技术特征:
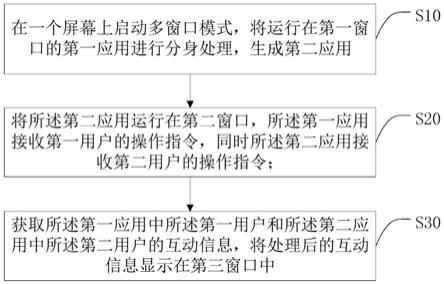
1.一种人眼虹膜图像中虹膜区域自动分割方法,其特征在于,包括以下步骤:步骤一:获取人眼虹膜图像数据集;步骤二:对步骤一中获取的数据集进行预处理操作,以得到预处理数据集;步骤三:将步骤二得到的预处理数据集输入训练好的深度卷积神经网络中;步骤四:将从步骤三中训练好的网络中提取骨干网卷积层的特征上采样到训练好的解码器中,得到每幅人眼虹膜图像中虹膜外圆区域的位置;步骤五:将从步骤三中训练好的网络中提取到的多个特征提取层的特征融合,然后输入到训练好的扩展版多层感知机中;步骤六:利用步骤五中训练好的扩展版多层感知机中预测得到的基于梯度向量流的主动轮廓模型的参数,由此拟合得到虹膜的内圆位置。2.根据权利要求1所述的人眼虹膜图像中虹膜区域自动分割方法,其特征在于,所述深度卷积神经网络包括顺次连接的简版的vggnet和上采样的解码器及扩展版的多层感知器。3.根据权利要求2所述的人眼虹膜图像中虹膜区域自动分割方法,其特征在于,所述简版的vggnet,网络结构如下:第一部分是输入层,其输入为300*400*3像素的矩阵;第二部分是特征抽取模块,共四个不同尺度的特征抽取层,每个特征抽取层包含有两个级联的卷积层,除去最后一个特征抽取层以外,其他每一层在最后均有最大池化层,取最后一层的输出矩阵作为提取的特征c1、c2、c3、c4,其大小分别是150*200*64、75*100*128、38*50*256和38*50*512。4.根据权利要求3所述的人眼虹膜图像中虹膜区域自动分割方法,其特征在于,所述上采样的编码器对简版的vggnet输出的特征c1、c2、c3、c4进行特征融合,上采样的编码器的网络结构如下:第一层是在特征c4输出上的两层卷积层,其卷积核尺寸均为3*3*256,步长均为1,均使用same模式填充,第一层输出经过上采样后得到的输出矩阵为76*100*256,记为upsample_1;第二层是通道融合层,其将裁剪过的输出矩阵upsample_1和输出矩阵c3通过通道数融合,输出矩阵大小为75*100*512;第三层同样是两层卷积层,其卷积核尺寸分别为3*3*256和3*3*128,步长均为1,均使用same模式填充,该层输出经过上采样后得到的输出矩阵为150*200*128,记为upsample_2;第四层是通道融合层,其将输出矩阵upsample_2和输出矩阵c2通过通道数融合,输出矩阵大小为150*200*256;第五层同样是两层卷积层,其卷积核尺寸分别为3*3*128和3*3*64,步长均为1,均使用same模式填充,第五层输出经过上采样后得到的输出矩阵为300*400*64,记为upsample_3;第六层是通道融合层,其将输出矩阵upsample_3和输出矩阵c1通过通道数融合,输出矩阵大小为300*400*128;第七层同样是两层卷积层,其卷积核尺寸分别为3*3*64和3*3*32,步长均为1,均使用same模式填充,其输出矩阵300*400*32;
第八层是卷积层,其卷积核尺寸为3*3*1,步长为1,第八层使用same模式填充,其输出矩阵的大小为300*400*1。5.根据权利要求4所述的人眼虹膜图像中虹膜区域自动分割方法,其特征在于,所述扩展版的多层感知器将简版的vggnet输出的特征c1、c2、c3、c4通过通道数融合然后输入到网络中,扩展版的多层感知器的网络结构如下:整个扩展版的多层感知器共五层卷积层,步长均为1且均采用same模型填充,卷积核尺寸分别是1*1*512,1*1*256,1*1*128,1*1*64,1*1*32,最后的输出层是五个分支,每个分支包含一个步长为1且采用same模型填充,卷积核尺寸分别是1*1*1的卷积层,最终的输出为300*400*1。6.根据权利要求1所述的人眼虹膜图像中虹膜区域自动分割方法,其特征在于,基于梯度向量流的主动轮廓模型的能量表达式如下所示:其中,c
′
(s)表示曲线c(s)的一阶导,c
″
(s)表示曲线c(s)的二阶导,α、β分别为一阶导与二阶导的参数,控制曲线的长度与曲率,e
gvf
为梯度向量流的施加在曲线上的外力,e
norm
为图像梯度在曲线法向上施加的外力,κ与n是控制e
gvf
和e
norm
的参数;其中,产生梯度向量流的梯度向量场的生成式如下所示:其中向量场v(x,y)=[u(x,y),v(x,y)],表示图像的梯度,而扩展版多层感知机预测的五个参数图即为v,α,β,κ,n。7.一种人眼虹膜图像中虹膜区域自动分割系统,其特征在于,包括如下单元:第一单元,其用于获取人眼虹膜图像数据集;第二单元,其用于对第一单元中获取的数据集进行预处理操作,以得到预处理数据集;第三单元:其用于对第二单元得到的预处理数据集输入训练好的深度卷积神经网络中;第四单元:将从第三单元中训练好的网络中提取骨干网卷积层的特征上采样到训练好的解码器中,得到每幅人眼虹膜图像中虹膜外圆区域的位置;第五单元:将从第三单元中训练好的网络中提取到的多个特征提取层的特征融合,然后输入到训练好的扩展版多层感知机中;利用扩展版多层感知机中预测得到的基于梯度向量流的主动轮廓模型的参数,由此拟合得到虹膜的内圆位置。8.根据权利要求7所述的人眼虹膜图像中虹膜区域自动分割系统,其特征在于,所述深度卷积神经网络包括顺次连接的简版的vggnet和上采样的解码器及扩展版的多层感知器。9.根据权利要求8所述的人眼虹膜图像中虹膜区域自动分割系统,其特征在于,所述简版的vggnet,网络结构如下:第一部分是输入层,其输入为300*400*3像素的矩阵;第二部分是特征抽取模块,共四个不同尺度的特征抽取层,每个特征抽取层包含有两个级联的卷积层,除去最后一个特征抽取层以外,其他每一层在最后均有最大池化层,取最
后一层的输出矩阵作为提取的特征c1、c2、c3、c4,其大小分别是150*200*64、75*100*128、38*50*256和38*50*512。10.根据权利要求8所述的人眼虹膜图像中虹膜区域自动分割系统,其特征在于,所述上采样的编码器对简版的vggnet输出的特征c1、c2、c3、c4进行特征融合,上采样的编码器的网络结构如下:第一层是在特征c4输出上的两层卷积层,其卷积核尺寸均为3*3*256,步长均为1,均使用same模式填充,第一层输出经过上采样后得到的输出矩阵为76*100*256,记为upsample_l;第二层是通道融合层,其将裁剪过的输出矩阵upsample_l和输出矩阵c3通过通道数融合,输出矩阵大小为75*100*512;第三层同样是两层卷积层,其卷积核尺寸分别为3*3*256和3*3*128,步长均为1,均使用same模式填充,第三层输出经过上采样后得到的输出矩阵为150*200*128,记为upsample_2;第四层是通道融合层,其将输出矩阵upsample_2和输出矩阵c2通过通道数融合,输出矩阵大小为150*200*256;第五层同样是两层卷积层,其卷积核尺寸分别为3*3*128和3*3*64,步长均为1,均使用same模式填充,该层输出经过上采样后得到的输出矩阵为300*400*64,记为upsample_3;第六层是通道融合层,其将输出矩阵upsample_3和输出矩阵c1通过通道数融合,输出矩阵大小为300*400*128;第七层同样是两层卷积层,其卷积核尺寸分别为3*3*64和3*3*32,步长均为1,均使用same模式填充,其输出矩阵300*400*32;第八层是卷积层,其卷积核尺寸为3*3*1,步长为1,第八层使用same模式填充,其输出矩阵的大小为300*400*1;所述扩展版的多层感知器将简版的vggnet输出的特征c1、c2、c3、c4通过通道数融合然后输入到网络中,扩展版的多层感知器的网络结构如下:整个扩展版的多层感知器共五层卷积层,步长均为1且均采用same模型填充,卷积核尺寸分别是1*1*512,1*1*256,1*1*128,1*1*64,1*1*32,最后的输出层是五个分支,每个分支包含一个步长为1且采用same模型填充,卷积核尺寸分别是1*1*1的卷积层,最终的输出为300*400*1。
技术总结
本发明公开了一种人眼虹膜图像中虹膜区域自动分割方法和系统,方法包括以下步骤:获取数据集,对获取的数据集进行预处理操作,以得到预处理数据集,将得到的预处理数据集输入训练好的深度卷积神经网络中,一方面通过从训练好的网络中提取的特征上采样到训练好的解码器中得到每幅人眼虹膜图像中虹膜外圆区域的位置,另一方面通过融合多个特征提取层的特征预测得到基于梯度向量流的主动轮廓模型的参数,由此拟合得到虹膜的内圆位置。本发明通过采用端到端的编码器
技术研发人员:孙哲南 王云龙 伍湘琼
受保护的技术使用者:天津中科智能识别产业技术研究院有限公司
技术研发日:2021.07.29
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。