技术特征:
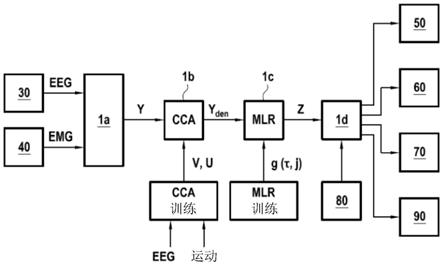
1.用于从生物电势信号获得连续信号的计算机实现的方法,其特征在于,包括:由计算机通过使用统计相关性分析算法从所述生物电势信号分离混杂分量以获得去噪的神经信号;以及由所述计算机从所述去噪的神经信号解码所述连续信号。2.根据权利要求1所述的计算机实现的方法,其特征在于,所述连续信号是连续运动动作命令。3.根据权利要求1或2中任一项所述的计算机实现的方法,其特征在于,所述统计相关性分析算法是典型相关性分析算法。4.根据权利要求1至3中任一项所述的计算机实现的方法,其特征在于,使用基于生物电势信号和相关的运动数据、视觉、声学或其他生物电势数据的现有数据集的模型来执行所述统计相关性分析算法。5.根据权利要求4所述的计算机实现的方法,其特征在于,所述相关运动数据包括emg数据、运动传感器数据或视觉运动捕获数据。6.根据权利要求1至5中任一项所述的计算机实现的方法,其特征在于,所述从所述去噪的神经信号解码所述连续信号是使用多线性回归模型来执行的。7.根据权利要求6所述的计算机实现的方法,其特征在于,所述多线性回归模型使在预期时间窗内所述连续信号与所述去噪的神经信号相关。8.根据权利要求1至7中任一项所述的计算机实现的方法,其特征在于,还包括在分离所述混杂分量之前对所述生物电势信号进行滤波。9.根据权利要求1至8中任一项所述的计算机实现的方法,其特征在于,还包括使用所述连续信号作为命令信号来操作机器。10.根据权利要求9所述的计算机实现的方法,其特征在于,所述机器是车辆。11.根据权利要求9所述的计算机实现的方法,其特征在于,所述机器是机械臂。12.根据权利要求9所述的计算机实现的方法,其特征在于,所述机器是假体装置。13.根据权利要求1至12中任一项所述的计算机实现的方法,其特征在于,还包括验证所述连续信号是否对应于可接受的连续命令集内的连续命令。14.根据权利要求1至13中任一项所述的计算机实现的方法,其特征在于,还包括由所述计算机将所述连续信号与由生成所述生物电势信号的人类用户操作的机器的响应进行比较。15.数据处理装置,其特征在于,包括被配置为执行根据权利要求1至14中任一项所述的计算机实现的方法的处理器。16.非侵入性脑机接口系统,其特征在于,包括根据权利要求15所述的数据处理装置以及连接至所述数据处理装置的eeg电极阵列或emg电极阵列。17.非暂时性计算机可读介质,其特征在于,包括指令,所述指令当由计算机执行时使所述计算机执行根据权利要求1至14中任一项所述的计算机实现的方法。
技术总结
用于从生物电势信号获得连续信号的计算机实现的方法,包括:由计算机通过使用统计相关性分析算法从生物电势信号分离混杂分量以获得去噪的神经信号;以及由计算机从去噪的神经信号解码连续信号。经信号解码连续信号。经信号解码连续信号。
技术研发人员:约纳斯
受保护的技术使用者:卡姆林意大利公司
技术研发日:2021.05.17
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。