技术特征:
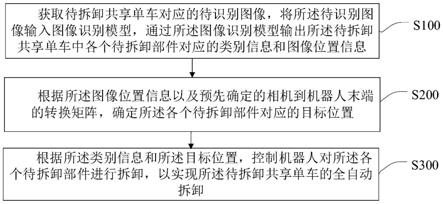
1.一种共享单车全自动拆卸方法,其特征在于,应用于与相机和机器人连接的智能终端,所述方法包括:获取待拆卸共享单车对应的待识别图像,将所述待识别图像输入图像识别模型,通过所述图像识别模型输出所述待拆卸共享单车中各个待拆卸部件对应的类别信息和图像位置信息;根据所述图像位置信息以及预先确定的相机到机器人末端的转换矩阵,确定所述各个待拆卸部件对应的目标位置;根据所述类别信息和所述目标位置,控制机器人对所述各个待拆卸部件进行拆卸,以实现所述待拆卸共享单车的全自动拆卸。2.根据权利要求1所述的共享单车全自动拆卸方法,其特征在于,所述图像识别模型的生成方法包括:将训练图像集中的训练图像输入预设网络模型中,通过所述预设网络模型输出所述训练图像中各部件对应的预测属性标签;其中,所述训练图像集中包括训练图像和所述训练图像中各部件对应的真实属性标签,所述真实属性标签包括真实类别信息和真实图像位置信息,所述预测属性标签包括预测类别信息和预测图像位置信息;根据所述预测属性标签和所述真实属性标签对所述预设网络模型的模型参数进行更新,并继续执行通过所述预设网络模型输出所述训练图像中各部件对应的预测属性标签的步骤,直至所述预设网络模型的训练情况满足预设条件,以得到图像识别模型。3.根据权利要求1所述的共享单车全自动拆卸方法,其特征在于,所述根据所述图像位置信息以及预先确定的相机到机器人末端的转换矩阵,确定所述各个待拆卸部件对应的目标位置的步骤包括:根据所述图像位置信息,确定所述各个待拆卸部件对应的中心位置坐标;根据预先确定的相机到机器人末端的转换矩阵对所述中心位置坐标进行坐标变换,确定所述各个待拆卸部件对应的目标位置。4.根据权利要求3所述的共享单车全自动拆卸方法,其特征在于,所述根据所述图像位置信息,确定所述各个待拆卸部件对应的中心位置坐标的步骤包括:根据所述图像位置信息,确定所述各个待拆卸部件对应的最小外接矩形;获取所述各个待拆卸部件对应的最小外接矩形的中心点坐标,并将所述中心点坐标确定为所述各个待拆卸部件对应的中心位置坐标。5.根据权利要求1所述的共享单车全自动拆卸方法,其特征在于,所述相机到机器人末端的转换矩阵的确定方法包括:获取预先设计的棋盘格,根据所述棋盘格确定所述棋盘格中各个角点在机器人基座坐标系下的坐标和在相机坐标系下的坐标;根据所述棋盘格中各个角点在机器人基座坐标系下的坐标和在相机坐标系下的坐标,确定相机到机器人末端的转换矩阵。6.根据权利要求5所述的共享单车全自动拆卸方法,其特征在于,所述根据所述棋盘格确定所述棋盘格中各个角点在机器人基座坐标系下的坐标和在相机坐标系下的坐标的步骤包括:根据所述棋盘格对相机进行标定,确定所述相机的内外参数以及畸变系数;
获取所述棋盘格中各个角点的图像坐标,根据所述相机的内外参数以及畸变系数对所述图像坐标进行坐标变换,确定所述棋盘格中各个角点在相机坐标系下的坐标。7.根据权利要求6所述的共享单车全自动拆卸方法,其特征在于,所述根据所述棋盘格确定所述棋盘格中各个角点在机器人基座坐标系下的坐标和在相机坐标系下的坐标的步骤还包括:根据所述棋盘格,确定棋盘格坐标系到机器人末端坐标系的转换矩阵和所述棋盘格中各个角点在棋盘格坐标系下的坐标;根据棋盘格坐标系到机器人末端坐标系的转换矩阵和所述棋盘格中各个角点在棋盘格坐标系下的坐标,确定所述棋盘格中各个角点在机器人基座坐标系下的坐标。8.根据权利要求1所述的共享单车全自动拆卸方法,其特征在于,根据所述类别信息和所述目标位置,控制机器人对所述各个待拆卸部件进行拆卸,以实现所述待拆卸共享单车的全自动拆卸的步骤包括:根据所述类别信息以及预先设置的类别信息与拆卸信息的对应关系,确定所述各个待拆卸部件对应的拆卸信息;控制机器人末端移动到所述目标位置,并控制机器人按照所述拆卸信息对所述各个待拆卸部件进行拆卸,以实现所述待拆卸共享单车的全自动拆卸。9.一种智能终端,其特征在于,包括:处理器、与处理器通信连接的存储介质,所述存储介质适于存储多条指令;所述处理器适于调用所述存储介质中的指令,以执行实现上述权利要求1
‑
8任一项所述的共享单车全自动拆卸方法的步骤。10.一种计算机可读存储介质,其上存储有多条指令,其特征在于,所述指令适于由处理器加载并执行,以执行实现上述权利要求1
‑
8任一项所述的共享单车全自动拆卸方法的步骤。
技术总结
本发明公开了一种共享单车全自动拆卸方法、智能终端及存储介质,包括:获取待拆卸共享单车对应的待识别图像,将待识别图像输入图像识别模型,通过图像识别模型输出待拆卸共享单车中各个待拆卸部件对应的类别信息和图像位置信息;根据图像位置信息以及预先确定的相机到机器人末端的转换矩阵,确定各个待拆卸部件对应的目标位置;根据类别信息和目标位置,控制机器人对各个待拆卸部件进行拆卸。本发明根据图像识别模型输出的类别信息和图像位置信息,控制机器人对各个待拆卸部件进行拆卸,可以精确识别待拆卸部件的类别信息并精确定位位置信息,实现共享单车的自动分类拆卸与共享单车零件的循环利用,解决人工暴力拆卸造成的资源浪费问题。资源浪费问题。资源浪费问题。
技术研发人员:张坛 张政
受保护的技术使用者:深圳技术大学
技术研发日:2021.08.20
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。