1.本发明属于智能监控技术领域,具体涉及一种路边停车智能物联网管理系统。
背景技术:
2.智慧交通是智慧城市中的一个重要功能版块,智慧交通的本质在于对车辆的管理与监控,包括对行进中的车辆、停放中的车辆进行监管。如高速公路使用摄像头随机拍照对行进中的车辆进行抓拍,地下停车场对停放车辆进行登记、计时收费,但是对于路边停车的管理目前还没有完善的解决方案,多为人工监管,存在漏看、费时费力、恶劣天气下不便等种种问题。
3.因此,现阶段需设计一种路边停车智能物联网管理系统,来解决以上问题。
技术实现要素:
4.本发明目的在于提供一种路边停车智能物联网管理系统,用于解决上述现有技术中存在的技术问题,如:对于路边停车的管理目前还没有完善的解决方案,多为人工监管,存在漏看、费时费力、恶劣天气下不便等种种问题。
5.为实现上述目的,本发明的技术方案是:
6.一种路边停车智能物联网管理系统,包括传感器模块、后台管理模块、智能停车机器人;
7.所述传感器模块与所述后台管理模块通信连接,所述传感器模块用于检测车辆是否处于停车状态,当检测到车辆处于停车状态时,向所述后台管理模块反馈;
8.所述后台管理模块与所述智能停车机器人通信连接,当所述后台管理模块接收到车辆处于停车状态的反馈信息时,所述后台管理模块向所述智能停车机器人下发指令使其启动;
9.所述智能停车机器人移动到停车位对车辆进行车牌识别,并将车牌识别结果反馈至所述后台管理模块。
10.进一步优选的,所述智能停车机器人对车辆进行车牌识别时,采用机器识别或者电子车牌识别。
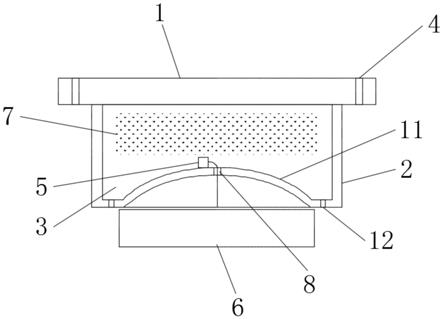
11.进一步优选的,所述智能停车机器人对车辆进行车牌识别时,其采集部分可根据车辆底盘的高度进行适应性自动升降。
12.进一步优选的,所述智能停车机器人总高度与车辆底盘之间存在一定间隔。
13.通过上述方案,传感器模块用于检测车辆是否处于停车状态,将传感器模块设置为长时间工作状态,当检测到车辆处于停车状态时,向后台管理模块反馈;然后智能停车机器人设置为长时间关闭状态,当后台管理模块接收到车辆处于停车状态的反馈信息时,后台管理模块向智能停车机器人下发指令使其启动,这样可以降低智能停车机器人的能耗;智能停车机器人移动到停车位对车辆进行车牌识别,并将车牌识别结果反馈至后台管理模块。为了使车牌识别更为精准,采用机器识别或者电子车牌识别。并且采集部分可根据车辆
底盘的高度进行适应性自动升降,从而全面适配各种车辆的车牌识别。智能停车机器人总高度与车辆底盘之间存在一定间隔,避免智能停车机器人与车辆底盘发生碰撞,影响车牌识别过程。
14.进一步优选的,还包括机器人停放装置,所述机器人停放装置与所述后台管理模块通信连接,
15.当所述智能停车机器人对车辆车牌识别完成后,自动归位到所述机器人停放装置,当所述机器人停放装置检测到所述智能停车机器人归位后向所述后台管理模块反馈。
16.进一步优选的,所述机器人停放装置可拆卸固定设置在停车位外侧。
17.进一步优选的,所述机器人停放装置通过锁定装置将所述智能停车机器人锁定住。
18.进一步优选的,所述机器人停放装置上配置有声音检测装置和人体检测装置;
19.所述声音检测装置用于检测停车位附近的声音信息;
20.所述人体检测装置用于检测停车位附近是否有人;
21.当所述声音检测装置检测到停车位附近不存在车辆启动的声音信息,且所述人体检测装置检测到停车位附近无人时;
22.所述机器人停放装置控制所述锁定装置打开锁定。
23.所述传感器模块包括地磁传感器和边界检测传感器;
24.所述地磁传感器用于检测车辆是否进入停车区;
25.所述边界检测传感器用于检测车辆是否完全进入停车区。
26.一种路边停车智能物联网管理方法,应用于一种路边停车智能物联网管理系统,具体包括以下步骤:
27.s1:通过地磁传感器判断车辆是否进入停车区,若是,则进入步骤s2;
28.s2:通过边界检测传感器判断车辆是否完全进入停车区,若是,则进入步骤s3,若否,则进行车辆不规范停车警示;
29.s3:通过声音检测装置判断停车区内的车辆是否熄火,若是,则进入步骤s4,若否,则进行车辆未熄火警示;
30.s4:通过人体检测装置判断停车区内是否有人,若否,则进入步骤s5;
31.s5:后台管理模块控制智能停车机器人移动到停车区对车辆进行车牌识别,并将车牌识别结果反馈至后台管理模块;
32.s6:后台管理模块控制智能停车机器人返回至机器人停放装置;
33.s7:机器人停放装置感应到智能停车机器人后,通过锁定装置将智能停车机器人锁定住;
34.s8:机器人停放装置提示停车管理结束,同时智能停车机器人向后台管理模块反馈停车管理结束。
35.在步骤s1中,若地磁传感器判断车辆未进入停车区,启动图像采集装置采集车辆当前信息并判断车辆是否进入停车区,若图像采集装置判断车辆已进入停车区,则判定所述地磁传感器故障;
36.提供一地磁输出信息检测装置和一地磁输入信息检测装置;
37.所述地磁输出信息检测装置用于检测所述地磁传感器的输出端是否存在正常运
行情况下标准的地磁检测输出信息;
38.所述地磁输入信息检测装置用于检测所述后台管理模块的输入端是否存在正常运行情况下标准的地磁检测输入信息;
39.当判定所述地磁传感器故障时,启动所述地磁输出信息检测装置和地磁输入信息检测装置;
40.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端不存在正常运行情况下标准的地磁检测输出信息,则判定地磁传感器故障;
41.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端存在正常运行情况下标准的地磁检测输出信息,所述地磁输入信息检测装置检测到所述后台管理模块的输入端不存在正常运行情况下标准的地磁检测输入信息,则判定所述地磁传感器与所述后台管理模块之间的通信故障;
42.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端存在正常运行情况下标准的地磁检测输出信息,所述地磁输入信息检测装置检测到所述后台管理模块的输入端存在正常运行情况下标准的地磁检测输入信息,则判定后台管理模块故障。
43.与现有技术相比,本发明所具有的有益效果为:
44.传感器模块用于检测车辆是否处于停车状态,将传感器模块设置为长时间工作状态(即,一直处于检测状态),当检测到车辆处于停车状态时,向后台管理模块反馈;然后智能停车机器人设置为长时间关闭状态(即,一直处于停止状态),当后台管理模块接收到车辆处于停车状态的反馈信息时,后台管理模块向智能停车机器人下发指令使其启动,这样可以降低智能停车机器人的能耗;智能停车机器人移动到停车位对车辆进行车牌识别,并将车牌识别结果反馈至后台管理模块。为了使车牌识别更为精准,采用机器识别或者电子车牌识别。并且采集部分可根据车辆底盘的高度进行适应性自动升降,从而全面适配各种车辆的车牌识别。智能停车机器人总高度与车辆底盘之间存在一定间隔,避免智能停车机器人与车辆底盘发生碰撞,影响车牌识别过程。同时不受天气影响;不会遗漏采集;与现有高位摄像头配合路边桩等形式相比,成本更低,受限条件较少;降低人工成本,管理范围更广。
附图说明
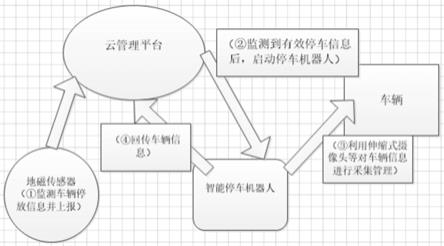
45.图1为本技术实施例1的系统构架示意图。
46.图2为本技术实施例3的步骤流程示意图。
具体实施方式
47.下面结合本发明的附图1和2,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.实施例1:
49.如图1所示,因此提出一种路边停车智能物联网管理系统,包括传感器模块、后台管理模块、智能停车机器人;
50.所述传感器模块与所述后台管理模块通信连接,所述传感器模块用于检测车辆是否处于停车状态,当检测到车辆处于停车状态时,向所述后台管理模块反馈;
51.所述后台管理模块与所述智能停车机器人通信连接,当所述后台管理模块接收到车辆处于停车状态的反馈信息时,所述后台管理模块向所述智能停车机器人下发指令使其启动;
52.所述智能停车机器人移动到停车位对车辆进行车牌识别,并将车牌识别结果反馈至所述后台管理模块。
53.进一步优选的,所述智能停车机器人对车辆进行车牌识别时,采用机器识别或者电子车牌识别。
54.进一步优选的,所述智能停车机器人对车辆进行车牌识别时,其采集部分可根据车辆底盘的高度进行适应性自动升降。
55.进一步优选的,所述智能停车机器人总高度与车辆底盘之间存在一定间隔。
56.进一步优选的,所述传感器模块包括地磁传感器和边界检测传感器;
57.所述地磁传感器用于检测车辆是否进入停车区;
58.所述边界检测传感器用于检测车辆是否完全进入停车区。
59.实施例1的工作原理简述:
60.传感器模块用于检测车辆是否处于停车状态,将传感器模块设置为长时间工作状态(即,一直处于检测状态),当检测到车辆处于停车状态时,向后台管理模块反馈;然后智能停车机器人设置为长时间关闭状态(即,一直处于停止状态),当后台管理模块接收到车辆处于停车状态的反馈信息时,后台管理模块向智能停车机器人下发指令使其启动,这样可以降低智能停车机器人的能耗;智能停车机器人移动到停车位对车辆进行车牌识别,并将车牌识别结果反馈至后台管理模块。为了使车牌识别更为精准,采用机器识别或者电子车牌识别。并且采集部分可根据车辆底盘的高度进行适应性自动升降,从而全面适配各种车辆的车牌识别。智能停车机器人总高度与车辆底盘之间存在一定间隔,避免智能停车机器人与车辆底盘发生碰撞,影响车牌识别过程。同时地磁传感器和边界检测传感器的联合检测,可确保车辆完全进入停车区,避免车辆停车不规范。
61.实施例2:
62.在实施例1的基础上进一步优选的,还包括机器人停放装置,所述机器人停放装置与所述后台管理模块通信连接,
63.当所述智能停车机器人对车辆车牌识别完成后,自动归位到所述机器人停放装置,当所述机器人停放装置检测到所述智能停车机器人归位后向所述后台管理模块反馈。使得智能停车机器人便于管理和存放。
64.进一步优选的,所述机器人停放装置可拆卸固定设置在停车位外侧。便于开展机器人停放装置的维修和巡检工作。
65.进一步优选的,所述机器人停放装置通过锁定装置将所述智能停车机器人锁定住。保证智能停车机器人在不动作时能够锁定在机器人停放装置处,从而保障了智能停车机器人的安全问题和降低异常发生。同时可以设定异常报警装置,当智能停车机器人与机器人停放装置出现异常时,可以进行异常报警。
66.进一步优选的,所述机器人停放装置上配置有声音检测装置和人体检测装置;
67.所述声音检测装置用于检测停车位附近的声音信息;
68.所述人体检测装置用于检测停车位附近是否有人;
69.当所述声音检测装置检测到停车位附近不存在车辆启动的声音信息,且所述人体检测装置检测到停车位附近无人时;
70.所述机器人停放装置控制所述锁定装置打开锁定。
71.通过上述方案,可以精准判定车辆是否已经停车完毕,车辆是否为本方案需要是被识别的目标车辆。
72.实施例3:
73.如图2所示,一种路边停车智能物联网管理方法,应用于一种路边停车智能物联网管理系统,具体包括以下步骤:
74.s1:通过地磁传感器判断车辆是否进入停车区,若是,则进入步骤s2;
75.s2:通过边界检测传感器判断车辆是否完全进入停车区,若是,则进入步骤s3,若否,则进行车辆不规范停车警示;
76.s3:通过声音检测装置判断停车区内的车辆是否熄火,若是,则进入步骤s4,若否,则进行车辆未熄火警示;
77.s4:通过人体检测装置判断停车区内是否有人,若否,则进入步骤s5;
78.s5:后台管理模块控制智能停车机器人移动到停车区对车辆进行车牌识别,并将车牌识别结果反馈至后台管理模块;
79.s6:后台管理模块控制智能停车机器人返回至机器人停放装置;
80.s7:机器人停放装置感应到智能停车机器人后,通过锁定装置将智能停车机器人锁定住;
81.s8:机器人停放装置提示停车管理结束,同时智能停车机器人向后台管理模块反馈停车管理结束。
82.在步骤s1中,若地磁传感器判断车辆未进入停车区,启动图像采集装置采集车辆当前信息并判断车辆是否进入停车区,若图像采集装置判断车辆已进入停车区,则判定所述地磁传感器故障;
83.提供一地磁输出信息检测装置和一地磁输入信息检测装置;
84.所述地磁输出信息检测装置用于检测所述地磁传感器的输出端是否存在正常运行情况下标准的地磁检测输出信息;
85.所述地磁输入信息检测装置用于检测所述后台管理模块的输入端是否存在正常运行情况下标准的地磁检测输入信息;
86.当判定所述地磁传感器故障时,启动所述地磁输出信息检测装置和地磁输入信息检测装置;
87.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端不存在正常运行情况下标准的地磁检测输出信息,则判定地磁传感器故障;
88.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端存在正常运行情况下标准的地磁检测输出信息,所述地磁输入信息检测装置检测到所述后台管理模块的输入端不存在正常运行情况下标准的地磁检测输入信息,则判定所述地磁传感器与所述后台管理模块之间的通信故障;
89.若所述地磁输出信息检测装置检测到所述地磁传感器的输出端存在正常运行情况下标准的地磁检测输出信息,所述地磁输入信息检测装置检测到所述后台管理模块的输入端存在正常运行情况下标准的地磁检测输入信息,则判定后台管理模块故障。
90.上述方案中,依次通过地磁传感器、边界检测传感器、声音检测装置、人体检测装置判断车辆已经规范停车(即,完全进入停车区、已熄火、驾驶人和乘客已经离开),然后智能停车机器人再开始停车识别检测,安全可靠。并通过图像采集装置来检验地磁传感器是否正常工作,当地磁传感器出现故障时,还通过地磁输出信息检测装置和地磁输入信息检测装置的配合,对地磁传感器进行故障定位。
91.以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。