1.本发明涉及智能人体工学椅,尤其涉及一种能够主动调节坐姿并锻炼骨盆和/或下背部肌肉的动感座椅。
背景技术:
2.座椅是工作、生活中的一种常见物品。对于大部分从事办公室类工作的人而言,每天均会有大量时间需要使用到座椅。目前,已有大量科学研究表面,长期久坐会对人的身体健康产生不利影响,尤其对于人的腰椎、颈椎、背部、盆骨等身体部位的健康,影响显著。原因在于,人在精神高度集中的工作过程中,倾向于长时间保持同一姿势而不运动或调整。
3.现有技术中存在一些动态座椅,如wo9916335,jp200552317,wo2019143555等专利文献中均公开了类似的动态座椅方案。这类动态座椅允许使用者在不离开座椅的情况下调整其坐姿,进而避免长时间保持相同的姿势。因而有利于改善久坐对身体产生的不利影响。但是这类动态座椅本质上均是通过非稳定性的座板结构实现动态功能,且需要依赖使用者自己主动运动调整身体重心来实现姿态的改变,例如使用者身体向左倾斜则可以使座板左倾等。但这种动态方案并不能给与使用者良好的用户体验,甚至用户体验较传统座椅更差。原因在于使用者通常会长时间保持同一坐姿专注工作而忘记主动运动,或由于任何一个无心的或下意识的身体重心改变均会导致座板的倾斜,从而导致使用者在没有心理准备的情况下被改变姿态,并产生座椅可能倾倒的错觉。因此,这类动态方案不能让使用者像使用传统座椅一样全身心的投入工作之中。
技术实现要素:
4.本发明针对上述现有的问题,提出一种动感座椅,本发明的动感座椅能够主动调节座椅的座板的运动方式,并通过座板的运动带动使用者运动,避免使用者长时间保持同一姿势不变;同时,本发明的动感座椅的调节过程对使用者的重心位置不敏感,因此,允许使用者能够像使用传统座椅一样,全身心的投入工作之中。
5.为了解决上述技术问题,本发明提出如下技术方案:
6.一种动感座椅,包括座椅本体和支撑柱,所述座椅本体至少包括座板,也可以包括椅背、扶手等常规部件,但需要指出的是,所述椅背和扶手在本发明的技术方案中并不是必须的,本发明所述的座椅也可以是仅包括座板和支撑柱的类似于凳子的形式,为便于表述,本发明中将其统称为座椅。
7.所述支撑柱用于支撑所述座板,其大体上呈柱状。其中,所述支撑柱集成有运动系统,所述运动系统能够通过局部旋转而使支撑柱弯曲并控制该弯曲的程度和方向,进而控制所述座板的倾斜程度和倾斜方向。
8.所述动感座椅还包括传感系统和控制系统。
9.所述传感器控制系统感测座椅底板上的肌力分布,并根据力分布的指示改变座椅倾斜。所述传感系统还能测量座板上与座板运动方向相反的力,该力实质上是人体对运动
的座板施加的抵抗力,以期望将座板重新带回期望的位置,例如水平位置,或使用者根据自身使用习惯而设置的座板位置,或根据程序的设定使座板倾斜或旋转到所预期的位置,本发明中将该位置称为设定位置。可选地,所述传感系统分布在座板底部、支撑柱底部或侧面、座椅扶手和/或座椅靠背。
10.控制系统可以控制所述运动系统以使座板执行预定的运动模式;从而使人体对座板的运动模式做出相应的抵抗反应。当抵抗力足够使座板回到设定位置时,座椅将提供反馈信号,所述反馈信号可以是振动、声音信号或其他信号手段。将座板带回到设定位置的抵抗力需要借助使用者的背部肌肉和骨盆肌肉。也就是说,使用者在抵抗座板的运动的过程中,会使自身的背部肌肉和盆骨肌肉得到锻炼。因此,通过辅以适当的控制程序,本发明的动感座椅的座板可以执行例如前后倾斜、侧向倾斜和旋转等多种运动模式,并相应的调动使用者的盆骨肌肉和/或下背部肌肉进行运动,达到按摩、拉伸相应肌肉群的效果。
11.所需的抵抗力量、座板的最大运动幅度和不同运动模式之间的时间间隔可由传感器系统检测到的用户活动模式决定。通过适当的算法来选择运动模式和抵抗力。所述动感座椅还可以提供独立于座位的锻炼活动。
12.本发明的动感座椅可以与手机、电脑等电子设备上的应用程序进行无线通信。该应用程序可以跟踪和传输传感器数据,得出活动模式、卡路里燃烧量、体重及其他健康参数。所述应用程序能够记录和/或分析处理所述健康参数,例如对不同时期的健康参数进行比较并绘制相应的参数曲线等;这些参数可以在社交媒体上共享。
13.所述支撑柱包括设在底部的支撑环和设在所述支撑环上的运动系统;所述运动系统包括与所述支撑环的顶部转动连接的下转环,与所述下转环的顶部转动连接的中转环,与所述中转环的顶部转动连接的上转环及与所述上转环顶部转动连接的座板。所述支撑环、下转环、中转环、上转环及座板之间通过内部设有轴承的轴承转动连接。
14.在一些实施方式中,所述各转环为具有连续壁面的管结构,所述连续壁面具有第一高度和第二高度,以使得转环下横截面的旋转轴线与上横截面的旋转轴线不重合;在另一些实施方式中,所述各转环由圆环结构与圆环结构底部周向均匀间隔设置的若干具有不同高度的支架构成,所述电机的输出轴连接至支架,实现转环的独立受控地转动。
15.优选的,所述下转环可以相对于支撑环受控转动;所述中转环可以相对于所述下转环受控转动,所述上转环可以相对于所述中转环受控转动,所述座板可以相对于所述上转环受控转动。所述受控转动由若干独立的驱动单元实现。
16.所述下转环、中转环、上转环与其底部连接断面的法向轴线之间均存在一个夹角,本发明中定义为断面夹角。当座板旋转至在某一平面内倾斜的角度为α时,所述下转环相对于支撑环轴线旋转角度为σ1,所述中转环相对于下转环与其连接面法向轴线旋转角度为σ2,所述上转环相对于中转环与其连接面法向轴线旋转角度为σ3。为了确保当座椅倾斜角度改变时,座椅使用者不会旋转,作为补偿,座板相对于上转环与其连接面法向轴线旋转角度为σ4。并且σ1、σ2、σ3、σ4满足如下公式1的关系:
[0017][0018]
其中的旋转显示为旋转向量,在笛卡尔坐标系中,α、β、γ分别为座板在不同方位方向上的倾斜或扭转角度。
[0019]
本发明可以通过传统的啮合齿轮或齿轮组传递扭矩和旋转,或通过具有高摩擦系数的滚动元件传递扭矩和旋转。优选的,所述驱动单元包括设在各转环、支撑环和座板上的齿圈和与所述齿圈相配合的电机组构成,所述电机组包括电机和齿轮或齿轮组,所述电机固定在与之匹配的齿圈下部转环或支撑环的内壁上或独立设置的电机支架上。所述齿圈的外壁与各转环、支撑环和座板的内壁固定连接。
[0020]
优选的,所述下转环、中转环和座板的底部均设有突出的驱动齿圈,所述中转环的顶部和所述上转环的底部则设有局部啮合的连接齿圈;所述驱动齿圈配合有由与其对应的电机驱动的齿轮或齿轮组,因而可以主动旋转;所述连接齿圈相互啮合,并用于传递旋转动力。
[0021]
或者,所有转环和座板的底部均设有突出的驱动齿圈,且所有驱动齿圈均具有与之匹配的电机组。其中,所述座板底部的电机仅用于执行座板的旋转运动。
[0022]
优选的,所述齿轮或齿轮组包括行星齿轮组、内齿轮、锥齿轮或其组合,所述电机的输出轴通过行星齿轮组的太阳齿轮、内齿轮或锥齿轮驱动与其连接的齿圈转动,从而带动齿圈所连接的转环转动。
[0023]
优选的,所述轴承设置在支撑环及各转环的顶部。
[0024]
优选的,所述齿圈的外径小于相应转环的外径,从而在各转环的底部形成突出于底部断面的细径部,该细颈部的外壁即为齿圈的外壁。
[0025]
优选的,上一级转环底部的齿圈的外壁与下一级转环或支撑环顶部的轴承内壁过盈配合。
[0026]
优选的,可以用具有一定摩擦系数的弹性元件替代所述齿圈实现传动,所述弹性元件优选为橡胶圈。
[0027]
优选的,为了补偿非同轴失调,在至少一个电机与所述转环之间还设置有万向节。所述万向节可以是本领域所已知的装配结构。
[0028]
优选的,所述传感系统设在上转环的顶部与所述座板之间;或进一步地,根据动感座椅应用场景的不同,在支撑环中、座椅扶手和/或椅背也设置传感系统。
[0029]
优选的,所述动感座椅还包括电源,所述电源用于向所述控制系统、传感系统及运动系统供应电能。
[0030]
优选的,各电机组的电机均为带有位置反馈信号的步进电机或伺服电机。
[0031]
应当理解的是,本发明中通过各转环的受控转动可使得所述支撑柱能够在一定角度范围内弯曲,且该弯曲的方向是任意的,例如,当所述支撑柱的支撑环被竖直放置时,通过控制上、中、下三个转环的转动方向和角度,可以使所述支撑柱的上端在水平维度朝向任一期望的方向弯曲任一期望的角度。从而可以驱动座板朝向任一期望的方向倾斜任一期望的角度,实现在任意平面内的倾斜。当座板连续执行在多个平面内倾斜至期望的角度的动作时,可实现座板在水平面上的起伏旋转。
[0032]
座板倾斜角度是转环第一高度和第二高度的落差形成的倾斜角度(θ)的4倍,例如,10度的转环倾斜角度(θ)可以使座板倾斜角度在0到40度之间;在另一实施方式中,通过选择22.5度的转环倾角(θ),可实现座板90度的倾斜角度。对于动态座椅而言,10度的转环倾角被认为是足够的,是一个实际限制,但这是一个软限制。为给予使用者良好的用户体验和安全性,优选所述座板的倾斜上限为40度。可以实现更高和更低的倾斜角度。对于特定的客户和应用,可以使用更大的角度。
[0033]
相比于现有技术,本发明的有益效果是:由于本发明中,各转环的转动是由电机驱动,因此,座板的倾斜方向和倾斜角度均是受控的,或者说座板的姿态不会因为使用者身体重心的变化而改变。这一特性允许使用者能够安心的使用本发明的动感座椅,而不至于因下意识的姿态变化而产生座椅可能倾倒的误判。另一方面,可通过在控制系统中的预设程序以一较缓慢的速度改变座板的倾斜程度和倾斜方向,从而按摩和拉伸使用者的盆骨和下背部肌肉,所述的缓慢速度允许使用者在不被打扰的情况下,自主,或下意识的适应座板姿态的改变,从而避免长期保持同一姿势,也同时避免因座板姿态改变带来的惊扰。当然,本发明的动感座椅也可以在使用者有充分心理准备的情况下,根据其发出的指令,例如加快座板倾斜程度的改变速度指令或对倾斜方向的旋转指令等,以一较快速度改变座板的倾斜程度和倾斜方向。
[0034]
本发明的动感座椅可应用于办公或家庭使用的人体工学椅,康复训练用途的座椅器械,模拟真实情境的游戏、影音娱乐或训练配套硬件设施。
[0035]
本发明的旋转支撑系统,除了应用于人体工学椅之外,还可用于电子设备、电器、展台、机器人手臂等多种适合的应用场景。
附图说明
[0036]
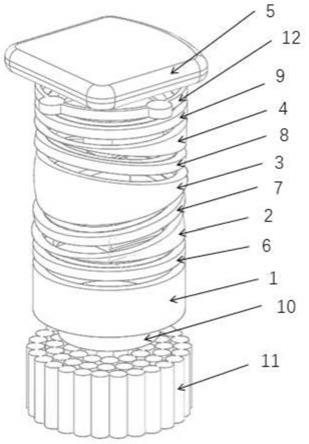
图1a为本发明支撑柱的结构示意。
[0037]
图1b为本发明支撑柱各转环旋转角度示意。
[0038]
图2为图1a中支撑柱的纵剖示意。
[0039]
图3为支撑柱竖直状态示意。
[0040]
图4为支撑柱弯曲状态示意。
[0041]
图5为支撑柱内部驱动结构的第一种实施方式示意。
[0042]
图6为支撑柱内部驱动结构的第二种实施方式示意。
[0043]
图7为支撑柱内部驱动结构的第三种实施方式示意。
[0044]
图8为支撑柱内部驱动结构的第四种实施方式示意。
[0045]
图9为支撑柱内部驱动结构的第五种实施方式示意。
[0046]
图10a、图10b为支撑柱内部驱动结构的第六种实施方式示意。
[0047]
图11为本发明座板实现旋转动作的示意。
[0048]
图12为动感座椅的倾斜模式和旋转模式及其带动盆骨或下背部肌肉运动的示意。
[0049]
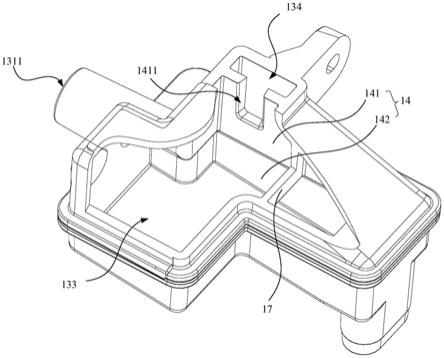
图中:1为支撑环,2为下转环,3为中转环,4为上转环,5为座板,6为第一轴承,7为第二轴承,8为第三轴承,9为第四轴承,10为控制系统,11为电源,12为传感系统;13为驱动单元;14为第一电机,15为第二电机,16,为第三电机,17为下驱动齿圈,18为中驱动齿圈,19为上驱动齿圈,20为下连接齿圈,21为上连接齿圈,22行星齿轮组,23为行星齿轮架,24为轴承套,25为支撑板,26为第四电机,27为齿轮,28为锥齿轮,29为第四驱动齿圈,30为万向节,31为支架,32为橡胶圈。
具体实施方式
[0050]
实施例1
[0051]
参见图1
‑
5,提供一种动感座椅,所述动感座椅包括座板(图中未示出)和支撑所述座板的支撑柱;所述支撑柱上集成有运动系统,所述运动系统能够使支撑柱局部旋转,从而使所述支撑柱定向和定角度的弯曲,进而带动所述座板实现定向和定角度的倾斜;运动系统还能够使所述座板定向和定角度的旋转。
[0052]
所述动感座椅还包括控制系统10和传感系统12,所述传感系统12能测量用户施加在座板的上与座板运动方向相反的抵抗力。所述控制系统10可以控制所述运动系统以使座板执行预定的运动模式;从而使人体对座板的运动模式做出相应的抵抗反应。通过辅以适当的控制程序,所述动感座椅的座板可以执行例如前后倾斜、侧向倾斜和旋转等多种运动模式,并相应的调动用户的盆骨肌肉和/或下背部肌肉进行运动,达到按摩、拉伸相应肌肉群的效果。
[0053]
所述动感座椅还包括通信系统,其用于实现所述动感座椅与手机、电脑等电子设备间的无线通信。所述电子设备上安装有相应的应用程序,所述应用程序可以跟踪和传输传感器数据,得出活动模式、卡路里燃烧量、体重及其他健康参数。所述应用程序还能够记录和/或分析处理所述健康参数,例如对不同时期的健康参数进行比较并绘制相应的参数曲线等;这些参数可以在社交媒体上共享。
[0054]
如图1
‑
3所示,所述支撑柱包括自下而上设置的支撑环1、第一轴承6、下转环2、第二轴承7、中转环3、第三轴承8、上转环4、第四轴承9和座板5;所述支撑柱内部设置有多个驱动单元13,下转环2、中转环3、上转环4分别对应有各自的驱动单元13,所述驱动单元能够驱动所述下转环2、中转环3、上转环4分别独立并相对与其相邻的转环转动,从而改变所述支撑柱的弯曲程度和弯曲方向。
[0055]
如图1b所示,当座板旋转至在某一平面内倾斜的角度为α时,所述下转环相对于支撑环轴线旋转角度为σ1,所述中转环相对于下转环与其连接面法向轴线旋转角度为σ2,所述上转环相对于中转环与其连接面法向轴线旋转旋转角度为σ3,座板相对于上转环与其连接面法向轴线旋转角度为σ4,并且σ1、σ2、σ3、σ4之间在转动时满足如上述公式1的关系。
[0056]
参见图5,所述下转环2的下端固定有下驱动齿圈17,所述中转环3的下端固定有中驱动齿圈18,所述座板5的下端固定有上驱动齿圈19;所述中转环3的上端固定有下连接齿圈20,所述上转环4的下端固定有上连接齿圈21;所述下连接齿圈20与所述上连接齿圈在某一点处相互啮合,因而当所述中转环3转动时,可以同时带动所述上转环4转动。
[0057]
所述下驱动齿圈17的外壁与所述第一轴承6的内壁过盈配合;所述中驱动齿圈18的外壁与第二轴承7的内壁过盈配合;所述上驱动齿圈19与第四轴承9的内壁过盈配合;所述上转环4的下端与第三轴承8过盈配合。所述第一至第四轴承的外壁均固定设置在轴承套24内,所述轴承套24与其下方的支撑环或转环上端固定连接。
[0058]
所述支撑环1的内壁通过支撑板25固定设有第一电机14,所述第一电机14的输出轴上固定设有太阳齿轮,所述太阳齿轮的外周设有若干连接所述太阳齿轮和所述下驱动齿圈17的行星齿轮,所述太阳齿轮与所述行星齿轮构成行星齿轮组22;每一转环所在层级单元具有独立设置的相同驱动方式的行星齿轮组22;所述上转环4的行星齿轮组22的上方设有用于固定所述行星齿轮的行星齿轮架23;所述下转环2的内壁通过该层级的支撑板25固定设有第二电机15,所述第二电机15通过行星齿轮组22与所述中驱动齿圈18驱动连接;所述上转环4的内壁通过该层级的支撑板25固定设有第三电机16,所述第三电机16通过行星齿轮组22与所述上驱动齿圈19驱动连接。
[0059]
所述座板5上还设有独立的振动马达,用于向用户提供振动按摩,所述振动马达与所述控制系统通信连接。
[0060]
实施例2
[0061]
参见图6,区别于实施例1的是,本实施例中,所述第一电机14、第二电机15和第三电机16采用贴靠侧壁的非居中固定方式,且其输出轴上固定设有直接连接相应内齿轮27,通过内齿轮驱动的方式带动齿圈及其对应的转环转动。
[0062]
实施例3
[0063]
参见图7,区别于实施例1和2的是,本实施例中,所述第一电机14、第二电机15和第三电机16采用贴靠侧壁的非居中固定方式,且所述第二电机15和第三电机16的输出轴与其对应转环的旋转轴线垂直;且所述第二电机15和第三电机16的输出轴上固定有与所述喇叭口状齿圈相匹配的锥齿轮28,第一电机14带动下驱动齿轮17驱动下转盘2旋转,第二电机15和第三电机16分别带动与之连接的锥齿轮28驱动中转环3和上转环4各自独立地旋转。
[0064]
实施例4
[0065]
参见图8,区别于实施例1
‑
3的是,本实施例中还包括第四电机26,且在所述上转环4的底部设置第四驱动齿圈29,并取消所述下连接齿圈20和上连接齿圈21。所述第四电机26的输出轴与所述第四驱动齿圈29通过锥齿轮28驱动连接。所述第四电机26用于座板的下表面与上转环4之间无法齿轮连接的情况下旋转上转环4。
[0066]
实施例5
[0067]
参见图9,在所述实施例3的基础上,为了补偿非同轴失调,在电机与所述转环之间还设置有万向节30。所述万向节30可以是本领域所已知的装配结构。
[0068]
实施例6
[0069]
参见图10a、图10b,区别于实施例1
‑
5的是,本事实例中的各转环结构为一圆环与其底部周向均匀间隔设置的若干具有不同高度的支架31构成,所述圆环底面设置具有一定摩擦系数的弹性元件,在本实施方式中所述弹性元件具体为橡胶圈32。以弹性元件替代齿圈,并以圆环与支架构成的转环结构替代具有连续壁面的转环结构,可以大幅降低加工成本和材料成本,并使座椅轻量化。
[0070]
实施例7
[0071]
如图11所示,当座板按照一定方位顺序连续执行在多个平面内倾斜至期望的角度的动作时,可实现座板在水平面上的起伏旋转。图11展示了一种示意的实施方式,中央水平位置为座板的默认初始位置,可先以图中实线箭头所示的方向运动,实现顺时针方向的旋转,也可以按图中虚线箭头所示的方向或本领域技术人员所知晓的其他可实施的方向运动,实现按设定的方式旋转。
[0072]
实施例8
[0073]
参见图12,本实施例提供一种采用前述实施例所述的动感座椅锻炼人体骨盆和下背部肌肉的方法,所述动感座椅在初始状态时,所述支撑柱1保持竖直不弯曲,且所述座板保持水平;当所述传感系统13感知到座板受压时,向控制系统10反馈该受压信号,所述控制系统10根据预先存储的用户信息,例如用户体重,习惯坐姿等,例如靠前座、靠后座、半躺座等;所述传感系统13可根据感知到的受压位置差异判断用户的坐姿;当受压信号与用户信息吻合时,控制系统10判断所述动感座椅进行使用状态,并等待接收用户指令,并开始计时;
[0074]
当接收到用户指令时,所述控制系统10根据指令发出向运动系统发出控制信号,所述运动系统根据该控制信号执行用户选择的运动模式;
[0075]
当计时超出预设等待时长,且未收到用户指令时,所述控制系统10判断用户已长时间保持相同坐姿,并根据预设程序,自动向运动系统发出控制信号,所述运动系统根据该控制信号执行预设的运动模式。
[0076]
所述运动模式包括前后倾斜、侧向倾斜和旋转等多种运动模式。
[0077]
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。