1.本技术涉及计算机技术领域,特别是涉及一种船舶安保设备管理方法及系统。
背景技术:
2.船舶是一种主要在地理水中运行的人造交通工具。另外,民用船一般称为船,军用船称为舰,小型船称为艇或舟,其总称为舰船或船艇。内部主要包括容纳空间、支撑结构和排水结构,具有利用外在或自带能源的推进系统。外型一般是利于克服流体阻力的流线性包络,材料随着科技进步不断更新,早期为木、竹、麻等自然材料,近代多是钢材以及铝、玻璃纤维、亚克力和各种复合材料。
3.对于大于船舶,其内部均设置有多种安保设备,其中的一部分用于信息检测或者能够对船舶进行控制的专用器材则需要进行特殊的安保管理设置,但是,目前的船舶内对于安保设备管理的方法过于老旧,如指纹解锁或者实体钥匙解锁等管理设施,但是这种管理设施存在极大的不方便,且存在极大的不安全问题。
技术实现要素:
4.基于此,有必要针对上述技术问题,提供一种能够提高对船舶中的安保设备管理的便利性和安全性的船舶安保设备管理方法及系统。
5.本发明技术方案如下:
6.一种船舶安保设备管理方法,所述方法包括:
7.步骤s100:获取对待管理安保设备的使用触发指令;
8.步骤s200:基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;
9.步骤s300:根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;
10.步骤s400:根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态。
11.具体地,所述设备使用允许结果包括图像判定结果、微波轮廓判定结果和微波轮廓判定结果;
12.步骤s300:根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果,具体包括:
13.步骤s310:根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果;
14.步骤s320:当所述图像判定结果为初定可使用待管理安保设备时,则根据所述当
前微波探测信息获取当前触发主体预存的标准微波数据,并将所述当前微波探测信息与所述标准微波人体轮廓数据进行对比,生成微波轮廓判定结果,其中,所述标准微波人体轮廓数据为预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据;
15.步骤s330:当所述微波轮廓判定结果为再定可使用待管理安保设备时,则根据当前指纹光谱信息获取当前触发主体预存的实际主体指纹光谱信息,并将所述当前指纹光谱信息与所述实际主体指纹光谱信息进行对比,生成指纹光谱判定结果,其中,所述实际主体指纹光谱信息为预先基于光谱仪对当前触发主体进行检测并生成的当前触发主体的手指对应的光谱数据;
16.步骤s340:当所述指纹光谱判定结果为指纹光谱匹配指令,则为判断所述当前触发主体是具备所述待管理安保设备的使用权限,当所述指纹光谱判定结果为指纹光谱不匹配指令,则为判断所述当前触发主体不具备所述待管理安保设备的使用权限。
17.具体地,步骤s310:根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果之后,还包括:
18.步骤s311:当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像;
19.步骤s312:根据所述当前环境综合处理图像判断所述当前环境综合处理图像是否与所述标准图像数据匹配。
20.具体地,步骤s311:当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像,具体包括:
21.步骤s3111:当所述图像判定结果为不可使用待管理安保设备时,则根据所述当前微波探测信息对当前触发主体进行三维立体建模处理,并生成初始三维立体图像数据;
22.步骤s3112:对所述当前图像数据作时刻点拆分处理,并分别获取各时刻点对应的实际采集图像数据,其中,一个时刻点对应一个实际采集图像数据;
23.步骤s3113:从各所述实际采集图像数据中筛选出图像画质最高的图像数据,并记为最佳画质图像数据;
24.步骤s3114:将所述最佳画质图像数据与所述初始三维立体图像数据中的各标准点进行对准,圈出所述最佳画质图像数据中的不清晰图像区域,并基于所述初始三维立体图像数据对所述不清晰图像区域进行三维还原,并在三维还原完成后生成当前环境综合处理图像。
25.具体地,步骤s400:根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态,之后还包括:
26.步骤s410:在控制待管理安保设备保持不可用状态后,生成安保设备触碰警示指令;
27.步骤s420:根据所述安保设备触碰警示指令生成安保设备警示提醒,并播报所述安保设备警示提醒,同时基于所述安保设备触碰警示指令将所述安保设备警示提醒发送至
预设的安保管控主体,以提醒所述安保管控主体。
28.具体地,一种船舶安保设备管理系统,所述系统包括:
29.指令获取模块,用于获取对待管理安保设备的使用触发指令;
30.信息获取模块,用于基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;
31.使用判断模块,用于根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;
32.结果生成模块,用于根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态。
33.具体地,所述系统还包括:
34.数据对比模块,用于根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果;
35.轮廓数据模块,用于当所述图像判定结果为初定可使用待管理安保设备时,则根据所述当前微波探测信息获取当前触发主体预存的标准微波数据,并将所述当前微波探测信息与所述标准微波人体轮廓数据进行对比,生成微波轮廓判定结果,其中,所述标准微波人体轮廓数据为预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据;
36.判定结果模块,用于当所述微波轮廓判定结果为再定可使用待管理安保设备时,则根据当前指纹光谱信息获取当前触发主体预存的实际主体指纹光谱信息,并将所述当前指纹光谱信息与所述实际主体指纹光谱信息进行对比,生成指纹光谱判定结果,其中,所述实际主体指纹光谱信息为预先基于光谱仪对当前触发主体进行检测并生成的当前触发主体的手指对应的光谱数据;
37.指纹光谱模块,用于当所述指纹光谱判定结果为指纹光谱匹配指令,则为判断所述当前触发主体是具备所述待管理安保设备的使用权限,当所述指纹光谱判定结果为指纹光谱不匹配指令,则为判断所述当前触发主体不具备所述待管理安保设备的使用权限。
38.具体地,所述系统还包括:
39.使用管理模块,用于当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像;
40.综合处理模块,用于根据所述当前环境综合处理图像判断所述当前环境综合处理图像是否与所述标准图像数据匹配;
41.三维立体模块,用于当所述图像判定结果为不可使用待管理安保设备时,则根据所述当前微波探测信息对当前触发主体进行三维立体建模处理,并生成初始三维立体图像数据;
42.时刻拆分模块,用于对所述当前图像数据作时刻点拆分处理,并分别获取各时刻点对应的实际采集图像数据,其中,一个时刻点对应一个实际采集图像数据;
43.画质图像模块,用于从各所述实际采集图像数据中筛选出图像画质最高的图像数
据,并记为最佳画质图像数据;
44.初始三维模块,用于将所述最佳画质图像数据与所述初始三维立体图像数据中的各标准点进行对准,圈出所述最佳画质图像数据中的不清晰图像区域,并基于所述初始三维立体图像数据对所述不清晰图像区域进行三维还原,并在三维还原完成后生成当前环境综合处理图像。
45.具体地,一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述船舶安保设备管理方法所述的步骤。
46.具体地,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述船舶安保设备管理方法所述的步骤。
47.本发明实现技术效果如下:
48.上述船舶安保设备管理方法及系统,依次通过获取对待管理安保设备的使用触发指令;基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态,也即本发明在获取对待管理安保设备的使用触发指令后,即开启对所述当前触发主体的信息获取,也即获取所述主体基本数据,包括当前图像数据、当前微波探测信息和当前指纹光谱信息,进而实现再当前图像数据、当前微波探测信息和当前指纹光谱信息的数据的基础上的依次判断,并根据判断后生成的设备使用允许结果来实现对待管理安保设备的是否使用的状态改变,较之现有技术中仅通过一种判断依靠基础来判断,本技术通过多种数据来作为判断依据,进而实现对当前触发主体的身份确认,进而实现高效准确地分析,以确保判断当前触发主体是否能够使用待管理设备的准确性,进一步实现准确且高效地实现对船舶内各安保设备的使用,极大提升便利性,且具备较高的保密性。
附图说明
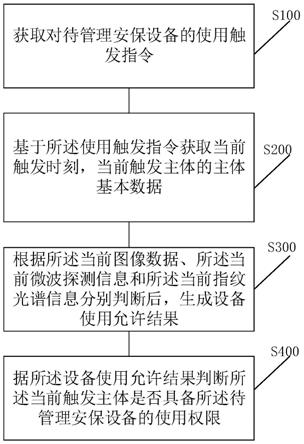
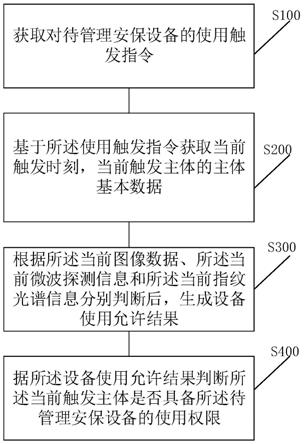
49.图1为一个实施例中船舶安保设备管理方法的流程示意图;
50.图2为一个实施例中船舶安保设备管理系统的结构框图;
51.图3为一个实施例中计算机设备的内部结构图。
具体实施方式
52.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
53.在一个实施例中,提供一种应用场景,以应用本发明所述船舶安保设备管理方法,在待管理安保设备上设置有以电子终端,该电子终端在当前触发主体触发使,可以获取对待管理安保设备的使用触发指令,接着,该电子终端基于所述使用触发指令获取当前触发
时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;然后,根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;接着,该电子终端根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态。
54.在一个实施例中,如图1所示,提供了一种船舶安保设备管理方法,所述方法包括:
55.步骤s100:获取对待管理安保设备的使用触发指令;
56.具体地,当获取对待管理安保设备的使用触发指令时,即为当前触发主体可能需要使用待管理安保设备。当前触发主体为需要使用待管理安保设备的主体,如船舶工作人员、船舶维修人员、船员以及船长。
57.步骤s200:基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;
58.具体地,为了获取更精准地图像,进而通过获取当前触发时刻,当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息。
59.其中,所述当前图像数据为当前触发主体的人脸及躯干信息。
60.所述当前微波探测信息为基于微波感应器探测到的当前触发主体的人体微波信息。所述当前指纹光谱信息为基于光谱分析对当前触发主体检测的指纹所在人体部位的光谱信息。
61.步骤s300:根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;
62.具体地,通过根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断,进而实现层级判断,提升判断结果的准确性。
63.步骤s400:根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态。
64.具体地,当根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限时,则判断为是,那么生成设备可使用指令,同理,若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态,进而实现对待管理安保设备的精准使用管理,提升待管理安保设备的安全可靠性使用。
65.进一步地,所述待管理安保设备包括但不限于船舶驾驶舱操作平台、船舶能源驱动开关以及船舶动力导航系统开关等。
66.在一个实施例中,所述设备使用允许结果包括图像判定结果、微波轮廓判定结果和微波轮廓判定结果;
67.步骤s300:根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果,具体包括:
68.步骤s310:根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果;
69.具体地,首先,根据当前触发主体的外在数据表现,为了实现快速判断,因此首先通过图像的方式来进行判断,也即本步骤中,根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果。
70.其中,所述标准图像数据为预先存储的数据,其对应触发主体,也即,每一个触发主体均对应一个标准图像数据。
71.步骤s320:当所述图像判定结果为初定可使用待管理安保设备时,则根据所述当前微波探测信息获取当前触发主体预存的标准微波数据,并将所述当前微波探测信息与所述标准微波人体轮廓数据进行对比,生成微波轮廓判定结果,其中,所述标准微波人体轮廓数据为预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据;
72.具体地,本步骤中,基于fmcw微波传感器分别获取当前触发主体上的各检测点,进而通过各检测点分别生成所述当前触发主体的整体轮廓的数据,也即本步骤中所述,预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据。
73.考虑到可能不同的环境所采集到的不同的图像数据所带来的误差情况,进而容易发生判断不准确的情况,因此,通过所述预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据,从而实现更精准的对当前触发主体的身份判断。
74.步骤s330:当所述微波轮廓判定结果为再定可使用待管理安保设备时,则根据当前指纹光谱信息获取当前触发主体预存的实际主体指纹光谱信息,并将所述当前指纹光谱信息与所述实际主体指纹光谱信息进行对比,生成指纹光谱判定结果,其中,所述实际主体指纹光谱信息为预先基于光谱仪对当前触发主体进行检测并生成的当前触发主体的手指对应的光谱数据;
75.具体地,接下来,考虑到单纯指纹解锁容易发生误触以及指纹识别不完整导致数据判断慢以及数据判断效率低的问题,因此,本步骤中采取了另一种高效的判断方式,通过光谱的方式来实现更高效地判断。基于不同的人的骨骼密度以及肌肉密度所组成的人体的成分的不同,这样会在光谱上产生差别,因此通过光谱的对比,能够实现精准地差别。
76.更进一步地,较之单纯指纹解锁,通过指纹光谱信息能够快速高效地获取光谱信息,而无需像指纹解锁那种多次录入才能获取完整的手指指纹的数据,因此,通过本步骤中,根据当前指纹光谱信息获取当前触发主体预存的实际主体指纹光谱信息,并将所述当前指纹光谱信息与所述实际主体指纹光谱信息进行对比,生成指纹光谱判定结果,来实现精准判断。
77.步骤s340:当所述指纹光谱判定结果为指纹光谱匹配指令,则为判断所述当前触发主体是具备所述待管理安保设备的使用权限,当所述指纹光谱判定结果为指纹光谱不匹配指令,则为判断所述当前触发主体不具备所述待管理安保设备的使用权限。
78.更进一步地,当判断所述指纹光谱判定结果为指纹光谱匹配指令时,已然经过多次判断,因此,此时判断所述当前触发主体是具备所述待管理安保设备的使用权限。进而,
当所述指纹光谱判定结果为指纹光谱不匹配指令,则为判断所述当前触发主体不具备所述待管理安保设备的使用权限。
79.在一个实施例中,步骤s310:根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果之后,还包括:
80.步骤s311:当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像;
81.步骤s312:根据所述当前环境综合处理图像判断所述当前环境综合处理图像是否与所述标准图像数据匹配。
82.具体地,当所述图像判定结果为不可使用待管理安保设备时,考虑到可能出现环境导致图像采集错误的情况,进而发生判断不准确的情况,因此为了实现精准地判断,本步骤中,将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像,也即所述当前环境综合处理图像综合了所述当前图像数据与所述当前微波探测信息的情况,进而实现更精准判断。
83.进一步地,通过根据所述当前环境综合处理图像判断所述当前环境综合处理图像是否与所述标准图像数据匹配,实现再次判断,提升设备安保管理精度。
84.在一个实施例中,步骤s311:当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像,具体包括:
85.步骤s3111:当所述图像判定结果为不可使用待管理安保设备时,则根据所述当前微波探测信息对当前触发主体进行三维立体建模处理,并生成初始三维立体图像数据;
86.具体地,所述当前微波探测信息为多个探测点组成的完整数据,因此客户根据所述当前微波探测信息来实现三维的还原,也即进行三维立体建模处理,并生成初始三维立体图像数据。
87.步骤s3112:对所述当前图像数据作时刻点拆分处理,并分别获取各时刻点对应的实际采集图像数据,其中,一个时刻点对应一个实际采集图像数据;
88.具体地,所述当前图像数据包括一个时间段内的图像数据,一个时间段内包括了多个时刻点,因此,通过分别获取各时刻点对应的实际采集图像数据,方便后续数据的筛选。
89.步骤s3113:从各所述实际采集图像数据中筛选出图像画质最高的图像数据,并记为最佳画质图像数据;
90.具体地,从各所述实际采集图像数据中筛选出图像画质最高的图像数据,并记为最佳画质图像数据,实现了画质最好的图像的获取。
91.步骤s3114:将所述最佳画质图像数据与所述初始三维立体图像数据中的各标准点进行对准,圈出所述最佳画质图像数据中的不清晰图像区域,并基于所述初始三维立体图像数据对所述不清晰图像区域进行三维还原,并在三维还原完成后生成当前环境综合处理图像。
92.具体地,为了实现更精准判断,因此,通过将所述最佳画质图像数据与所述初始三维立体图像数据中的各标准点进行对准,也即使最佳画质图像数据与所述初始三维立体图
像数据通过标准点对齐,防止出现偏差,标准点预先设置,如脚所在的点,手以及头部所在的点。
93.进一步地,通过圈出所述最佳画质图像数据中的不清晰图像区域,并基于所述初始三维立体图像数据对所述不清晰图像区域进行三维还原,并在三维还原完成后生成当前环境综合处理图像,实现了对图像的还原,并生成所述当前环境综合处理图像,克服了环境不好造成的判断失误问题。
94.在一个实施例中,步骤s400:根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态,之后还包括:
95.步骤s410:在控制待管理安保设备保持不可用状态后,生成安保设备触碰警示指令;
96.步骤s420:根据所述安保设备触碰警示指令生成安保设备警示提醒,并播报所述安保设备警示提醒,同时基于所述安保设备触碰警示指令将所述安保设备警示提醒发送至预设的安保管控主体,以提醒所述安保管控主体。
97.具体地,当控制待管理安保设备保持不可用状态后,但是此时考虑到待管理安保设备已然被触碰,此时为了保证待管理安保设备的安全性以及船舶的内部设备的稳定性,因此,通过生成安保设备触碰警示指令,并根据所述安保设备触碰警示指令生成安保设备警示提醒,其中生成的安保设备警示提醒用于播报,进而使各船舶上的各管理人员知晓,并且,为了更精准地通报给相关人员,进而通过基于所述安保设备触碰警示指令将所述安保设备警示提醒发送至预设的安保管控主体,以提醒所述安保管控主体,从而保证了对待管理安保设备的高效准确管理。
98.综上所述,本发明依次通过获取对待管理安保设备的使用触发指令;基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态,也即本发明在获取对待管理安保设备的使用触发指令后,即开启对所述当前触发主体的信息获取,也即获取所述主体基本数据,包括当前图像数据、当前微波探测信息和当前指纹光谱信息,进而实现再当前图像数据、当前微波探测信息和当前指纹光谱信息的数据的基础上的依次判断,并根据判断后生成的设备使用允许结果来实现对待管理安保设备的是否使用的状态改变,较之现有技术中仅通过一种判断依靠基础来判断,本技术通过多种数据来作为判断依据,进而实现对当前触发主体的身份确认,进而实现高效准确地分析,以确保判断当前触发主体是否能够使用待管理设备的准确性,进一步实现准确且高效地实现对船舶内各安保设备的使用,极大提升便利性,且具备较高的保密性。
99.在一个实施例中,如图2所示,一种船舶安保设备管理系统,所述系统包括:
100.指令获取模块,用于获取对待管理安保设备的使用触发指令;
101.信息获取模块,用于基于所述使用触发指令获取当前触发时刻,当前触发主体的主体基本数据,其中,所述主体基本数据包括当前触发主体的当前图像数据、当前微波探测信息和当前指纹光谱信息;
102.使用判断模块,用于根据所述当前图像数据、所述当前微波探测信息和所述当前指纹光谱信息分别判断后,生成设备使用允许结果;
103.结果生成模块,用于根据所述设备使用允许结果判断所述当前触发主体是否具备所述待管理安保设备的使用权限,若判断为是,则生成设备可使用指令,所述设备可使用指令用于控制待管理安保设备转换为可使用状态;若判断为否,则生成设备不可用指令,所述设备不可用指令用于控制待管理安保设备保持不可用状态。
104.在一个实施例中,所述系统还包括:
105.数据对比模块,用于根据所述当前图像数据获取当前触发主体预存的标准图像数据,并将所述当前图像数据与所述标准图像数据进行对比,生成图像判定结果;
106.轮廓数据模块,用于当所述图像判定结果为初定可使用待管理安保设备时,则根据所述当前微波探测信息获取当前触发主体预存的标准微波数据,并将所述当前微波探测信息与所述标准微波人体轮廓数据进行对比,生成微波轮廓判定结果,其中,所述标准微波人体轮廓数据为预先基于fmcw微波传感器对当前触发主体进行检测并生成的当前触发主体的人体轮廓数据;
107.判定结果模块,用于当所述微波轮廓判定结果为再定可使用待管理安保设备时,则根据当前指纹光谱信息获取当前触发主体预存的实际主体指纹光谱信息,并将所述当前指纹光谱信息与所述实际主体指纹光谱信息进行对比,生成指纹光谱判定结果,其中,所述实际主体指纹光谱信息为预先基于光谱仪对当前触发主体进行检测并生成的当前触发主体的手指对应的光谱数据;
108.指纹光谱模块,用于当所述指纹光谱判定结果为指纹光谱匹配指令,则为判断所述当前触发主体是具备所述待管理安保设备的使用权限,当所述指纹光谱判定结果为指纹光谱不匹配指令,则为判断所述当前触发主体不具备所述待管理安保设备的使用权限。
109.在一个实施例中,所述系统还包括:
110.使用管理模块,用于当所述图像判定结果为不可使用待管理安保设备时,则将当前图像数据与所述当前微波探测信息结合并生成当前环境综合处理图像;
111.综合处理模块,用于根据所述当前环境综合处理图像判断所述当前环境综合处理图像是否与所述标准图像数据匹配;
112.三维立体模块,用于当所述图像判定结果为不可使用待管理安保设备时,则根据所述当前微波探测信息对当前触发主体进行三维立体建模处理,并生成初始三维立体图像数据;
113.时刻拆分模块,用于对所述当前图像数据作时刻点拆分处理,并分别获取各时刻点对应的实际采集图像数据,其中,一个时刻点对应一个实际采集图像数据;
114.画质图像模块,用于从各所述实际采集图像数据中筛选出图像画质最高的图像数据,并记为最佳画质图像数据;
115.初始三维模块,用于将所述最佳画质图像数据与所述初始三维立体图像数据中的
各标准点进行对准,圈出所述最佳画质图像数据中的不清晰图像区域,并基于所述初始三维立体图像数据对所述不清晰图像区域进行三维还原,并在三维还原完成后生成当前环境综合处理图像。
116.在一个实施例中,所述画质图像模块还用于:
117.在控制待管理安保设备保持不可用状态后,生成安保设备触碰警示指令;根据所述安保设备触碰警示指令生成安保设备警示提醒,并播报所述安保设备警示提醒,同时基于所述安保设备触碰警示指令将所述安保设备警示提醒发送至预设的安保管控主体,以提醒所述安保管控主体。
118.在一个实施例中,如图3所示,一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述船舶安保设备管理方法所述的步骤。
119.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述船舶安保设备管理方法所述的步骤。
120.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
121.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
122.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。