基于dct变换无次级路径建模有源噪声控制方法
一.技术领域
1.本发明涉及无次级路径建模的有源控制方法,针对高采样率系统中窄带噪声提出了一种基于dct变换的无次级路径建模有源控制方法。
二.
背景技术:
2.大多有源控制方法需要获取次级声源和误差传声器之间传递函数信息,即次级路径建模。前馈有源控制算法常采用滤波最小均方(fxlms)算法,当真实次级路径传递函数和建模次级路径传递函数之间误差较大时,fxlms算法可能不稳定。gao等(m.gao,j.lu and x.qiu,“asimplified subband anc algorithm without secondary path modeling,”ieee/acm trans.on audio, speech,and language processing,vol.24,pp:1164
‑
1174,2017)定义代价函数为各子带误差信号模平方之和,在时域直接更新全带自适应滤波器系数。将参考信号通过直达声时延产生时延参考信号,同时,将参考信号经由希尔伯特滤波器产生正交时延参考信号,在时域实现子带内0
°
,180
°
或
±
90
°
四个方向搜索最佳更新方向。由于直达声时延补偿部分次级路径脉冲响应,只需通过搜索两类子带参考信号最佳更新方向近似残余次级路径脉冲响应相位信息,故减少子带个数,缩短搜索过程占用时间。然而,该算法需要采用多项fft方法获取子带信号信息。
3.中国专利zl201410114263.5公开一种简化无次级路径建模的有源控制方法,该方法在时域实施,通过希尔伯特滤波器产生正交时延参考信号和时延参考信号一起在0
°
,180
°
两个方向搜索最佳更新方向,时域实现
±
90
°
两个搜索方向,且以估计直达声时延补偿次级路径信息,减少子带个数,结构简单。然而该方法需要通过多相fft方法获取子带信号信息,当在高采样率有源控制系统中,参考信号为窄带噪声时,参考信号频率范围内有效频率柜较少,该方法提取子带信号会较为复杂,且对如何直接提取参考信号和误差信号有效频率柜信息,并用一个频率柜相位和幅度信息近似周围频率点相应信息并未提及。
4.ahmed和rao给出离散余弦变换(discrete cosine transform,dct)定义,是一种常用的实数变换。分析dct变换和dft变换之间关系,dct可以看做是有限长序列经过偶对称周期延拓后的傅里叶级数展开系数。dct变换是正交变换,可实现自适应滤波相关算法。据此,本方法在dct域块自适应滤波理论基础上,提出一种基于dct变换的无次级路径建模有源噪声控制方法。该方法分析dct域频率柜对应频率与dct变换长度之间的关系,在各频率柜信息独立的前提下,提取参考信号和误差信号频率柜信息。与dft域不同,信号在每个频点的信息由两个频率柜信息共同组成。基于这一点,分析dct域次级路径、直达声时延和残余次级路径之间关系,以及残余次级路径特性,并在实数变换域选择0
°
或180
°
两个方向,作为相应频率柜最佳滤波器系数更新方向,并在此基础上直接更新时域自适应滤波器系数,由于dct变换是实数变换,进一步优化进算量。
三.
技术实现要素:
5.1.发明目的:提出一种基于dct变换的无次级路径建模有源噪声控制方法。在独立
频率柜信息的前提下,通过dct变换提取窄带信号有效频率柜信息,并在实数变换域选择0
°
或180
°
两个方向,作为相应频率柜最佳滤波器系数更新方向,并在此基础上直接更新时域自适应滤波器系数,由于dct变换是实数变换,进一步优化进算量。
6.2.技术方案
7.本发明的目的通过以下技术方案实现一种基于dct变换的无次级路径建模有源控制方法,其步骤为:
8.(1)计算实验中所用电路板电时延τ1=q/f
s
,其中f
s
为采样频率,q为参考信号从控制器参考信号输入端到控制信号输出端延迟的采样点数。
9.(2)计算实验中声时延τ2,计算公式为τ2=l/c,其中,l为次级声源与误差传感器之间的距离, c为声速,一般环境中取340m/s。
10.(3)基于步骤(1)电时延τ1和步骤(2)声时延τ2,计算总的时延τ=τ1 τ2,总时延对应直达声时延点数为δ,计算公式为δ=τf
s
,其中f
s
为采样频率。
11.(4)产生时延修正参考信号
12.时延修正参考信号r(n)为参考信号x(n)经由纯时延滤波器z
‑
δ
滤波得到,计算公式为r(n)= x(n
‑
δ),其中δ为估计次级路径直达声时延采样点数。
13.(5)提取dct域时延修正参考信号和误差信号有效频率柜信息
14.dct域时延参考信号d(k)第i个频率柜d(i)可通过idct展开,采用同样的方法可得到第i个误差信号频率柜e(i),计算公式分别为:
[0015][0016][0017]
式中,j为虚数单位,l和α与自适应滤波器长度n有关。
[0018]
(6)子频率柜组更新方向的选择
[0019]
步骤1.不更新自适应滤波器系数,分别计算第t个频率柜组时延参考信号噪声能量χ1、误差信号能量ξ1以及最大误差幅度e
max
,计算公式:
[0020][0020][0021]
e
max
=max[|e
m
(k)|]
[0022]
步骤2.分别从μ,
‑
μ两个方向中搜索每个频率柜组最佳更新方向,重复下面步骤,寻找合适更新方向。
[0023]
a.采用式(1)更新自适应滤波器系数,计算p个采样点的频率柜组参考信号能量χ2和误差信号能量ξ2,如果|e
m
(k)|>(1 δ)e
max
,停止更新。
[0024]
b.如果|e
m
(k)|<(1 δ)e
max
,采用式(1)更新自适应滤波器系数。
[0025][0026]
式中,μ(m)为步长,且为1和
‑
1,分别对应0
°
和180
°
两种不同更新方向。
[0027]
步骤3.如果满足|e
m
(k)|>(1 δ)e
max
或ξ2/χ2>δ1ξ1/χ1、其中δ<1,δ1<1,则跳转至步骤5;
[0028]
步骤4.若μ
m
=μ和
‑
μ,都满足|e
m
(k)|>(1 δ)e
max
或ξ2/χ2>δ1ξ1/χ1,则μ
m
=μ
m
α,α<1,并返回步骤(1);否则,μ
m
=μ
m
/α,并返回步骤(1);
[0029]
步骤5.重复执行步骤1至步骤4,直至m=m
‑
1;
[0030]
(7)所有频率柜组搜索最佳更新方向后,一起调整全带自适应滤波器系数,直至误差降低达到稳态,更新全带自适应滤波器w(z)系数采用如下迭代公式:
[0031][0032]
式中,t为频率柜组个数,μ(m)为步长,且为1和
‑
1,分别对应0
°
和 180
°
两种不同更新方向。每个子频率柜组初始更新方向为0
°
方向。
[0033]
3.有益效果
[0034]
本发明与现有技术相比,其显著优点:(1)通过dct方法提取出参考信号、误差信号和相应次级路径有效频率柜信息。(2)无需次级路径建模,由于dct是实数变换,每个子频率柜组在0
°
和180
°
两个方向切换,搜索相应子频率柜组最佳更新方向,调整全带自适应滤波器系数。(3)针对高采样率窄带噪声有源噪声控制系统,可在实数域提取频率范围内参考信号和误差信号有效频率柜信息,系统结构简单,易于实现,进一步减少计算量。
四.具体实施方式
[0035]
下面以两端端口均封闭的管道声场中实现简化窄带无次级路径建模有源控制方法为例,对该方法的具体实施方式做详细说明。
[0036]
1.系统构成
[0037]
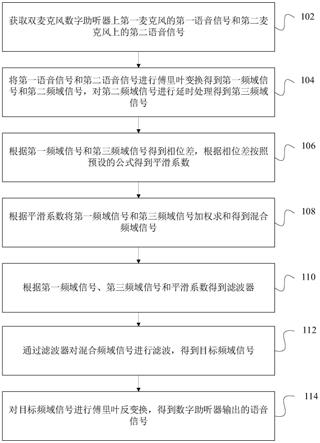
实验装置是端口直径为17cm的方形直管道,管道两端端口封闭,误差传声器位于次级声源的下游管道中,初级声源置于次级声源的上游管道中,测得初级声源与误差传声器之间的距离为136cm,次级声源与误差传声器之间的距离l为40cm。假设系统采样频率为16000 hz。图1为简化窄带无次级路径建模有源控制方法框图,x(n)为100hz~200hz的带限信号,误差传感器用于获取误差信号e(n)。
[0038]
2.实施过程
[0039]
(1)将控制器的输入端口和输出端口短接,以白噪声作为控制器的输入信号,采用lms算法,测得控制器从输入端到输出端延迟采样点数。如ad21161评估板,降采样后,采样频率为 2000hz,测得控制器从输入端到输出端共延迟13个采样点,可得控制器电时延τ1为6.5ms。
[0040]
(2)计算实验中声时延τ2,计算公式为τ2=l/c,其中l为次级声源与误差传感器之间的距离,c 为声速,一般环境中取340m/s。例如次级声源与误差传感器之间的距离l为
40cm,计算声时延τ2近似为1.2ms。
[0041]
(3)基于步骤(1)电路板电时延τ1和步骤(2)声时延τ2,计算总的时延τ=τ1 τ2,直达声时延δ=τf
s
, f
s
为采样频率。例如控制器电时延τ1为6.5ms,τ2近似为1.2ms,计算总时延τ为7.7ms,f
s
为2000hz,对应的直达声时延δ为15。
[0042]
(4)产生时延修正参考信号
[0043]
时延修正参考信号r(n)为参考信号x(n)经由纯时延滤波器z
‑
δ
滤波得到,计算公式为r(n)= x(n
‑
δ),其中δ为估计次级路径直达声时延采样点数。
[0044]
(5)提取参考信号和误差信号频率柜信息
[0045]
dct域时延参考信号d(k)第i个频率柜d(i)可通过idct展开,采用同样的方法可得到第i个误差信号频率柜e(i),其第i个频率柜对应的频率为f
i
,计算公式分别为:
[0046][0047][0048]
f
i
=(i
‑
1)
×
f
s
/2n
[0049]
式中,j为虚数单位。例如系统采样频率f
s
为16000hz,自适应滤波器长度n为512,参考信号频率为300hz。在dct域每个频率的信息由两个频率柜共同组成,分别为第68和69个频率柜。
[0050]
(6)子频率柜组更新方向的选择
[0051]
p取值为2000,初始步长μ0为0.002,α取值为0.5,子频率柜组个数m为2,具体实施如下:
[0052]
步骤1.不更新自适应滤波器系数,获得最大误差信号幅度,迭代计算p个点的子频率柜误差信号功率和ξ1、子频率柜参考信号功率和χ1,计算公式为:
[0053]
e
max
=max(e
max
,|e
m
(k)|)
[0054]
ξ1=ξ1 |e
m
(k)|2[0055]
χ1=χ1 |r
m
(k)|2[0056]
步骤2.分别在μ
m
=μ和
‑
μ两种更新方向情况下,重复下面步骤,寻找最佳更新方向。
[0057]
(a)迭代计算p个点的子频率柜误差信号功率和ξ2、子频率柜参考信号功率和χ2。
[0058]
(b)如果|e
m
(k)|<(1 δ)e
max
,采用下式更新自适应滤波器系数;否则停止更新。
[0059][0060]
式中,r(i)和e(i)分别为时延参考信号r(k)和误差信号e(k)的第i个频率柜,μ(t)为步长,分别对应0
°
和180
°
两种不同更新方向。
[0061]
步骤3.如果满足|e
m
(k)|>(1 δ)e
max
或ξ2/χ2>δ1ξ1/χ1、其中δ<1,δ1<1,则跳转至步骤5;
[0062]
步骤4.若μ
m
=μ0和
‑
μ0,都满足|e
m
(k)|>(1 δ)e
max
或ξ2/χ2>δ1ξ1/χ1,则μ
m
=μ
m
α,α<1,并返回步骤(1);否则,μ
m
=μ
m
/α,并返回步骤(1);
[0063]
步骤5.比较步骤2中四种情况下所得子带误差信号功率ξ2,ξ2最小值对应合适的子带参考信号类型以及更新方向;
[0064]
步骤6.重复执行步骤1至步骤5。直至m=m
‑
1。
[0065]
经过上述搜索过程,两个频率柜分别对应更新方向为下表:
[0066]
表1 300hz单频频率柜更新方向
[0067]
300hz对应频率柜频率柜更新方向680
°
690
°
[0068]
(7)所有子频率柜组一起调整全带自适应滤波器系数,直至误差降低达到稳态,更新全带自适应滤波器w(z)系数采用如下迭代公式:
[0069][0070]
式中,t为频率柜组个数,μ(m)为步长,且为1和
‑
1,分别对应0
°
和180
°
两种不同更新方向。
[0071]
3.计算量分析
[0072]
假设窄带噪声有效频率柜范围为第r频率柜至第s频率柜,r<s,且s
‑
r 1=j。当0≤i≤r
‑
1 和s 1≤i≤l
‑
1时,r(i)和e(i)均为0,又μ(m)r*(i)与e(i)为实数乘积,故自适应滤波器系数更新式需要计算量为jn实数乘。窄带fdfxlms算法和dctanc算法计算量比较如表2。
[0073]
表2 比较fdfxlms算法和dctanc算法计算量
[0074]
步骤窄带fdfxlms算法dctanc算法次级路径建模l/20频域次级路径l
×
log2(l)0滤波参考信号2l
×
log2(l)0参考信号有效频率柜jlj(l
‑
α)误差信号有效频率柜jljn控制器系数更新jljn总计5370j 590222047j
[0075]
当dct变换长度和dft变换长度相同时,比较表2中两种算法计算量,自适应滤波器长度n为512,dct变换长度l为1790,取dft变换长度也为l,n为l/2,α为767,则窄带fdfxlms计算量为5370j 59022实数乘,窄带dctfxlms算法计算量为2047j 1024实数乘,dctanc算法计算量为2047j,j为窄带信号有效频率柜个数。由表2可知,当dct 变换长度和dft变换长度相等时,窄带fdfxlms算法计算量比窄带dctanc算法计算量大。
五.附图说明
[0076]
图1 dctanc算法结构框图
[0077]
图2 300hz单频频谱图(a)图为dct域中频谱图;(b)图为dft域中频谱图
[0078]
图3 dctanc方法误差曲线,降噪后误差曲线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。