智能网联gvt模型车驱动平台
技术领域
1.本实用新型涉及智能车测试场技术领域,具体涉及一种智能网联gvt模型车驱动平台。
背景技术:
2.gvt模型车是一种质量很轻的气球车,固定在驱动平台上,平台可以拖动gvt模型车自由移动,这样可以模拟真实车辆在道路上行驶,但是普通的测试平台大多为拖拽驱动,或者是前驱或后驱的驱动方式前进后退,对于受空间局限的实验场地无法进行原地转向, 很难保证实验的数据准确,而且实验平台多数为比较大的个体,反射雷达信号的概率较大,影响模型车的实验效果。
技术实现要素:
3.本实用新型提供了一种智能网联gvt模型车驱动平台,用来解决上述背景技术中出现的技术问题。智能网联gvt模型车驱动平台,包括壳体、驱动机构、控制模块、电池、减震机构,其特征在于所述壳体外端喷涂隐身涂层,驱动机构设置在壳体的四角中部,控制模块与驱动机构控制连接,电池通过控制模块电控驱动机构,减震机构设置在驱动机构与壳体之间,所述驱动机构主体为支撑体,支撑体的前端转动设有轮毂电机,支撑体的后端与壳体铰接,所述控制模块的控制器电控至少两个电机驱动模块,控制器同时还电控连接有气泵,气泵与减震机构通过输气管连接,电池电连接控制器。
4.优选的,智能网联gvt模型车驱动平台,其特征在于所述壳体的上端面设有凸起,凸起位置位于驱动机构轮毂电机的上方,壳体下方设有轮毂电机突出的轮廓。
5.优选的,智能网联gvt模型车驱动平台,其特征在于所述减震机构设置在驱动机构的支撑体与壳体之间,减震机构为减震机构的减震气囊。
6.优选的,智能网联gvt模型车驱动平台,其特征在于控制器电控的两个电机驱动模块分别电控连接纵向的两个驱动机构的轮毂电机,纵向的两个驱动机构与电机驱动模块形成一个独立的单元,每个独立的单元通过控制器并联。
7.优选的,智能网联gvt模型车驱动平台,其特征在于气泵的前端与输气管10的连接处设有压力传感器,压力传感器受控制器电控连接。
8.有益效果:控制器通过电机驱动模块来控制左右侧的轮毂电机,从而使轮毂电机的纵列向上成为独立驱动转动的单元,可以原地转弯,更加机动灵活,通过减震机构和气泵与控制器的结合,当发生碾压时控制器发出急停信号,电机停转,从而达到碾压即停的目的,驱动平台外部整体涂有隐身涂层,保证在测试过程中对车载雷达的隐身能力。
附图说明
9.图1为本实用新型俯视图剖析图;
10.图2为本实用新型侧视图剖徐图;
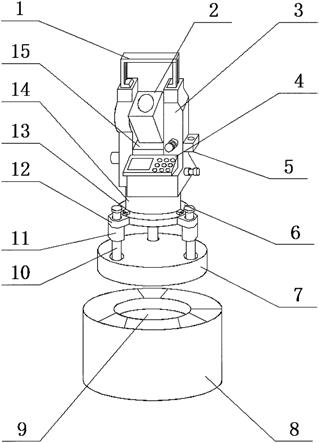
11.图3为本实用新型与模型车结合示意图;
12.图中:壳体1、电池2、减震机构3、支撑体4、轮毂电机5、控制器6、电机驱动模块7、气泵8、压力传感器9、输气管10。
具体实施方式
13.下面结合附图对本实用新型实施过程进行详细描述,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
14.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,可以是粘合连接,可以是焊接连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
15.智能网联gvt模型车驱动平台,包括壳体1、驱动机构、控制模块、电池2、减震机构3,其特征在于所述壳体1外端喷涂隐身涂层,驱动机构设置在壳体1的四角中部,控制模块与驱动机构控制连接,电池2通过控制模块电控驱动机构,减震机构3设置在驱动机构与壳体1之间,所述驱动机构主体为支撑体4,支撑体4的前端转动设有轮毂电机5,支撑体4的后端与壳体1铰接,所述控制模块的控制器6电控至少两个电机驱动模块7,控制器6同时还电控连接有气泵8,气泵8与减震机构3通过输气管10连接,电池2电连接控制器6。
16.进一步的,壳体1的上端面设有凸起,凸起位置位于驱动机构轮毂电机5的上方,壳体1下方设有轮毂电机5突出的轮廓。
17.进一步的,减震机构3设置在驱动机构的支撑体4与壳体1之间,减震机构3为减震机构3的减震气囊。
18.进一步的,控制器6电控的两个电机驱动模块7分别电控连接纵向的两个驱动机构的轮毂电机5,纵向的两个驱动机构与电机驱动模块7形成一个独立的单元,每个独立的单元通过控制器6并联。
19.进一步的,气泵8的前端与输气管10的连接处设有压力传感器9,压力传感器9受控制器6电控连接。
20.本方案所涉及的控制器优选可编程的多方式控制的控制器,其“多方式”包括数控及机械控制等,根据图1所示,箭头方向为驱动平台的前进方向,电池2给整个系统供电,控制器6可以通过电机驱动模块7驱动左右侧的轮毂电机5转动,气泵8可以调节气体压力来控制减震机构3的减震气囊的伸缩长度,从而控制轮毂电机5的上下运动。
21.转向原理:控制器6通过电机驱动模块7来控制左右侧的轮毂电机5,当右侧转速>左侧转速时左转,当左侧转速>右侧转速时右转。并且可以原地转弯,更加机动灵活。
22.抗碾压原理:在真实车辆在智能网联场景测试过程中,当车辆碾压到驱动平台上时,由于真实车辆较重,减震机构3的减震气囊被压缩,从而轮毂电机5缩回到壳体1里,从而达到抗压目的,由于空气被压缩,压力传感器9通过输气管10检测到压力突然升高,控制器6发出急停信号,电机停转,从而达到碾压即停的目的。
23.隐身功能:驱动平台壳体1外部整体涂有隐身涂层,保证在测试过程中对车载雷达
的隐身能力。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.智能网联gvt模型车驱动平台,包括壳体(1)、驱动机构、控制模块、电池(2)、减震机构(3),其特征在于所述壳体(1)外端喷涂隐身涂层,驱动机构设置在壳体(1)的四角中部,控制模块与驱动机构控制连接,电池(2)通过控制模块电控驱动机构,减震机构(3)设置在驱动机构与壳体(1)之间,所述驱动机构主体为支撑体(4),支撑体(4)的前端转动设有轮毂电机(5),支撑体(4)的后端与壳体(1)铰接,所述控制模块的控制器(6)电控至少两个电机驱动模块(7),控制器(6)同时还电控连接有气泵(8),气泵(8)与减震机构(3)通过输气管10连接,电池(2)电连接控制器(6)。2.根据权利要求1所述的智能网联gvt模型车驱动平台,其特征在于所述壳体(1)的上端面设有凸起,凸起位置位于驱动机构轮毂电机(5)的上方,壳体(1)下方设有轮毂电机(5)突出的轮廓。3.根据权利要求1所述的智能网联gvt模型车驱动平台,其特征在于所述减震机构(3)设置在驱动机构的支撑体(4)与壳体(1)之间,减震机构(3)为减震机构(3)的减震气囊。4.根据权利要求1所述的智能网联gvt模型车驱动平台,其特征在于控制器(6)电控的两个电机驱动模块(7)分别电控连接纵向的两个驱动机构的轮毂电机(5),纵向的两个驱动机构与电机驱动模块(7)形成一个独立的单元,每个独立的单元通过控制器(6)并联。5.根据权利要求1所述的智能网联gvt模型车驱动平台,其特征在于气泵(8)的前端与输气管(10)的连接处设有压力传感器(9),压力传感器(9)受控制器(6)电控连接。
技术总结
智能网联GVT模型车驱动平台,壳体外端喷涂隐身涂层,驱动机构设置在壳体的四角中部,控制模块与驱动机构控制连接,电池通过控制模块电控驱动机构,驱动机构主体为支撑体,支撑体的前端转动设有轮毂电机,控制模块的控制器电控至少两个电机驱动模块,控制器同时还电控连接有气泵,气泵与减震机构通过输气管连接,电池电连接控制器,控制器通过电机驱动模块来控制左右侧的轮毂电机,从而使轮毂电机的纵列向上成为独立驱动转动的单元,可以原地转弯,更加机动灵活,通过减震机构和气泵与控制器的结合,当发生碾压时控制器发出急停信号,电机停转,从而达到碾压即停的目的,驱动平台外部整体涂有隐身涂层,保证在测试过程中对车载雷达的隐身能力。达的隐身能力。达的隐身能力。
技术研发人员:黄晓波 田晓冲 李铁生 王永泉 门艳平 刘雨心 陈艾家 单俊凯
受保护的技术使用者:中机寰宇(山东)车辆认证检测有限公司
技术研发日:2021.07.06
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。