1.本发明涉及火炮技术领域,尤其是一种火箭炮管间姿态校准的系统和计算方法。
背景技术:
2.在现代战争中,火炮担当着越来越重要的角色。在海陆上实现火力压制,提高战斗力,在防空领域,火箭炮的优势也逐渐显露出来,如成本低、密集度高和机动性好等,我国现役火箭炮在射程、密集度、精度及杀伤力等方面都不逊色于发达国家,而且能适应当今及未来战争的需要。但是,现阶段提高火箭炮的操瞄精度所采用的还是传统经验方法,己力不从心,亟需运用现代理论对其进行改造升级和创新。
3.传统的管间平行性是以基准管为基准,采用“远方瞄准点法”或“检查靶法”,这些传统方法存在缺点和不足:检查靶摆放要求精度较高,垂直方向误差难以克服;对场地要求较高,比如空间大小、光线强度;操作需要较多人员,需要人工多次瞄准,费时费力;在能见度低时,从击针孔看不清瞄准点或十字线,造成人眼疲劳;容易产生人为操作误差,影响检测精度;无法输出实际调炮角度;精度低。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的不足,提供一种火箭炮管间姿态校准的系统和计算方法,相比于传统检测方法,对目标靶的放置位置要求降低,检测精度和检测效率更高。为实现以上技术目的,本发明采用的技术方案是:
5.本技术的第一方面,提出一种火箭炮管间姿态校准的系统,包括:目标靶、与目标靶配合的光电校准装置、上位机;
6.所述目标靶上分布有五个测量点a、b、c、d、o;测量点o为中心测量点,其中三个测量点a、o、b分布在一条直线上,另三个测量点c、o、d分布在另一条直线上,测量点a、o、b所在直线与测量点c、o、d所在直线十字相交;
7.所述光电校准装置包括准直装置、数字成像传感器和机械轴;机械轴、数字成像传感器和准直装置依次连接;其中机械轴与光电校准装置的光学轴一致;机械轴与炮管口径相适配;
8.所述上位机与光电校准装置连接,用于火箭炮管间姿态校准的计算以及显示。
9.进一步地,所述目标靶上的测量点为十字或圆点形式。
10.进一步地,所述目标靶为机械靶,或者光电模拟目标靶。
11.本技术的第二方面,提出一种火箭炮管间姿态校准的计算方法,适用于如上文所述的火箭炮管间姿态校准的系统,包括:
12.步骤s1,获取目标靶上五个测量点之间的距离,h1为测量点o到a的距离,h2为测量点o到b的距离,h3为测量点o到c的距离,h4为测量点o到d的距离;
13.步骤s2,通过炮管瞄准,得到作为基准炮管的第一炮管分别对准测量点o、b时炮管旋转的夹角α1,和分别对准测量点a、b时炮管旋转的夹角α2;
14.第一炮管炮口中心位置为g1,测量点a、o、b所在直线的法线与测量点a、o、b所在直线的交点设为e;测量点b到交点e的距离为h,g1到交点e的距离为l;
15.α
//
为第一炮管对准测量点b时的轴线与目标靶测量点a、o、b所在直线的法线之间的夹角,计算α
//
,具体计算公式如下:
[0016][0017][0018][0019]
通过公式(1)
‑
(3),得到:
[0020][0021]
通过公式(4)计算得到α
//
;
[0022]
步骤s3,通过炮管瞄准,得到作为基准炮管的第一炮管分别对准测量点o、d时炮管旋转的夹角α3,和分别对准测量点c、d时炮管旋转的夹角α4;
[0023]
第一炮管炮口中心位置为g1,测量点c、o、d所在直线的法线与测量点c、o、d所在直线的交点设为f;测量点d到交点f的距离为h
′
,g1到交点f的距离为l
′
;
[0024]
α
⊥
为第一炮管对准测量点d时的轴线与目标靶测量点c、o、d所在直线的法线之间的夹角,计算α
⊥
,具体计算公式如下:
[0025][0026][0027][0028]
通过公式(5)
‑
(6),得到:
[0029][0030]
通过公式(8)计算得到α
⊥
;
[0031]
通过α
//
和α
⊥
,能够使第一炮管平行于目标靶的法线;
[0032]
步骤s4,同理,得到第二炮管对准测量点a时的轴线与目标靶测量点a、o、b所在直线的法线之间的夹角β
//
,以及第二炮管对准测量点c时的轴线与目标靶测量点c、o、d所在直线的法线之间的夹角β
⊥
;
[0033]
通过β
//
和β
⊥
,能够使第二炮管平行于目标靶的法线。
[0034]
本发明的优点在于:通过机器视觉判读光电校准装置与目标靶之间的相对角度位置,确定炮管间姿态,调整炮管使其相互平行。操作方法简便,对于目标靶与火箭炮的距离不做要求,简化了操作过程。
附图说明
[0035]
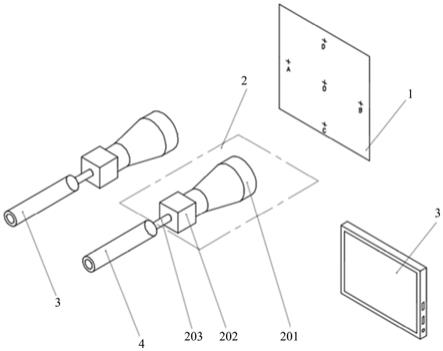
图1为本发明实施例中的火箭炮管间姿态校准的系统示意图。
[0036]
图2为本发明实施例中的目标靶示意图。
[0037]
图3为本发明实施例中的计算方面平面示意图之一。
[0038]
图4为本发明实施例中的计算方面平面示意图之二。
具体实施方式
[0039]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0040]
如图1所示,本发明的实施例提出一种火箭炮管间姿态校准的系统,包括:目标靶1、与目标靶1配合的光电校准装置2、上位机5;
[0041]
所述目标靶1上分布有五个测量点a、b、c、d、o;测量点o为中心测量点,其中三个测量点a、o、b分布在一条直线上,另三个测量点c、o、d分布在另一条直线上,测量点a、o、b所在直线与测量点c、o、d所在直线十字相交;
[0042]
所述目标靶1可以是机械靶,也可以为光电模拟目标靶,其中光电模拟目标靶可以根据需要生成固定距离的目标,如300m、600mm、1200m或者无穷远等距离;
[0043]
所述目标靶1上的测量点可以是十字或圆点等形式,当采用十字形时,十字形的中心为代表测量点位置;
[0044]
所述光电校准装置2包括准直装置201、数字成像传感器202和机械轴203;机械轴203、数字成像传感器202和准直装置201依次连接;其中机械轴203与光电校准装置2的光学轴一致;机械轴203与炮管口径相适配,以保证机械轴203插入炮管炮口后机械轴203与火箭炮炮管高精度结合,从而保证机械轴203与炮管轴线一致,使得炮管轴线与光电校准装置2的光学轴一致;
[0045]
所述上位机5与光电校准装置2连接,用于火箭炮管间姿态校准的计算(包括图像判读、数据处理等)以及显示;
[0046]
对于火箭炮而言,其具有一个基准炮管,设图1中的第一炮管3为基准炮管;第二炮管4为其它炮管之一;火箭炮具有火箭炮调炮系统,其用于瞄准,以及获取夹角等参数;
[0047]
如图2、图3、图4所示,本发明的实施例还提出一种火箭炮管间姿态校准的计算方法,包括:
[0048]
步骤s1,获取目标靶上五个测量点之间的距离,h1为测量点o到a的距离,h2为测量点o到b的距离,h3为测量点o到c的距离,h4为测量点o到d的距离;
[0049]
步骤s2,通过炮管瞄准,得到作为基准炮管的第一炮管3分别对准测量点o、b时炮管旋转的夹角α1,和分别对准测量点a、b时炮管旋转的夹角α2;
[0050]
第一炮管3炮口中心位置为g1,测量点a、o、b所在直线的法线与测量点a、o、b所在直线的交点设为e;测量点b到交点e的距离为h,g1到交点e的距离为l;
[0051]
α
//
为第一炮管3对准测量点b时的轴线与目标靶测量点a、o、b所在直线的法线之间的夹角,计算α
//
,具体计算公式如下:
[0052][0053]
[0054][0055]
通过公式(1)
‑
(3),得到:
[0056][0057]
通过公式(4)计算得到α
//
;
[0058]
步骤s3,通过炮管瞄准,得到作为基准炮管的第一炮管3分别对准测量点o、d时炮管旋转的夹角α3,和分别对准测量点c、d时炮管旋转的夹角α4;
[0059]
第一炮管3炮口中心位置为g1,测量点c、o、d所在直线的法线与测量点c、o、d所在直线的交点设为f;测量点d到交点f的距离为h
′
,g1到交点f的距离为l
′
;
[0060]
α
⊥
为第一炮管3对准测量点d时的轴线与目标靶测量点c、o、d所在直线的法线之间的夹角,计算α
⊥
,具体计算公式如下:
[0061][0062][0063][0064]
通过公式(5)
‑
(6),得到:
[0065][0066]
通过公式(8)计算得到α
⊥
;
[0067]
通过α
//
和α
⊥
,火箭炮系统自动装表,使第一炮管3平行于目标靶的法线;
[0068]
步骤s4,同理,得到第二炮管4对准测量点a时的轴线与目标靶测量点a、o、b所在直线的法线之间的夹角β
//
,以及第二炮管4对准测量点c时的轴线与目标靶测量点c、o、d所在直线的法线之间的夹角β
⊥
;
[0069]
图3和图4中,第二炮管4的炮口中心位置为g2;
[0070]
通过β
//
和β
⊥
,火箭炮系统自动装表,使第二炮管4平行于目标靶的法线;
[0071]
以上就实现了第一炮管3和第二炮管4身管平行。
[0072]
对于其余的炮管,可同理进行计算和操作。
[0073]
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。