技术特征:
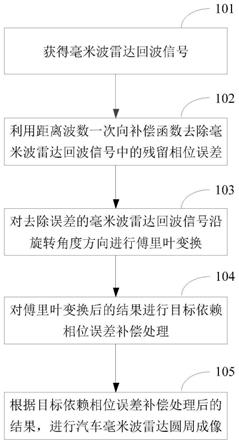
1.一种汽车毫米波雷达圆周成像方法,其特征在于,包括:获得毫米波雷达回波信号;利用距离波数一次向补偿函数去除毫米波雷达回波信号中的残留相位误差;对去除误差的毫米波雷达回波信号沿旋转角度方向进行傅里叶变换;对傅里叶变换后的结果进行目标依赖相位误差补偿处理;根据目标依赖相位误差补偿处理后的结果,进行汽车毫米波雷达圆周成像。2.如权利要求1所述的汽车毫米波雷达圆周成像方法,其特征在于,利用距离波数一次向补偿函数去除毫米波雷达回波信号中的残留相位误差,包括:根据参考斜距和距离向波数,构建距离波数一次向补偿函数;将距离波数一次向补偿函数和毫米波雷达回波信号相乘。3.如权利要求1所述的汽车毫米波雷达圆周成像方法,其特征在于,对去除误差的毫米波雷达回波信号沿旋转角度方向进行傅里叶变换,包括:确定所述去除误差的毫米波雷达回波信号的相位;根据所述去除误差的毫米波雷达回波信号的相位对旋转角度进行求导,确定旋转向波数;根据雷达与目标及旋转中心之间的几何关系和旋转向波数,确定傅里叶变换后的结果。4.如权利要求1所述的汽车毫米波雷达圆周成像方法,其特征在于,根据目标依赖相位误差补偿处理后的结果,进行汽车毫米波雷达圆周成像,包括:对目标依赖相位误差补偿处理后的结果沿距离方向进行逆傅里叶变换;对逆傅里叶变换的结果沿旋转角度方向进行逆傅里叶变换,得到极坐标聚焦结果;对所述极坐标聚焦结果进行插值处理,得到二维空间坐标成像结果。5.一种汽车毫米波雷达圆周成像装置,其特征在于,包括:信号获得模块,用于获得毫米波雷达回波信号;误差去除模块,用于利用距离波数一次向补偿函数去除毫米波雷达回波信号中的残留相位误差;傅里叶变换模块,用于对去除误差的毫米波雷达回波信号沿旋转角度方向进行傅里叶变换;误差补偿模块,用于对傅里叶变换后的结果进行目标依赖相位误差补偿处理;圆周成像模块,用于根据目标依赖相位误差补偿处理后的结果,进行汽车毫米波雷达圆周成像。6.如权利要求5所述的汽车毫米波雷达圆周成像装置,其特征在于,所述误差去除模块进一步用于:根据参考斜距和距离向波数,构建距离波数一次向补偿函数;将距离波数一次向补偿函数和毫米波雷达回波信号相乘。7.如权利要求5所述的汽车毫米波雷达圆周成像装置,其特征在于,所述傅里叶变换模块进一步用于:确定所述去除误差的毫米波雷达回波信号的相位;根据所述去除误差的毫米波雷达回波信号的相位对旋转角度进行求导,确定旋转向波
数;根据雷达与目标及旋转中心之间的几何关系和旋转向波数,确定傅里叶变换后的结果。8.如权利要求5所述的汽车毫米波雷达圆周成像装置,其特征在于,所述圆周成像模块进一步用于:对目标依赖相位误差补偿处理后的结果沿距离方向进行逆傅里叶变换;对逆傅里叶变换的结果沿旋转角度方向进行逆傅里叶变换,得到极坐标聚焦结果;对所述极坐标聚焦结果进行插值处理,得到二维空间坐标成像结果。9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至4任一所述方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有执行权利要求1至4任一所述方法的计算机程序。
技术总结
本发明公开了一种汽车毫米波雷达圆周成像方法及装置,其中方法包括:获得毫米波雷达回波信号;利用距离波数一次向补偿函数去除毫米波雷达回波信号中的残留相位误差;对去除误差的毫米波雷达回波信号沿旋转角度方向进行傅里叶变换;对傅里叶变换后的结果进行目标依赖相位误差补偿处理;根据目标依赖相位误差补偿处理后的结果,进行汽车毫米波雷达圆周成像。本发明可以进行汽车毫米波雷达圆周成像,提高成像准确性,保证行车安全。保证行车安全。保证行车安全。
技术研发人员:张远
受保护的技术使用者:张远
技术研发日:2021.09.15
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。