1.本发明属于直升机照明领域,具体涉及一种直升机搜索灯系统。
背景技术:
2.直升机搜索灯是救援直升机重要的选装设备,在直升机执行夜间 和不良目视条件下救援时,搜索灯可以照射目标区,提供必要的、充 足的照明,使机上人员容易发现被搜索对象,被救人员也容易发现直 升机而发出求救信号。直升机通常采用可移动的灯来改变光的方向, 用于探测直升机的环境。普通灯单元具有灯头,灯头包括光源并安装 在臂状结构的远端上,臂状结构远离直升机机身延伸。这样的灯单 元具有用于倾斜臂状结构的马达和用于旋转灯头的马达,但这样的普 通轻单元的结构是庞大和笨重的。当移动灯头时,特别是在不利的条 件下,例如在冰雪或刮风的条件下或高速运行的条件下,难以实现快 速的反应。
3.cn108758510a公开了一种直升机悬浮矿区高空照明灯,在矿区 外围的高地上锚固拉线,拉线上端固定在灯盘上,在灯盘下部装有 led照明灯,在太阳能灯盘上部固定直升机,在直升机上装有螺旋 桨,但该方案照明灯的位置、高度均被限制,难以满足搜索的需要。 cn209956239u公开了一种无人机高空搜索灯,包括机壳、安装板、 固定管、承接杆、插接杆、安装件、卡接弹簧、卡块、固定环、辅助 块、卡接件、连接板、固定块、连接杆、探头、安装杆、安装头、扇 叶和承重架,通过探头能有效对地面目标进行侦查,提升夜间搜索光 线,使得无人机能有效搜索到地面目标。但该结构方式固定,不合适 高速高强度飞机的搜索。cn209371011u公开了一种led搜索灯, 包括底座组件和灯头组件,所述底座组件包括座体和位于所述座体内 的第一驱动机构,所述第一驱动机构包括第一电机、第一锥齿轮、第 一蜗杆、第一蜗轮以及第一输出轴,所述第一锥齿轮连接于所述第一 电机上,所述第一蜗杆一端设置有与所述第一锥齿轮啮合的第一配合 锥齿轮,所述第一蜗轮与所述第一蜗杆啮合,所述第一输出轴一端连 接在所述第一蜗轮上,另一端沿纵向延伸出所述座体;所述灯头组件 包括连接在所述第一输出轴上的灯头支架以及可转动地支撑于所述 灯头支架的壳体,所述灯头支架内设置有第二驱动机构,所述第二驱 动机构包括第二电机、第二锥齿轮、第二蜗杆、第二蜗轮以及第二输 出轴,所述第二锥齿轮连接于所述第二电机上,所述第二蜗杆一端设 置有与所述第二锥齿轮啮合的第二配合锥齿轮,所述第二蜗轮与所述 第二蜗杆啮合,所述第二输出轴连接在所述第二蜗轮上并与所述壳体 连接,所述第二蜗轮能够带动所述壳体在俯仰方向相对于所述灯头支 架转动。但是该结构俯仰调节角度有限,照明搜索范围有限。
4.因此,现有技术中的直升机搜索灯存在操作不便、照明范围较小、 难以调整的技术问题,难以应对越来越复杂的搜救任务。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种直升机搜索灯系统,便于 使用者操作,并
具有较大的照明范围,且照明范围易于调整。同时具 有稳定、可靠的抗风、抗振性能。
6.本发明的技术方案如下:
7.一种直升机搜索灯系统,包括安装在直升机驾驶舱内的搜索灯控 制盒1、第一分离插座2、第二分离插座3、电缆线以及安装在直升机 机身前端的搜索灯4;
8.其中,所述的搜索灯控制盒1通过电缆线依次连接第一分离插座2、 第二分离插座3和搜索灯4;
9.所述的搜索灯控制盒1具有手动模式和随动模式。在手动模式下, 搜索灯控制盒1实现搜索灯4的开与关、搜索灯上下俯仰运动、搜索灯 水平转动、光斑大小调节、正常模式与隐蔽模式切换以及复位动作。 在随动模式下,搜索灯控制盒1通过机载联动装置使得搜索灯4能根据 机上设备送来的角度信息进行随动控制;其中,角度精度为
±
0.5
°ꢀ
以实现搜索灯的精确角度控制。所述的搜索灯在接收到控制盒送来的
ꢀ“
复位”信号时,灯能自动恢复到俯仰、旋转为0
°
角的位置,左右 不能转动。
10.所述的第一分离插座2用于舱内普通电缆与搜索灯控制盒螺旋电 缆的分离。
11.所述的第二分离插座3用于舱内、舱外电缆的分离。
12.所述的搜索灯4包括安装装置41和光学系统42;所述的安装装置 41包括减振结构411、俯仰模块412、转动模块413,所述的搜索灯通 过减振结构与直升机机身前端连接;所述的光学系统42包括灯具壳体 421、光学组件422和调焦结构423。
13.优选的,所述的减振结构411为金属橡胶减振器。所述的金属橡 胶减振器既有橡胶的多向减振、大阻尼等优点,也有金属的高环境适 应性等优点。
14.优选的,所述的金属橡胶减振器为4个。所述的金属橡胶减振器 的固有频率为7.5hz,对搜索的减振效果可以达到95%左右。
15.优选的,所述的俯仰模块412包括俯仰电动机,所述的俯仰电动 机根据输入脉冲数量以及脉冲频率来控制搜索灯的俯仰角度与俯仰 速度。
16.优选的,所述的俯仰电动机优选为伺服电机。所述的俯仰电动机 的额定功率不大于85w;俯仰角度为( 10
‑
20
)
°
~(
‑
90
‑
20
)
°
;俯仰 角速度为每秒(10
±
1)
°
。
17.优选的,所述的转动模块413包括旋转电动机,所述的旋转电动 机的额定功率不大于85w;旋转角度为向左或向右旋转180
°
;旋转角 速度为每秒(12
±
1)
°
。
18.优选的,所述的光学组件422包括若干个光源4221和对应的若干 个透镜4222,光源4221位于对应的透镜4222内。
19.优选的,所述的光源4221为激光光源,最小出光角度能做到0.5
°
, 远距离照射的优势非常明显,适合做搜索照明。
20.优选的,所述的光源4221采用双光光源,集成白激光与红外激光 芯片。
21.优选的,所述的光源数量为38颗;每颗包含20w白激光与0.5w的 红外激光。优选的,单颗白激光光通量可达到1000lm以上。
22.优选的,所述的光源4221为两组光源,一组光源为主光源,另 一组光源为辅助光源。优选的,两组光源采用相同的配光技术。主光 源可进行光束角调节,辅助光源为固定光束角,用来补光;当需要小 角度搜索的时候,辅助光源用来增加光斑边缘的照度/辐射强度,当 需要大角度搜索的时候,辅助光源用来增强光斑中心的照度/辐射强 度,这样能提高照明效果,从而提高搜索效率。采用两组光源设计还 能有效分散热源,比一组光源散热
效果好,从而提高光源的寿命。
23.优选的,所述的透镜4222为复眼透镜(即蝇眼透镜),复眼透镜 极大的提高了光能利用率以及光斑的均匀度。
24.优选的,所述的透镜4222为两排复眼透镜阵列,第一排复眼透 镜将每个光源形成多个光源像进行照明,第二排复眼透镜的每个小透 镜将第一排复眼透镜对应的小透镜重叠成像于照明面上;第一排复眼 透镜将光源的整个宽光束分为多个细光束照明,且每个细光束范围内 的垂轴不均匀性由于处于对称位置细光束的相互叠加,使细光束的垂 轴不均匀性获得补偿,从而使整个孔径内的光能量得到有效均匀的利 用。焦点处照明屏上光斑的每一点均受到光源所有点发出的光线照射, 同时,光源上每一点发出的光束又都交会重叠到照明光斑上的同一视 场范围内,所以得到一个均匀的光斑。
25.经过复眼透镜处理的光线再经过光阑,以及调焦透镜,就能得到 不同角度的光斑。正常模式4
°
角中心光强达到32000000cd,10%的 峰值之间的光强角为5
°
,20
°
角中心光强达到2500000cd,10%的峰 值之间的光强角为25
°
,隐蔽模式4
°
角中心辐射强度达到280w/sr, 10%的中心辐射强度夹角为5
°
,20
°
角中心辐射强度达到110w/sr, 10%的中心辐射强度夹角为23
°
,所以正常模式与隐蔽模式都满足给 定的要求。
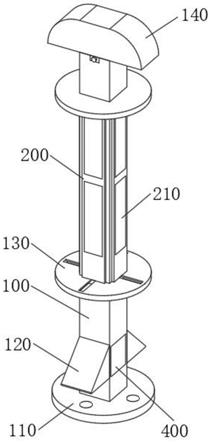
26.优选的,所述的调焦结构423包括调焦筒4231、微型直流电机4232 和动齿盘4233;所述的透镜4222完全包裹于调焦筒4231内。
27.优选的,所述的调焦结构423为螺旋结构调焦,精度高,设计整 体性好,运行平稳,抗振性能好。
28.优选的,所述的微型直流电机4232带动齿盘4233旋转,齿盘上有 销柱4234,通过销柱的旋转带动透镜固定筒的旋转,透镜固定筒与销 柱以导槽的方式配合;这样微型直流电机的旋转运动转换成透镜固定 筒的直线运动,实现调焦功能。这种调焦结构,配合间隙小,调焦过 程稳定。
29.本发明的直升机搜索灯系统取得了显著的技术效果:
30.本发明的一种直升机搜索灯系统便于使用者操作,并具有较大的 照明范围,且照明范围易于调整。本发明的直升机搜索灯系统通过搜 索灯控制盒便于控制精确控制上下俯仰、左右旋转的角度和速度,显 著扩大了照明范围,照明精度高,便于使用者开展救援搜索。
31.同时本发明搜索灯系统能够在直升机在320km/h高速下飞行,不 同角度下搜索仍能保持稳定操作,且对飞机振动具有可靠、稳定的抗 振动性能。
附图说明
32.图1本发明的直升机搜索灯系统的示意图。
33.图2本发明的搜索灯示意图。
34.图3本发明的安装装置示意图。
35.图4本发明的光学系统示意图。
36.图5本发明的调焦结构示意图。
37.图6本发明搜索灯4
°
角光斑图。
38.图7本发明搜索灯20
°
角光斑图。
39.图8本发明振动环境试验谱示意图。
具体实施方式
40.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显 然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施 例。基于本发明中的实施例,本领域普通技术人员经改进或润饰的所 有其它实例,都属于本发明保护的范围。应理解,本发明实施例仅用 于说明本发明的技术效果,而非用于限制本发明的保护范围。实施例 中,所用方法如无特别说明,均为常规方法。
41.实施例1
42.一种直升机搜索灯系统,包括安装在直升机驾驶舱内的搜索灯控 制盒1、第一分离插座2、第二分离插座3、电缆线以及安装在直升机 机身前端的搜索灯4;其中,所述的搜索灯控制盒1通过电缆线依次连 接第一分离插座2、第二分离插座3和搜索灯4;
43.本发明中,所述的搜索灯控制盒1具有手动模式和随动模式。在 手动模式下,搜索灯控制盒1实现搜索灯4的开与关、搜索灯上下俯仰 运动、搜索灯水平转动、光斑大小调节、正常模式与隐蔽模式切换以 及复位动作。在随动模式下,搜索灯控制盒1通过机载联动装置使得 搜索灯4能根据机上设备送来的角度信息进行随动控制;其中,角度 精度为
±
0.5
°
以实现搜索灯的精确角度控制。所述的搜索灯在接收 到控制盒送来的“复位”信号时,灯能自动恢复到俯仰、旋转为0
°ꢀ
角的位置,左右不能转动。
44.本发明中,所述的第一分离插座2用于舱内普通电缆与搜索灯控 制盒螺旋电缆的分离。所述的第二分离插座3用于舱内、舱外电缆的 分离。
45.本发明中,所述的搜索灯4包括安装装置41和光学系统42;所述 的安装装置41包括减振结构411、俯仰模块412、转动模块413,所述 的搜索灯通过减振结构与直升机机身前端连接;所述的光学系统42 包括灯具壳体421、光学组件422和调焦结构423。
46.本发明中,所述的减振结构411为金属橡胶减振器。所述的金属 橡胶减振器既有橡胶的多向减振、大阻尼等优点,也有金属的高环境 适应性等优点。所述的金属橡胶减振器为4个。所述的金属橡胶减振 器的固有频率为7.5hz,对搜索的减振效果可以达到95%左右。
47.本发明中,所述的俯仰模块412包括俯仰电动机,所述的俯仰电 动机根据输入脉冲数量以及脉冲频率来控制搜索灯的俯仰角度与俯 仰速度。所述的俯仰电动机优选为伺服电机。所述的俯仰电动机的额 定功率不大于85w;俯仰角度为( 10
‑
20
)
°
~(
‑
90
‑
20
)
°
;俯仰角速 度为每秒(10
±
1)
°
。
48.本发明中,所述的转动模块413包括旋转电动机,所述的旋转电 动机的额定功率不大于85w;旋转角度为向左或向右旋转180
°
;旋转 角速度为每秒(12
±
1)
°
。
49.本发明中,所述的光学组件422包括若干个光源4221和对应的若 干个透镜4222,光源4221位于对应的透镜4222内。所述的光源4221 为激光光源,最小出光角度能做到0.5
°
,远距离照射的优势非常明 显,适合做搜索照明。所述的光源4221采用双光光源,集成白激光与 红外激光芯片。所述的光源数量为38颗;每颗包含20w白激光与0.5w 的红外激光。优选的,单颗白激光光通量可达到1000lm以上。
50.本发明中,所述的光源4221为两组光源,一组光源为主光源,另 一组光源为辅助
光源。优选的,两组光源采用相同的配光技术。主光 源可进行光束角调节,辅助光源为固定光束角,用来补光;当需要小 角度搜索的时候,辅助光源用来增加光斑边缘的照度/辐射强度,当 需要大角度搜索的时候,辅助光源用来增强光斑中心的照度/辐射强 度,这样能提高照明效果,从而提高搜索效率。采用两组光源设计还 能有效分散热源,比一组光源散热效果好,从而提高光源的寿命。
51.本发明中,所述的透镜4222为复眼透镜(即蝇眼透镜),复眼透 镜极大的提高了光能利用率以及光斑的均匀度。所述的透镜4222为两 排复眼透镜阵列,第一排复眼透镜将每个光源形成多个光源像进行照 明,第二排复眼透镜的每个小透镜将第一排复眼透镜对应的小透镜重 叠成像于照明面上;第一排复眼透镜将光源的整个宽光束分为多个细 光束照明,且每个细光束范围内的垂轴不均匀性由于处于对称位置细 光束的相互叠加,使细光束的垂轴不均匀性获得补偿,从而使整个孔 径内的光能量得到有效均匀的利用。焦点处照明屏上光斑的每一点均 受到光源所有点发出的光线照射,同时,光源上每一点发出的光束又 都交会重叠到照明光斑上的同一视场范围内,所以得到一个均匀的光 斑。经过复眼透镜处理的光线再经过光阑,以及调焦透镜,就能得到 不同角度的光斑。正常模式与隐蔽模式都满足给定的要求。
52.本发明中,所述的调焦结构423包括调焦筒4231、微型直流电机 4232和动齿盘4233;所述的透镜4222完全包裹于调焦筒4231内。所述 的调焦结构423为螺旋结构调焦,精度高,设计整体性好,运行平稳, 抗振性能好。所述的微型直流电机4232带动齿盘旋转4233,齿盘上有 销柱4234,通过销柱的旋转带动透镜固定筒的旋转,透镜固定筒与销 柱以导槽的方式配合;这样微型直流电机的旋转运动转换成透镜固定 筒的直线运动,实现调焦功能。这种调焦结构,配合间隙小,调焦过 程稳定。
53.本发明的直升机搜索灯系统通过搜索灯控制盒便于控制精确控 制上下俯仰、左右旋转的角度和速度,显著扩大了照明范围,照明精 度高,便于使用者开展救援搜索。
54.实验例1不同角度光斑实验
55.通过实测,正常模式4
°
角中心光强达到32000000cd,10%的峰 值之间的光强角为5
°
,20
°
角中心光强达到2500000cd,10%的峰 值之间的光强角为25
°
,隐蔽模式4
°
角中心辐射强度达到280w/sr, 10%的中心辐射强度夹角为5
°
,20
°
角中心辐射强度达到110w/sr, 10%的中心辐射强度夹角为23
°
,所以正常模式与隐蔽模式都满足给 定的要求。4
°
角光斑图见图6,20
°
角光斑图见图7。
56.实验例2抗风载能力可行性分析
57.(1)表面变形量分析
58.当飞机速度为320公里/小时的时候,根据柏努利方程式:
59.wp=0.5
·
ro
·
v260.其中:ro
‑
空气密度
61.v
‑
风速
62.可以计算出搜索灯受到的风压:wp=5096(pa)
63.经计算搜索灯处于俯仰
‑
90
°
照射时迎风面积处于最大,搜索灯的 最大迎风面积为:s迎风=0.193m2;
64.由此可以计算出搜索灯在飞行速度为320公里/小时的时候,承受 的风的阻力为:
65.f风=wp
×
s迎风=5096
×
0.193=983.528n。
66.通过受力分析得知表面变形量小于0.5mm。
67.(2)迎风操作搜索灯分析
68.在灯具迎风操作时,经过分析俯仰电机所受风阻最大;
69.并且当搜索灯处于俯仰
‑
90
°
时,此时要克服的风阻最大;
70.此时操作搜索灯时,灯体绕着电机轴转动,此时灯体总的迎风面 积为0.125m2,但是此时转动轴上半部分迎风面积0.053m2与转动轴 下半部分迎风面积0.053m2所产生的风阻在转动过程中相互抵消,剩 余0.019m2为转动需要克服的风阻。根据风阻迎风面积为0.019m2, 按照上述公式技术可得:
71.f风=wp
×
s迎风=5096
×
0.019=96.824n;
72.风阻力矩为208.8mm,即0.208m;
73.风阻产生的力矩m风=f风
×
l风=96.824nx0.28m=20.14nm
74.由于搜索灯将重心居中设计,搜索灯自重产生的力矩约为0
75.电机的扭力力矩,m扭力=44.8nm;
76.由于44.8nm>20.14 0即m扭力>m风 m灯;
77.因此,本发明搜索灯结构设计能够满足飞机飞行速度为320公里/ 小时对搜索灯的各项操作。
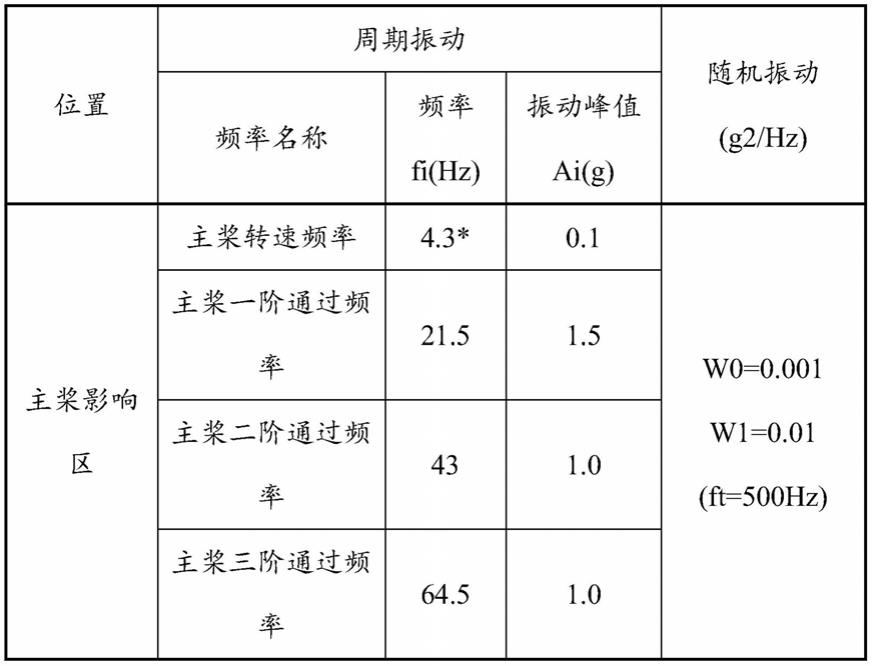
78.实验例3抗振动实验
79.进行使用振动试验,主要考察产品所处振动影响区:搜索灯控制 盒、搜索灯、分离插座1、分离插座2、电缆位于主桨影响区。振动 试验量值按表1:
80.表1振动试验量值
81.82.振动环境试验谱图如图8所示。
83.1)振动功能试验:
84.i.试验方向:产品x、y、z三个轴向;
85.ii.试验时间:每轴向1h。
86.2)振动耐久试验
87.i.试验方向:产品x、y、z三个轴向;
88.ii.试验时间:每轴向4.8h。
89.实验结果表明,通过本发明结构设计让灯具的本振频率避开飞机 影响区的振动主频率,避免在使用的时候产生共振,本发明搜索灯系 统的满足飞机振动环境的需求,使系统运行更加可靠稳定。
90.以上所述的仅是本发明的优选实施方式,应当指出,对于本技术领域 的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若 干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。