1.本实用新型属于无人机技术领域,具体涉及一种基于无人机飞控转译的数据处理器供电系统。
背景技术:
2.实景三维建模是使用数码相机对实际场景进行多角度环视拍摄之后,对照片进行后期拼合,生成实际场景的三维模型的技术。用于拼合生成三维模型的照片质量及照片拍摄的空间位置精度直接决定了拼合的三维模型几何精度。
3.目前用于户外实景三维建模的照片,主要使用无人机挂载使用多台数码相机拼接改造的的多镜头相机(倾斜摄影相机)实现。
4.受限于传统数码相机的固有性能,目前的倾斜摄影相机没有能够避免sensor(图像传感器)使用卷帘曝光的运作方式导致的照片果冻效应。
5.同时为了最大幅度减少照片果冻效应的影响,目前的倾斜摄影相机完全使用机械快门实现曝光控制,机械快门作为相机系统磨损最快的组件,制约了倾斜摄影相机的使用寿命。
6.独立的数码相机拼接在照片拍摄过程中,不同相机采集的图像通过互相独立的主控模块计算生成独立的照片,无法保证所有相机在一个绝对瞬间完成图像采集,导致无人机在某个空间位置给出拍照指令后,不同相机完成拍摄的位置,伴随无人机的移动及姿态变化,不同相机的完成拍照位置已经不在拍摄计划位置。
7.多台数码相机拼接改造倾斜摄影相机的方案,倾斜摄影相机的重量取决于选用的数码相机型号,大量的冗余组件导致整机重量难以控制。
8.此外,在无人机飞控转译的数据处理器供电系统中,经常会出现电压过高,进而影响到mcu和相机主控系统的供电安全,同时对于接收来自无人机数据接口(con1)的电源输入,无法实现dc
‑
dc的同步降压,进而无法保障直流电源供给。
9.因此,基于上述在无人机飞控转译的数据处理器供电系统中,经常会出现电压过高,进而影响到mcu和相机主控系统的供电安全,同时对于接收来自无人机数据接口(con1)的电源输入,无法实现dc
‑
dc的同步降压,进而无法保障直流电源供给的缺陷技术问题,急需设计开发一种基于无人机飞控转译的数据处理器供电系统。
技术实现要素:
10.本实用新型的目的在于提供一种基于无人机飞控转译的数据处理器供电系统。
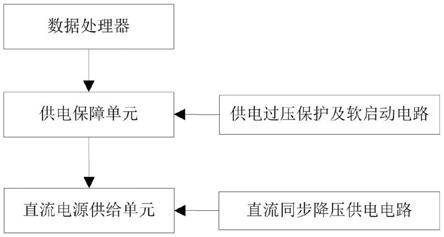
11.本实用新型的目的是这样实现的:所述系统包括:数据处理器,用于实现与无人机倾斜摄影相机单一主控板之间的数据交换;
12.供电保障单元,用于实现所述数据处理器的供电保障;
13.直流电源供给单元,用于实现直流转换器同步降压,并向所述数据处理器提供直流电源供给。
14.本实用新型通过一种基于无人机飞控转译的数据处理器供电系统,通过用于实现与无人机倾斜摄影相机单一主控板之间的数据交换的数据处理器,用于实现所述数据处理器的供电保障的供电保障单元,用于实现直流转换器同步降压,并向所述数据处理器提供直流电源供给的直流电源供给单元,以及所述供电保障单元中,设置的供电过压保护及软启动电路;所述直流电源供给单元中,设置的直流同步降压供电电路;
15.可以实现在无人机飞控转译的数据处理器供电系统中,避免出现电压过高,进而影响到mcu和相机主控系统的供电安全,也就是说,保证mcu和相机主控系统的供电安全。即通过所述供电过压保护及软启动电路提供过压保护,若电压大于或等于15v,则实时对电压进行关断。
16.通过所述直流同步降压供电电路,在接收来自无人机数据接口(con1)的电源输入时,结合电路中设置的电源管理芯片,实现dc
‑
dc的同步降压,并实现向mcu提供3.3v的直流电源供给。
附图说明
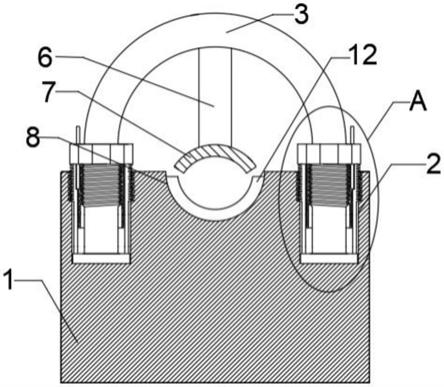
17.图1为本实用新型主控模块及sensor(图像传感器)结构侧示意图;
18.图2为本实用新型主控模块之俯视示意图;
19.图3为本实用新型sensor(图像传感器)镜头之正视示意图;
20.图4为本实用新型sensor(图像传感器)镜头之仰视示意图;
21.图5为本实用新型主控模块及sensor(图像传感器)结构俯视示意图;
22.图6为本实用新型飞控转译单元之一示意图;
23.图7为本实用新型飞控转译单元之二示意图;
24.图8为本实用新型镜头结构示意图;
25.图9为本实用新型系统装置结构外形立体图之一示意图;
26.图10为本实用新型系统装置方案结构外形立体图之二示意图;
27.图11为本实用新型一种基于无人机免相控实景三维建模测绘的方法流程架构示意图;
28.图12为本实用新型一种基于无人机免相控实景三维建模测绘的系统架构示意图;
29.图13为本实用新型一种基于无人机免相控实景三维建模测绘平台架构示意图;
30.图14为本实用新型一种基于无人机飞控转译的数据处理器供电系统架构示意图;
31.图15为本实用新型一种基于无人机飞控转译的数据处理器供电系统之微控制单元电路示意图;
32.图16为本实用新型一种基于无人机飞控转译的数据处理器供电系统之供电过压保护及软启动电路示意图;
33.图17为本实用新型一种基于无人机飞控转译的数据处理器供电系统之直流同步降压供电电路示意图;
34.图18为本实用新型一种基于无人机飞控转译的数据处理器供电系统之无人机飞控数据接口电路之一示意图;
35.图19为本实用新型一种基于无人机飞控转译的数据处理器供电系统之无人机飞控数据接口电路之二示意图;
36.图20为本实用新型一种基于无人机飞控转译的数据处理器供电系统之debug接口电路之一示意图;
37.图21为本实用新型一种基于无人机飞控转译的数据处理器供电系统之debug接口电路之二示意图;
38.图22为本实用新型一种基于无人机飞控转译的数据处理器供电系统之jtag接口电路示意图;
39.图23为本实用新型一种基于无人机飞控转译的数据处理器供电系统之相机主控数据接口电路之一示意图;
40.图24为本实用新型一种基于无人机飞控转译的数据处理器供电系统之相机主控数据接口电路之二示意图;
41.图中:
[0042]1‑
图像传感器主控单元;a
‑
第一图像传感器镜头尺寸;b
‑
图像传感器镜头夹角;c
‑
第一主控模块内尺寸;d
‑
第一主控模块外尺寸;e
‑
第二主控模块内尺寸;f
‑
第二主控模块外尺寸;h
‑
第二图像传感器镜头;h
‑
第一图像传感器镜头螺纹通孔;i
‑
第一镜头尺寸;j
‑
第二镜头尺寸;3
‑
镜头通孔;4
‑
第三镜头尺寸;5
‑
第二图像传感器镜头螺纹通孔;k
‑
第一主控板及图像传感器镜头尺寸;l
‑
第二主控板及图像传感器镜头尺寸;m
‑
第三主控板及图像传感器镜头尺寸;n
‑
第四主控板及图像传感器镜头尺寸;o
‑
第五主控板及图像传感器镜头尺寸;6
‑
主控板模块。
具体实施方式
[0043]
下面结合附图和实施例对本实用新型作进一步说明,以便所属领域技术人员详细了解本实用新型,但不以任何方式对本实用新型加以限制。依据本实用新型的技术启示所做的任何变换或改进均属于本实用新型的保护范围。
[0044]
以下结合附图对本实用新型作进一步阐述。
[0045]
如图1~24所示,本实用新型提供了一种基于无人机飞控转译的数据处理器供电系统,所述系统包括:
[0046]
数据处理器,用于实现与无人机倾斜摄影相机单一主控板之间的数据交换;
[0047]
供电保障单元,用于实现所述数据处理器的供电保障;
[0048]
直流电源供给单元,用于实现直流转换器同步降压,并向所述数据处理器提供直流电源供给。
[0049]
所述供电保障单元中,设置有供电过压保护及软启动电路;
[0050]
所述供电过压保护及软启动电路,用于接收来自无人机数据接口的电源输入,通过金氧半场效晶体管实现电源过压保护和软启动,并保证所述数据处理器和相机主控系统的供电安全。
[0051]
所述软启动具体为10毫秒的软启动。
[0052]
所述的供电过压保护及软启动电路,包括:
[0053]
第一场效应管,所述第一场效应管的漏极和第四电容、第五电容、电源供给端、第一测试点连接;所述第四电容的另一端和第五电容的另一端共同接地;
[0054]
所述第一场效应管的栅极和第十电阻、第三电容、第八电阻、第二三极管集电极连
接;所述第十电阻的另一端接地;
[0055]
所述第一场效应管的源极和第三电容的另一端、第八电阻的另一端、第二三极管发射极、第七电阻、第六电阻、第二电容、第五双向瞬变抑制二极管、保险丝连接;所述保险丝的另一端和电源输入端连接;
[0056]
所述第二三极管发射极基极和第九电阻连接;所述第九电阻的另一端和第七电阻的另一端、第六二极管的负极连接;所述第六二极管的阳极和第十一电阻共同接地;所述第十一电阻的另一端和第六电阻的另一端连接;所述第二电容的另一端和第五双向瞬变抑制二极管另一端接地。
[0057]
所述的供电过压保护及软启动电路,若电压大于或等于15v,则实时对电压进行关断。
[0058]
所述第一场效应管具体为:dmp3028ldf
‑
7。
[0059]
所述直流电源供给单元中,设置有直流同步降压供电电路;
[0060]
所述直流同步降压供电电路,用于接收无人机数据接口的电源输入,并通过电源管理芯片,实现dc
‑
dc的同步降压,向数据处理器提供的直流电源供给。
[0061]
所述电源管理芯片具体为:mp1470gj;
[0062]
所述直流电源供给电压为3.3v。
[0063]
所述直流同步降压供电电路,包括:
[0064]
电源管理芯片,所述电源管理芯片的接地脚接地;所述电源管理芯片的开关控制脚和第一电感、第十九电容连接;所述第十九电容的另一端和所述电源管理芯片的自升压脚端连接;
[0065]
所述第一电感的另一端和第二测试点、直流电源供给端、第十六电阻、第二十电容、第二十一电容连接;所述第二十电容的另一端、第二十一电容的另一端分别接地;所述第十六电阻的另一端和第十五电阻、第十七电阻连接;所述第十七电阻的另一端接地;所述第十五电阻和所述所述电源管理芯片的输出电压反馈脚连接;
[0066]
所述电源管理芯片的电源输入端和第十三电阻、第十八电容、第十七电容、第十二电阻连接;所述第十二电阻的另一端和电源输入端连接;所述第十八电容的另一端和第十七电容的另一端分别接地;所述第十三电阻的另一端和所述电源管理芯片的使能脚、第十四电阻连接;所述第十四电阻的另一端接地。
[0067]
具体地,在本实用新型实施例中,如图15所示,提供一种微控制单元(microcontroller unit;mcu),也就是说,使用意法半导体的stm32f407vet6tr作为psdk转译版的微控制器,基于高性能的arm cortex
‑
m4 32位risc内核,运行频率168mhz,cortex
‑
m4内核具有一个浮点单元(fpu)单精度,支持所有arm单精度数据处理指令和数据类型。它还执行全套的dsp指令,并包含一个存储器保护单元,加强应用的安全性。stm32f407vgt6融合了高速内嵌存储器(闪存存储器1mbyte,192k字节 sram),4k字节备用sram,以及一个加强范围的输入输出,外部设备连接至两个apb总线,三个ahb总线和一个32位多ahb总线矩阵。
[0068]
较佳地,在图15中:vdd_m3v3是带电压保护和软启动的直流电源接入。mcu_tx2,mcu_rx2是与无人机飞控数据通讯接入点,对应板卡中无人机飞控数据接口(接口名con1)的xp_uart_tx,xp_uart_rx。mcu_h_power_apply是接收来自无人机飞控的电源信号接入
点,对应板卡中无人机飞控数据接口(接口名con1)的xp_h_power_apply。mcu_tx3,mcu_rx3是板卡debug接口的接入位置(接口名con2)。pd_mcu_swdio,pd_mcu_swclk,pd_mcu_nrst是板卡jtag接口的接入位置(接口名con3)。hi_uart4_txd,hi_uart4_rxd是与多镜头相机主控板进行数据通讯的接入点,对应板卡中的相机主控数据接口(接口名con4)的uart_tx,uart_rx。
[0069]
通过本设计,mcu单元可以同时与无人机飞控、相机主控两个不同系统保持实时的高速数据交换(串口全双工)。mcu的数据运算能力配合定制程序,实现无人机飞控、相机主控不同系统间的数据转译通讯功能。
[0070]
优选地,本实用新型系统中还是设置有供电过压保护及软启动电路,如图16所示,用于接收来自无人机数据接口(con1)的电源输入vdd_13v6,通过金氧半场效晶体管(mosfet)实现电源过压保护和10毫秒的软启动,同时保证mcu和相机主控系统的供电安全,实现过压保护,到15v关断【(1 49.9/10)*2.5=15】;在所述的供电过压保护及软启动电路中,vgs=
‑
1.2~
‑
2.4v。
[0071]
更进一步地,本实用新型系统中还是设置有直流同步降压供电电路,如图17所示,用于接收来自无人机数据接口(con1)的电源输入vdd_13v6,通过一颗美国芯源的mp1470gj电源管理芯片,实现dc
‑
dc的同步降压,向mcu提供3.3v的直流电源供给(mcu中的vdd_m3v3)【(47/15 1)*0.8=3.306v】。
[0072]
具体地,本实用新型系统中还设置有无人机飞控数据接口(con1),如图18~19所示,用于接入无人机飞控系统的接口,vdd_13v6接收无人机飞控提供的dc13.6v电源供给,xp_uart_tx和xp_uart_rx与无人机飞控交换数据(全双工串口方式),xp_h_power_apply接收无人机飞控的电源信号(飞控系统是否就绪,电平信号)。
[0073]
此外,还设置有debug接口(con2),如图20~21所示,通过接入计算机的调试接口,通过串口通讯,在开发或调试过程中获取mcu的运行状态及信息。
[0074]
还设置有jtag接口(con3),如图22所示,也就是说,通过设置的jtag接口(con3),使用jtag(joint test action group,联合测试工作组)标准,通过仿真器连接到计算机,向mcu烧写程序时使用的接口。
[0075]
还设置有相机主控数据接口(con4),如图23~24所示,用于接入相机主控板的接口,pvdd1向相机主控板提供dc13.6v的电源输出,trigger向相机主控板下达拍照指令(快门信号),state接收来自相机的拍照状态(热靴信号),uart_tx和uart_rx与相机主控交换数据(全双工串口方式)。
[0076]
本实用新型具体实施例方案中,还涉及到一种基于无人机免相控实景三维建模测绘的方法,所述的方法包括如下步骤:
[0077]
s1、采集待建模测绘的实景图像数据信息;
[0078]
s2、获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0079]
s3、结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;
[0080]
s4、实时生成实景三维测绘图。
[0081]
所述采集待建模测绘的实景图像数据信息之中,还包括:
[0082]
s11、根据采集实景图像数据信息指令,实时生成至少五个实景图像数据;
[0083]
s12、生成已完成采集实景图像数据信息。
[0084]
所述根据采集实景图像数据信息指令,实时生成至少五个实景图像数据之中,还包括:
[0085]
s111、调试识别所述实景图像数据信息指令。
[0086]
所述根据采集实景图像数据信息指令,实时生成至少五个实景图像数据之中,还包括:
[0087]
s112、结合光照,通过解析为图像的电信号,于同一时间点生成至少五个实景图像数据。
[0088]
所述获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据之中,还包括:
[0089]
s21、根据已完成采集实景图像数据信息指令,获取与采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据。
[0090]
所述结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据之中,还包括:
[0091]
s31、根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据;
[0092]
s32、于单一存储位置中对所述可视化数据进行存储。
[0093]
所述根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据之中,还包括:
[0094]
s311、结合镜头畸变参数,分析处理实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0095]
s312、生成实景图像相对应的空间坐标信息,并实时写入所述实景图像中。
[0096]
为实现本实用新型方案目的,还提供一种基于无人机免相控实景三维建模测绘系统,所述系统具体包括:
[0097]
数据采集单元,用于采集待建模测绘的实景图像数据信息;
[0098]
获取单元,用于获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0099]
分析处理单元,用于结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;
[0100]
生成单元,用于实时生成实景三维测绘图。
[0101]
所述数据采集单元中,还包括:
[0102]
第一生成模块,用于根据采集实景图像数据信息指令,实时生成至少五个实景图像数据;
[0103]
第二生成模块,用于生成已完成采集实景图像数据信息;
[0104]
调试识别模块,用于调试识别所述实景图像数据信息指令;
[0105]
第三生成模块,用于结合光照,通过解析为图像的电信号,于同一时间点生成至少五个实景图像数据;
[0106]
所述获取单元中,还包括:
[0107]
第一获取模块,用于根据已完成采集实景图像数据信息指令,获取与采集到实景
图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0108]
所述分析处理单元中,还包括:
[0109]
第四生成模块,用于根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据;
[0110]
数据存储模块,用于于单一存储位置中对所述可视化数据进行存储;
[0111]
第一分析处理模块,用于结合镜头畸变参数,分析处理实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0112]
第五生成模块,用于生成实景图像相对应的空间坐标信息,并实时写入所述实景图像中。
[0113]
为实现本实用新型方案目的,还提供一种基于无人机免相控实景三维建模测绘平台,包括:处理器、存储器以及基于无人机免相控实景三维建模测绘平台控制程序;
[0114]
其中在所述的处理器执行所述的基于无人机免相控实景三维建模测绘平台控制程序,所述的基于无人机免相控实景三维建模测绘平台控制程序被存储在所述存储器中,所述的基于无人机免相控实景三维建模测绘平台控制程序,实现所述的基于无人机免相控实景三维建模测绘方法步骤。
[0115]
优选地,本实用新型一种基于无人机飞控转译的数据处理器供电系统应用在一个或者多个终端或者服务器中。所述终端是一种能够按照事先设定或存储的指令,自动进行数值计算和/或信息处理的设备,其硬件包括但不限于微处理器、专用集成电路(application specific integrated circuit,asic)、可编程门阵列(field-programmable gate array,fpga)、数字处理器(digital signal processor,dsp)、嵌入式设备等。
[0116]
所述终端可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。所述终端可以与客户通过键盘、鼠标、遥控器、触摸板或声控设备等方式进行人机交互。
[0117]
本实用新型为实现一种基于无人机飞控转译的数据处理器供电系统、系统、平台及存储介质。
[0118]
如图11所示,是本实用新型实施例提供的基于无人机免相控实景三维建模测绘方法的流程图。
[0119]
在本实施例中,所述基于无人机免相控实景三维建模测绘方法,可以应用于具备显示功能的终端或者固定终端中,所述终端并不限定于个人电脑、智能手机、平板电脑、安装有摄像头的台式机或一体机等。
[0120]
所述基于无人机免相控实景三维建模测绘方法也可以应用于由终端和通过网络与所述终端进行连接的服务器所构成的硬件环境中。网络包括但不限于:广域网、城域网或局域网。本实用新型实施例的基于无人机免相控实景三维建模测绘方法可以由服务器来执行,也可以由终端来执行,还可以是由服务器和终端共同执行。
[0121]
例如,对于需要进行基于无人机免相控实景三维建模测绘终端,可以直接在终端上集成本实用新型的方法所提供的基于无人机免相控实景三维建模测绘功能,或者安装用于实现本实用新型的方法的客户端。再如,本实用新型所提供的方法还可以软件开发工具包(software development kit,sdk)的形式运行在服务器等设备上,以sdk的形式提供基于无人机免相控实景三维建模测绘功能的接口,终端或其他设备通过所提供的接口即可实
现基于无人机免相控实景三维建模测绘功能。
[0122]
以下结合附图对本实用新型作进一步阐述。
[0123]
如图11所示,本实用新型提供了一种基于无人机免相控实景三维建模测绘的方法,所述的方法包括如下步骤:
[0124]
s1、采集待建模测绘的实景图像数据信息;
[0125]
s2、获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0126]
s3、结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;
[0127]
s4、实时生成实景三维测绘图。
[0128]
也就是说,通过采集待建模测绘的实景图像数据信息;同时获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;最终实时生成实景三维测绘图。
[0129]
具体地,在所述采集待建模测绘的实景图像数据信息之中,还包括:
[0130]
s11、根据采集实景图像数据信息指令,实时生成至少五个实景图像数据;
[0131]
s12、生成已完成采集实景图像数据信息。
[0132]
也就是说,在步骤采集待建模测绘的实景图像数据信息中,首先根据采集实景图像数据信息指令,通过接受到拍照指令后,实时生成至少五个实景图像数据,在完成生产至少五个实景图像数据后,实时生成已完成采集实景图像数据信息,并进行下一步操作。
[0133]
较佳地,所述根据采集实景图像数据信息指令,实时生成至少五个实景图像数据之中,还包括:
[0134]
s111、调试识别所述实景图像数据信息指令。
[0135]
也就是说,在获得采集实景图像数据信息指令之前,还将对于获取实景图像相关指令进行调试识别,换言之,在本实用新型方案中,包括飞控转译单元和主控板单元,在所述的飞控转译单元中,设置有定制开发的基于mpu(微型数据处理器)单板计算机,用串口实现与倾斜摄影相机单一主控板之间的数据交换。用串口或网络协议接口实现与无人机飞控的数据交换。不同无人机飞控系统的通讯控制协议并不相同,飞控转译单元配合定制的(针对某无人机飞控系统的通讯控制协议)通讯协议转换程序,实现倾斜摄影相机与不同无人机飞控的兼容使用。
[0136]
优选地,所述根据采集实景图像数据信息指令,实时生成至少五个实景图像数据之中,还包括:
[0137]
s112、结合光照,通过解析为图像的电信号,于同一时间点生成至少五个实景图像数据。
[0138]
也就是说,所述的同时在5个sensor上获取图像具体为:同时向5个sensor施加电流,电流在接受可见光照射的sensor表面通过微光敏二极管结构,成为可解析为图像的电信号。
[0139]
具体地,所述获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据之中,还包括:
[0140]
s21、根据已完成采集实景图像数据信息指令,获取与采集到实景图像数据信息相
对应的无人机空间位置及飞行姿态数据。
[0141]
也就是说,获取与采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据的前提是:根据已完成采集实景图像数据信息指令才能执行。
[0142]
较佳地,所述结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据之中,还包括:
[0143]
s31、根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据;
[0144]
s32、于单一存储位置中对所述可视化数据进行存储。
[0145]
优选地,所述根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据之中,还包括:
[0146]
s311、结合镜头畸变参数,分析处理实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0147]
s312、生成实景图像相对应的空间坐标信息,并实时写入所述实景图像中。
[0148]
也就是说,通过定制开发的基于mpu(微型数据处理器)单板计算机,倾斜摄影相机的主要控制单元。接受到飞控转译单元给到的拍照指令后,同时在5个sensor上采集图像数据(在本实用新型方案中,所述的sensor图像传感器数量至少为5个),完成采集后,主控板单元并向飞控转译单元询问当前无人机飞控提供的空间坐标信息(rtk、gps)、无人机飞行姿态信息,上述信息加上镜头畸变参数经过分析处理后,整合到照片文件中,照片统一保存至单一存储位置(sd卡或ssd硬盘)。
[0149]
在本实用新型实施例中,如图1所示,主控模块及sensor(图像传感器)结构示意图所示,本实用新型通过单一运算板的图像采集主控模块实现对多个sensor的控制。每个sensor不使用独立的图像采集控制单元,不同sensor可以在同一时间采集不同照片并统一保存至主控模块上的sd卡或ssd硬盘。每个sensor前不设置机械快门组件,直接安装镜头。
[0150]
如图2所示,本实用新型飞控转译单元示意图所示,本实用新型通过基于mpu运算单元的微型计算板实现无人机飞行控制系统与倾斜摄影相机的控制通讯,改写运行于mpu的程序即可实现倾斜摄影相机和不同种类无人机飞控的对接。
[0151]
如图3所示,本实用新型的镜头结构图,小巧轻便,满足本系统重量控制的要求。
[0152]
如图4所示,本实用新型外形示意图,本实用新型结构紧凑,便于挂载在不同负载能力的无人机使用。
[0153]
具体地,在本实用新型方案中,包括飞控转译单元和主控板单元,在所述的飞控转译单元中,设置有定制开发的基于mpu(微型数据处理器)单板计算机,用串口实现与倾斜摄影相机单一主控板之间的数据交换。用串口或网络协议接口实现与无人机飞控的数据交换。不同无人机飞控系统的通讯控制协议并不相同,飞控转译单元配合定制的(针对某无人机飞控系统的通讯控制协议)通讯协议转换程序,实现倾斜摄影相机与不同无人机飞控的兼容使用。
[0154]
倾斜摄影相机挂载到无人机后,飞控转译单元用无人机飞控的通讯控制协议向无人机注册挂载设备,配合无人机完成初始化检查。
[0155]
当无人机发出拍照指令时,飞控转译单元翻译这个指令,用倾斜摄影相机的通讯控制协议控制倾斜摄影相机主控板完成拍照工作。
[0156]
倾斜摄影相机主控板告知飞控转译单元拍照完成后,飞控转译单元用无人机飞控的通讯控制协议向无人机飞控询问无人机空间位置、飞行姿态等信息。飞控转译单元翻译这些信息后用倾斜摄影相机的通讯控制协议送给倾斜摄影相机主控板。
[0157]
所述的主控板单元,通过定制开发的基于mpu(微型数据处理器)单板计算机,倾斜摄影相机的主要控制单元。接受到飞控转译单元给到的拍照指令后,同时在5个sensor上采集图像数据(在本实用新型方案中,所述的sensor图像传感器数量至少为5个),完成采集后,主控板单元并向飞控转译单元询问当前无人机飞控提供的空间坐标信息(rtk、gps)、无人机飞行姿态信息,上述信息加上镜头畸变参数经过分析处理后,整合到照片文件中,照片统一保存至单一存储位置(sd卡或ssd硬盘)。
[0158]
较佳地,所述的同时在5个sensor上获取图像具体为:同时向5个sensor施加电流,电流在接受可见光照射的sensor表面通过微光敏二极管结构,成为可解析为图像的电信号。
[0159]
具体地,单一的单板计算机来实现不同sensor的图像获取,统一了拍照获取图像的时间,确保每次拍照时所有sensor都在计划拍照的空间位置采集图像,不受到无人机运动的影响。
[0160]
向照片文件中写入空间坐标信息(rtk、gps)、无人机飞行姿态信息及镜头畸变参数是数码相机拍照无法实现的功能,这大大简化了利用照片拼合的三维模型的工作流程(规避了人工整理数据)。
[0161]
在本实用新型方案中,具体还涉及到镜头单元,通过完全定制,用以满足sensor对镜头的光学参数要求。由于选用的sensor结构区别于数码相机的sensor,要求通过镜头照射到sensor表面的光线完全垂直于sensor表面。定制镜头采用了垂直光路设计;
[0162]
具体地,在本实用新型方案中,包括实施保存照片数据,即属于存储单元,用于实时存储照片数据,比如将相应的数据实时保存于sd卡或ssd硬盘中;
[0163]
换言之,在本实用新型优选的实施例中,通过选用全局曝光工作方式的的sensor(图像传感器),定制开发多sensor单控制板的倾斜摄影相机,使用模块化设计,独立开发飞控转译单元,满足倾斜摄影相机与不同无人机的的通讯控制转译功能,所有镜头拍摄的照片在整合空间坐标信息(rtk、gps)、无人机飞行姿态信息及镜头畸变参数后统一存储到单一sd卡或单一ssd硬盘中。
[0164]
具体地,通过采用sensor(图像传感器)的全局曝光工作方式:避免照片出现果冻效应,无畸变。使用电子快门曝光:避免使用机械快门,无机械快门的使用寿命限制。
[0165]
采用多sensor单控制板的倾斜摄影相机:避免多数码相机集成导致的拍照完成时间不统一问题。多sensor单控制板设计的倾斜摄影相机是真正的多镜头单一相机,多镜头的拍照完成时间可以做到完全一致。
[0166]
多镜头单一相机:规避多数码相机拼接方案中多块相机主控制板等冗余结构,减少系统结构大小及重量。也可以规避多数码相机拼接方案导致的不同相机拍摄照片各自存储到不同sd卡中,照片不携带特殊信息的弊端。多数码相机拼接倾斜摄影相机在照片采集完成后,在拼合三维模型过程中,需要人工多次从不同sd卡拷贝照片、整理照片顺序、对照并补充空间坐标信息(rtk、gps)、无人机飞行姿态信息及镜头畸变参数等大量工作。多镜头单一相机在照片采集完成后,工作人员可以从单一存储介质(sd卡或ssd硬盘)拷贝出已经
整理好顺序,并且照片文件本身集成空间坐标信息(rtk、gps)、无人机飞行姿态信息及镜头畸变参数的照片文件,大大提高了使用照片进行三维建模的工作效率。
[0167]
通过模块化设计,独立开发飞控转译单元:适配不同的无人机使用时,完全不需要对倾斜摄影相机的主控制板做出调整改造,提高了整个系统对不同的无人机的兼容性。
[0168]
垂直光路设计的小型化定制镜头:满足全局曝光sensor(图像传感器)对镜头最大主光角(cra)接近0
°
的特殊光学要求,轻量化、小型化设计,减少了倾斜摄影相机整机重量及体积,同时保证照片色彩观感。
[0169]
为实现上述目的,本实用新型还提供一种基于无人机免相控实景三维建模测绘系统,如图12所示,所述的系统具体包括:
[0170]
数据采集单元,用于采集待建模测绘的实景图像数据信息;
[0171]
获取单元,用于获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0172]
分析处理单元,用于结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;
[0173]
生成单元,用于实时生成实景三维测绘图。
[0174]
所述数据采集单元中,还包括:
[0175]
第一生成模块,用于根据采集实景图像数据信息指令,实时生成至少五个实景图像数据;
[0176]
第二生成模块,用于生成已完成采集实景图像数据信息;
[0177]
调试识别模块,用于调试识别所述实景图像数据信息指令;
[0178]
第三生成模块,用于结合光照,通过解析为图像的电信号,于同一时间点生成至少五个实景图像数据;
[0179]
所述获取单元中,还包括:
[0180]
第一获取模块,用于根据已完成采集实景图像数据信息指令,获取与采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0181]
所述分析处理单元中,还包括:
[0182]
第四生成模块,用于根据采集到实景图像数据信息相对应的无人机空间位置及飞行姿态数据,结合镜头畸变参数,实时生成可视化数据;
[0183]
数据存储模块,用于于单一存储位置中对所述可视化数据进行存储;
[0184]
第一分析处理模块,用于结合镜头畸变参数,分析处理实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0185]
第五生成模块,用于生成实景图像相对应的空间坐标信息,并实时写入所述实景图像中。
[0186]
在本实用新型系统方案实施例中,所述的一种基于无人机免相控实景三维建模测绘系统中涉及的方法步骤,具体细节已在上文阐述,此处不再赘述。
[0187]
为实现上述目的,本实用新型还提供一种基于无人机免相控实景三维建模测绘平台,如图13所示,包括:
[0188]
处理器、存储器以及基于无人机免相控实景三维建模测绘平台控制程序;
[0189]
其中在所述的处理器执行所述的基于无人机免相控实景三维建模测绘平台控制
程序,所述的基于无人机免相控实景三维建模测绘平台控制程序被存储在所述存储器中,所述的基于无人机免相控实景三维建模测绘平台控制程序,实现所述的基于无人机免相控实景三维建模测绘方法步骤,例如:
[0190]
s1、采集待建模测绘的实景图像数据信息;
[0191]
s2、获取所述实景图像数据信息相对应的无人机空间位置及飞行姿态数据;
[0192]
s3、结合所述实景图像数据信息,实时分析处理所述实景图像数据信息的位置及无人机飞行姿态数据;
[0193]
s4、实时生成实景三维测绘图。
[0194]
步骤具体细节已在上文阐述,此处不再赘述。
[0195]
本实用新型实施例中,所述的基于无人机免相控实景三维建模测绘平台内置处理器,可以由集成电路组成,例如可以由单个封装的集成电路所组成,也可以是由多个相同功能或不同功能封装的集成电路所组成,包括一个或者多个中央处理器(central processing unit,cpu)、微处理器、数字处理芯片、图形处理器及各种控制芯片的组合等。处理器利用各种接口和线路连接取各个部件,通过运行或执行存储在存储器内的程序或者单元,以及调用存储在存储器内的数据,以执行基于无人机免相控实景三维建模测绘各种功能和处理数据;
[0196]
存储器用于存储程序代码和各种数据,安装在基于无人机免相控实景三维建模测绘平台中,并在运行过程中实现高速、自动地完成程序或数据的存取。
[0197]
所述存储器包括只读存储器(read
‑
only memory,rom),随机存储器(random access memory,ram)、可编程只读存储器(programmable read
‑
only memory,prom)、可擦除可编程只读存储器(erasable programmable read
‑
only memory,eprom)、一次可编程只读存储器(one
‑
time programmable read
‑
only memory,otprom)、电子擦除式可复写只读存储器(electrically
‑
erasable programmable read
‑
only memory,eeprom)、只读光盘(compact disc read
‑
only memory,cd
‑
rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者能够用于携带或存储数据的计算机可读的任何其他介质。
[0198]
本实用新型通过一种基于无人机飞控转译的数据处理器供电系统、系统及平台,可以通过一个主控模块同时从多个sensor(图像传感器)获取图像,确保倾斜摄影相机不同方向的图像采集在1ms之内完成,保证多个方向的照片拍摄完成瞬间,倾斜摄影相机的实际空间位置位置与无人机飞控提供的瞬时空间位置信息完全匹配,大幅度提高后期三维建模的几何精度。
[0199]
通过选用的sensor(图像传感器)使用全局曝光,区别于数码相机的卷帘曝光,照片完全不出现果冻效应,零畸变,规避畸变导致的三维建模精度损失甚至建模失败的问题。
[0200]
使用电子快门进行曝光控制,规避使用机械快门导致的快门寿命限制,大幅度提高倾斜摄影相机使用寿命。并且通过高度集成的模块化设计,5镜头设计产品重量控制在400克以内,对比使用数码相机拼接的方案700克以上的重量,大幅减少了无人机的挂载负担,提高作业效率。
[0201]
也就是说,可以实现倾斜摄影或拍照,可以规避相机照片的畸变,可以延长相机快门的使用寿命,可以减少设备抖动幅度,本实用新型方案系统装,装置重量轻,并且可以按照预定设置线路进行飞行运作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。