降低转速防止损伤萝卜,同时松开手柄1,利用弹簧16的弹力和人的提拉力将提拉杆14上提,提拉杆14带动左横轴12和右横轴7向上运动,同时左横轴12和右横轴7分别带动左竖轴11和右竖轴8内收,使得左拔取器10和右拔取器9有合拢之势,此时定位销15在定位槽4的中间,见图6。当左拔取器10和右拔取器9合拢夹住萝卜时,缓慢地向上提拉手柄1,直至把整个旋转筒6拔出泥土,此时定位销15在定位槽4的最顶端,见图7。之后将手柄1下压至最低点,萝卜就会从旋转筒6中掉出,关闭电机2,完成一个收获周期。
69.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。