1.本发明属于风电持续调频技术领域,具体涉及一种考虑风机最优发电状态动态恢复的风电持续调频方法。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.作为一种高效清洁的可再生能源发电方式,风力发电在过去的几十年来得到迅速发展。然而,风能具有不确定性和间歇性。这些不确定性和间歇性会被运行于最大功率跟踪模式(maximum power point tracking,mppt)非同步并网的主流变速风机引入电力系统,对系统运行带来不利影响。从运行技术层面来看,高风电渗透水平可能将带来频率越限、振荡不稳定,以及电压闪变等问题。从经济层面来看,高风电渗透水平可能导致传统火电机组运行效率降低,并迫使机组增加用于抵消风力波动的运行备用。
4.有学者建议采用储能系统协助风电抑制功率波动和保持频率稳定。但由于储能系统成本较高,对于服务电网运行的大容量配置并不经济。同时研究表明风机的频率响应可以比同步发电机高出几倍。因此,利用风机自身调控能力协助维护电网稳定和经济运行前景广阔。
5.目前,关于风机惯性控制的研究已取得了丰硕的成果,主要可分为以下2类:
6.1)基于频率的惯性控制(frequency based inertia control,fbic)。首先,带恒定控制系数的fbic直接与系统频率耦合,包括下垂控制和微分控制。下垂控制模拟传统机组的一次调频,有助于改善功率扰动下系统频率的最低点(frequency nadir,fn);而微分控制旨在改善功率扰动下的频率变化率(rate of change of frequency,rocof)。这种方法经典实用,但对风速变化的适应性不强,若控制参数不及时调整,可能会导致风机转速越限而被转速保护切除,致使频率二次跌落。反之,风机惯量调控潜力又得不到充分发挥。此外,受“测量
‑
反馈”控制机制的固有滞后特性限制,其频率响应较慢。针对这些问题,有学者提出基于变系数的fbic来应对,取得了较好的效果,但其参数整定计算过程较为复杂。
7.2)基于转子转速的惯性控制(rotor speed based inertia control,rsbic)。为解决fbic响应较慢的问题并确保风机转速运行在稳定区间内,后来有学者提出在风机的“功率
‑
转速”坐标系下针对风机不同运行状态设计功率参考轨迹,并通过“监测
‑
切换”的运行机制控制风机。这类方法可以确保风机在不同风速下释放转动惯量时的快速性、充分性和转速收敛稳定性。然而,目前rsbic本质上与系统频率解耦,风机的惯性响应水平仅取决于其转速,而与频率受扰程度无关。对于大频率扰动,风机的转动惯量可以得到充分释放。在高风电渗透率下承受较小的频率扰动时,可能会出现惯量释放不当导致频率反冲的现象。这种频率的往复变化不但不能改善系统调频特性,可能还会引发过频切机。此外,基于监测频率偏差的调频触发机制与rsbic的状态切换机制在变风速下难以配合,限制了rsbic在实际工况下的调频应用。
8.除利用风机转动惯量,有学者引入风机背靠背换流器间直流环节电容的惯性响应参与调频。典型方法是沿用下垂控制和微分控制,通过电容能量的快速吞吐平抑小功率波动。但当系统遭受较严重频率事件时,电容电压将可能被钳制在其稳定运行范围界限上。即直流环节仅在频率扰动开端参与调频,若不重建其电压水平,将无法参与后续调频。此外,一方面考虑到换流器的电流限制,低电压水平将使风机最大功率输出下降;另一方面,风机直流环节运行在较高电压水平将加重其绝缘疲劳。
技术实现要素:
9.本发明为了解决上述问题,提出了一种考虑风机最优发电状态动态恢复的风电持续调频方法,本发明在实现风机转子转速动态恢复的同时权衡其惯性调频性能,解决了由传统对称系数调节方式所带来的正反馈抑制问题。
10.根据一些实施例,本发明采用如下技术方案:
11.一种考虑风机最优发电状态动态恢复的风电持续调频方法,包括以下步骤:
12.将直流环节电压与频率耦合,赋予其频率响应能力,附加旨在消除电容电压偏差的自适应积分控制,合成直流环节运行电压参考值,以实现调频过程中动态恢复直流环节荷电状态;
13.根据正比风机转动惯量的修正系数确定下垂控制系数上限,根据转子运行状态在调频期间释放合理的转动惯量,将下垂控制系数与系统频率状态耦合,使其能随着电网频率的渐近稳定而解除风机惯性控制信号,驱动风机转速向最优转速恢复。
14.作为可选择的实施方式,将直流环节电压与频率耦合时,利用利用比例
‑
微分控制来实现。
15.作为可选择的实施方式,附加旨在消除电容电压偏差的自适应积分控制中,积分的系数计算方法为:
[0016][0017]
其中:a
i
(0,由系统可容忍rocof和留有一定裕度的允许频率偏差决定;表达式右侧的(f
‑
f0)(df/dt)是一个动态调整项,控制积分系数朝着合理的方向调整来有序重建电容电压。
[0018]
作为进一步的限定,当频差(f
‑
f0)和频率变化率符号相同时,下调积分控制系数,让虚拟惯性控制占据主导地位。
[0019]
作为可选择的实施方式,确定下垂控制系数上限时,考虑到风机机械惯性和电力系统惯性远大于调节风机模拟惯性控制信号所需的时间,即此时风机出力的变化率取决于其附加惯性控制信号的变化率,以防止其被快速下调而带来显著功率缺额造成频率冲击。
[0020]
作为可选择的实施方式,将下垂控制系数与系统频率状态耦合的具体过程包括基于逻辑回归函数曲线调节系数将下垂控制系数与系统频率状态耦合。
[0021]
作为可选择的实施方式,在下垂控制过程中,引入惩罚项,使下垂增益调节不对称化,协同抑制正反馈效应引起的功率振荡。
[0022]
当频率偏差和惩罚项符号相同时,需要风机提供充分的惯性支持时,下垂系数的取值上限进行上调;当频率偏差和频率变化率符号不同时,下垂增益上限将被惩罚项挤压
到较低水平,以抑制参数变化引起的正反馈问题。
[0023]
一种考虑风机最优发电状态动态恢复的风电持续调频系统,包括:
[0024]
直流电压控制模块,被配置为利用比例
‑
微分控制将直流环节电压与频率耦合,赋予其频率响应能力,附加旨在消除电容电压偏差的自适应积分控制,合成直流环节运行电压参考值,以实现调频过程中动态恢复直流环节荷电状态;
[0025]
下垂控制模块,被配置为根据正比风机转动惯量的修正系数确定下垂控制系数上限,根据转子运行状态在调频期间释放合理的转动惯量,将下垂控制系数与系统频率状态耦合,使其能随着电网频率的渐近稳定而解除风机惯性控制信号,驱动风机转速向最优转速恢复。
[0026]
一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述方法中的步骤。
[0027]
一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成上述方法中的步骤。
[0028]
与现有技术相比,本发明的有益效果为:
[0029]
本发明通过改进直流环节惯性控制,以实现持续参与小频率波动抑制,同时不引起其他频率问题;
[0030]
本发明通过面向动态转子速度恢复的风机转动惯量惯性管理,可以得更高的发电效率和更充足的稳定转子运行裕度,从而实现持续参与频率调节,同时解决惯性错位匹问题、优化风机在不良风速爬坡和连续功率扰动下的运行状态。
[0031]
本发明通过补充惩罚项使下垂控制参数关于频率变化状态不对称化来抵偿正反馈下垂系数调节引起的功率振荡。
[0032]
本发明风机在电网频率正常时,运行在mppt状态;当频率急剧偏移时,通过模拟惯性控制调控转动惯量和直流环节电能协助系统调频,并随着系统频率渐近稳定,逐渐解除附加惯性控制信号来动态恢复风机运行状态,充分利用了换流器接口的功率调控灵活性,具有较大的应用前景。
[0033]
为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
[0034]
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
[0035]
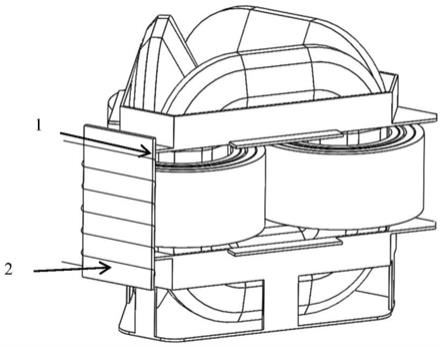
图1是双馈风机典型结构;
[0036]
图2是双馈风机运行特性;
[0037]
图3是考虑荷电状态有序重建的改进直流电压下垂控制;
[0038]
图4是自适应积分系数,k
i0
:0.02;
[0039]
图5是双馈风机在传统虚拟惯量控制下的频率响应特性;
[0040]
图6是惯性控制的设计框架和原则;
[0041]
图7是旨在实现转速动态恢复的非对称下垂控制;
[0042]
图8是所提下垂控制系数特性,δ=0.02;
[0043]
图9是在低频下由对称可逆惯性系数调节引起的正反馈功率振荡;
[0044]
图10是仿真系统模型;
[0045]
图11是仿真实施例所用的风速序列;
[0046]
图12是本发明方法变积分系数下直流电压重建的仿真结果;
[0047]
图13是旨在验证有序直流电压重建无害性的仿真结果;
[0048]
图14是旨在验证所提策略可持续调频有效性的仿真结果;
[0049]
图15是不同下垂系数减小速率限制下的仿真结果;
[0050]
图16是仿真实施例3的仿真结果;
[0051]
图17是仿真实施例4的仿真结果;
[0052]
图18是仿真实施例5的仿真结果,rl:0.02.k
i0
:0.02。
具体实施方式:
[0053]
下面结合附图与实施例对本发明作进一步说明。
[0054]
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
[0055]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0056]
一种面向风机惯量动态恢复的风电调频方法,主要包括以下改进:
[0057]
1)揭示本质上作为一种负反馈控制,包括下垂控制和微分控制的典型虚拟惯性控制会导致风机转子转速在连续频率调节下偏离其稳定运行区域。
[0058]
2)提出动态恢复风机直流环节电压水平以满足其持续参与平抑小功率波动的需求。
[0059]
3)提出一种非对称下垂控制以实现风机转子转速动态恢复(dynamic rotor speed recovery,drsr)同时权衡其惯性调频性能,强调并解决了由传统对称系数调节方式所带来的正反馈抑制(positive feedback suppression,pfs)问题。
[0060]
双馈风机运行特性
[0061]
本部分主要介绍双馈风机的运行特性。图1给出了双馈风机的典型结构,包括风机的控制系统、两质量块转动轴和机械动力部分。
[0062]
首先,双馈风机的控制系统由转子侧换流器(rotor side converter,rsc)和网侧换流器(grid side converter,gsc)组成。转子侧换流器调节注入电力系统的有功功率和无功功率,以及负责mppt控制;网侧换流器负责维持直流环节电压和接入系统公共连接点处电压。此外,桨距控制器用于调节风机转速在稳定运行区间内。
[0063]
风力机从风中捕获到的输入机械功率p
m
由式(1)确定:
[0064][0065]
式中:ρ、c
p
、λ、β、r和v分别代表空气密度、风能捕获效率系数、叶尖速比、桨距角、
桨叶半径和风速。
[0066]
c
p
(λ,β)的计算式为
[0067][0068]
其中,
[0069][0070]
风机mppt运行模式下的参考输出电磁功率p
mppt
为
[0071][0072]
式中:λ
opt
是风机捕获最大风功率时的最佳叶尖速比;在本发明中,当β=0时λ
opt
设为9.95,此时c
p
取到最大值c
p,max
;ω
r
为风机转子转速;k是一个中间计算常数,取值为0.52。
[0073]
然后,风机的两质量块轴系传动模型可由式(5)描述:
[0074][0075]
式中:h
t
、ω
t
和t
t
分别是风力机质量块的惯性时间常数、角速度和扭矩;k
s
、θ
s
和d
s
分别是轴系刚度系数、扭转系数和阻尼常数;h
g
、d
g
和t
g
分别是发电机质量块的惯性时间常数、阻尼常数和扭矩;ω是角速度基准值。
[0076]
考虑到在一定转速下过度提升功率会导致过重的机械疲劳,如图2和式(6)所示,风机功率上限,p
limit
,和转矩限制,t
limit
,分别设为1.1p.u.和1.07p.u.,以保护风机机械传动系统。
[0077]
p
e
≤p
limit
=ω
r
t
limit
ꢀꢀ
(6)
[0078]
此外,风机功率变化率限制为0.45pu/s。双馈风机转子稳定运行区间为0.7~1.3pu。至此,可由图2总结dfig的功率
‑
转速运行特性。
[0079]
所提惯量控制方法:
[0080]
一般地,模拟惯性控制通过调控存储在变速风机中的转动惯量参与系统调频。风机输出电磁功率和输入机械功率之间由此产生不平衡而使风机转速偏离mppt运行状态。本部分对所提策略中考虑荷电状态有序重建的改进直流电压控制和面向转子转速动态恢复的变系数下垂控制进行阐述。
[0081]
改进的具有动态恢复能力的直流环节电压下垂控制
[0082]
在典型工况下,风机网侧换流器控制直流环节电压恒定,与系统频率解耦,因此储存在直流电容的能量不会参与风机的功率调节过程。相比之下,通过调动风机转子转动惯量产生的调频响应要比直流环节电容能量的吞吐更慢,所以后者更适于用来平抑小功率波动。
[0083]
通常,沿用包括下垂和微分环节的虚拟惯性控制来调动直流环节参与调频。然而此情况下,当系统中发生长时间的频率事故,风机直流环节会由于持续承受调频压力而发生电压持续偏移,最终在达到其运行电压偏移限制(
±
0.1pu)后会失去一侧(吸收或释放电能)继续参与调频的能力。并且,正如上面中所提到的,考虑换流器电流限制和对直流环节绝缘的影响,长期运行于偏差过大的直流环节电压会对风机不利。
[0084]
为此,本发明提出一种考虑荷电状态有序重建的改进直流电压控制方法,旨在调频过程中动态恢复直流环节荷电状态,增强其持续参与调频的能力。改进直流电压下垂控制的逻辑框图如图3所示。
[0085]
首先,通过比例
‑
微分控制将直流环节电压与频率耦合,赋予其频率响应能力。进一步地,附加旨在消除电容电压偏差的自适应积分控制来合成直流环节运行电压参考值。其积分系数k
i
计算式为
[0086][0087]
其中:a
i
(0,由系统可容忍rocof和留有一定裕度的允许频率偏差决定;表达式右侧的(f f0)(df/dt)是一个动态调整项,控制积分系数朝着合理的方向调整来有序重建电容电压。
[0088]
如图4所示,当频差(f f0)和频率变化率符号相同时,下调积分控制系数,让虚拟惯性控制占据主导地位。当频差和频率变化率符号不一致时,表示系统频率正在恢复,由此增强风机直流环节的积分控制作用将直流电压拉回到额定运行状态。值得一提的是,由p
c
=u
dc
cdu
dc
/dt并且u
dc
仅在1p.u.临近区间波动可知,电容电压变化率越大,其吞吐的附加惯性功率p
c
越大。因此,与用于抑制频率急剧偏移而快速调压产生的惯性功率相比,在进行直流环节荷电状态重建时较缓的电压恢复速率给风机输出带来的影响可忽略不计。
[0089]
旨在实现转子转速动态恢复的变系数下垂控制
[0090]
现有风机惯性控制研究主要注重于提升电力系统调频和功率波动抑制的性能,对持续调频下风机的运行状态关注较少。然而风机在贡献转动惯量参与调频之后,其转速将不可避免地偏离mppt运行点,导致发电效率降低,甚至威胁到风机的稳定并网运行。
[0091]
如图5所示,当风机处于已渡过频率最低点后的暂稳定状态(如运行点a)时,下垂控制在mppt功率基准p
mppt
上施加的附加惯性功率指令k
p2
δf持续存在,致使风机转子转速收敛到次优运行点ω2,偏离最大发电效率运行状态。同时,随着下垂系数k
p
的增大,转子转速偏移mppt运行点越远,发电效率下降越严重。值得注意的是,向下的风速爬坡(风速由风i下降到风ii)或在二次频率扰动下,由于给定输出功率参考和风机当前转速下所摄入风能不协调,惯性控制可能会给风机带来严峻的正反馈功率调节压力。
[0092]
进一步地,由图5可知,对于高风电渗透率电力系统,每当电网频率新建立一个暂稳态(设为f1),风机也将进入一个暂稳态,如图5中的ω1。进入该运行点后,若电网功率缺额不变,则此时电网和风机运行状态(f1,ω1)与正常运行时的(f0,ω0)对于同步机一次调频与风电的pd虚拟惯性反馈控制要维持的状态无本质区别。但由于整个电力系统容量更大,因而在系统频率变化较不明显的情况下,风力波动带来的功率调节压力大部分由风机承受而错失恢复转速来获取更高发电效率的时机,即使恢复转速后捕获的风电功率能使系统频差减小。因为这意味着要偏移(f1,ω1)而受到pd负反馈惯性控制的抑制。这种由惯性控制引
入的风机给定参考功率和捕获的风能之间不协调的运行方式会使风机转速持续偏移,本发明将其称为惯性错位匹配。特别地,当风机转速收敛于某一风速下的临界转速(如风i下的ω2)或其附近转速运行裕度较低的运行点时,这将增大转速越限切机的风险。
[0093]
此外,考虑到风电环流器接口提供的快速响应能力,应重新评估惯性响应的下垂系数取值设置,以区别于传统发电机组。也就是说,用于一次频率调节的换流器的下垂增益和微分增益的设置范围可以被扩大,以充分发挥其灵活的功率控制能力。柔性控制的灵活性(例如fbic)可以与刚性控制(例如rsbic)所赋予的稳定性相结合。如图6所示,建议通过扩展虚拟惯性控制的增益来改善风机的惯性响应,以接近rsbic可以模拟的“无穷大惯性”特性。rsbic的刚性功率限制可赋予参与系统调频期间风机运行稳定性。总的来说,惯性控制应当是灵活的,如fbic,从本质上避免rsbic在调频机制触发和功率控制状态切换的配合冲突。
[0094]
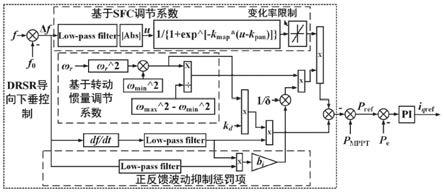
由以上分析可知,解除由下垂控制附加的惯性控制信号可以驱动风机转速恢复。进一步地,结合具有转速恢复能力的rsbic的运行机理和系统频率动态特性方程可知,在进行风机转速恢复时,解除惯性控制信号的过程应有序平稳进行,以减轻二次频率冲击。为此,我们面向风机转子转速动态恢复,基于逻辑回归函数曲线(sigmoid function curve,sfc)设计了一种变系数下垂控制,其逻辑结构如上图7所示。
[0095]
其中,面向转子转速动态恢复的下垂控制系数k
p
的表达式为
[0096][0097]
式中:δ为风机的基础调差系数;b
i
是用于有效调节k
p
以应对潜在的由参数调节引起的正反馈功率调节问题;k
map
和k
pan
分别为逻辑回归曲线(sigmoid function curve,sfc)的映射因子和平移因子;ω
min
和ω
max
分别为风机的最小和最大转速;rl为下垂系数的变化率下限;k
p
'为前一个计算周期中k
p
的取值;δt为计算周期。
[0098]
至此,所提控制方法赋予了如上图8的下垂控制系数特性。即先用正比风机转动惯量的修正系数(ω
r2
–
ω
min2
)/(ω
max2
–
ω
min2
)确定k
p
上限,根据转子运行状态在调频期间释放合理的转动惯量。再通过sfc调节系数1/{1 exp
{kmap[(df/dt)kpan]}
}将下垂控制系数与系统频率状态耦合,使其能随着电网频率的渐近稳定而解除风机惯性控制信号k
p
δf,驱动风机转速向最优转速(最优叶尖速比对应转速)恢复。设置下垂系数变化率限制是考虑到风机机械惯性和电力系统惯性远大于调节风机模拟惯性控制信号所需的时间,即此时风机出力的变化率主要取决于其附加惯性控制信号的变化率。因此,限制下垂系数k
p
的变化率即防止其被快速下调而带来显著功率缺额造成频率冲击。
[0099]
总的来说,结合值域控制及其变化率维度的非对称增益设计,一方面,该方案能够自适应地、有效地响应频率变化。另一方面,当电力系统进入rocof较小的状态时,风机转子转速可以有序地恢复,而不会因急剧调整控制参数而产生二次频率冲击。即使如图9所示,当k
p
随rocof的变化可能会引起正反馈功率振荡问题,但所提出的基于sfc的非对称下垂系
数调整天然具有对rocof较为不敏感的过渡区间,用于抑制正反馈问题引起的小扰动。此外,所提策略还引入惩罚项b
i
δfdf/dt使下垂增益调节不对称化,协同抑制正反馈效应引起的功率振荡。也就是说,当频率偏差(f
‑
f0)和df/dt显示相同的符号提示需要风机提供充分的惯性支持时,下垂系数的取值上限会被调得更高。当频率偏差(f
‑
f0)和rocof显示不同的符号时,下垂增益上限将被惩罚项挤压到低水平,以抑制参数变化引起的正反馈问题。
[0100]
仿真模型
[0101]
如图10所示,我们在接入一dfig聚合风电场的典型四机系统作展开对所提策略的验证研究。该系统共有恒定有功负荷1400mw,3台额定容量为900mva的同步发电机。每台同步机都配有调速器、ieee i型调压器和励磁系统。同步机的惯性时间常数均为6.5s,调差系数为5%,调频死区设为0。
[0102]
下面表1给出了双馈风机的基本参数,所提策略的有关参数由表2给出。
[0103]
表1双馈风力发电机参数
[0104][0105]
表2所提策略基本参数
[0106][0107]
仿真验证
[0108]
本部分首先在仿真实施例1
–
2中,研究了在sg3于120.0s被切除时,所提策略在不同控制参数设置下的调频性能。然后,在仿真实施例3展示了所提策略与典型频率惯性控制(frequency based inertia control,fbic)、基于转动惯量的频率惯性控制(kinetic energy based fbic,kefbic)和mppt控制的调频性能对比。为了强调动态恢复转子转速对可持续频率调节的必要性,在仿真实施例4中研究了遭受连续功率扰动情景下,当风电采用不同控制方法时系统的调频性能。最后,在仿真实施例5中进行了所提风电功率校正和扩展下垂系数取值设置的有效性验证,以改进在变化风速条件下可能会引起正反馈功率振荡问题的可逆下垂参数调节方法。图11给出了各仿真实施例中所用的风速序列,风电渗透水平均设置为37.5%。
[0109]
所提策略的调频性能受其下垂系数取值不确定性的影响,即其向下调节参数的变
化率限制rl,需要在双馈风机转速恢复速率及其调频性能之间权衡。除了与转动惯量管理相关的参数rl外,本部分还研究了所提策略在直流环节能量管理中不同基础积分系数下的性能。
[0110]
仿真实施例1:直流环节电能调控中不同积分增益下所提策略的调频性能研究。如图12所示,由于直流环节能量远小于风机存储的转动惯量,电容能量的变化对风机的整体输出影响较小。图13和图14则表明调控直流电容能量能抑制较小的功率波动。一方面,图13显示在对直流电压进行较缓速率的恢复控制时,不同积分增益下双馈风机的输出几乎相同;另一方面,图14显示在258~280s期间,传统虚拟惯性控制下(k
i
=0)的风机直流环节由于频差较大,经短暂放电后其电压便被钳制在运行区间边界(1100v),从而失去继续参与抑制频率向下偏移的能力。相比之下,改进电压控制动态恢复了直流环节的荷电状态,使其在大扰动的后续能继续参与调频。特别地,积分增益越大,直流电压重建得越快。但通过积分控制重建直流环节电压与体现其虚拟惯性之间相互制约,限制了积分增益的取值。
[0111]
仿真实施例2:不同自适应下垂系数减小速率限制下所提策略的调频性能研究。如图15(a)、(b)所示,在大频率扰动开端(sg3于120s被切除)和遭遇显著向下风速爬坡时(160s~190s和200s~280s),系统频率发生跌落。此时,所提策略能保持作为惯性控制抬升频率最低点和抑制频率波动的能力。图15(b)、(c)表明,在抑制fn后,所提策略能随着系统渐近收敛到具有较小rocof的暂稳态时,平缓地下调风电功率以驱动风机转速动态恢复。同时结合图15(d)可知,下垂系数减小速率限制的放宽(rl变大)能加速风机转速恢复,但也会因加速调整风电功率而引起更显著的频率波动。即在转子转速动态恢复和体现风电调频惯性间存在一个折衷把握。
[0112]
不同风机惯性调频策略的控制效果分析
[0113]
基于策略控制参数的取值分析,将本发明策略(rl:0.02,k
i
:0.02)的控制效果与典型固定系数fbic(δ:2%,k
d
:46.6)、kefbic和mppt控制比较,以突出动态恢复风机最优状态对风电可持续参与调频的重要性。
[0114]
仿真实施例3:不同惯性调频策略的控制效果研究。如图16(a)、(c)所示,在频率事件发生时,在所提策略下风机释放了与kefbic和典型fbic相同水平的转动惯量,各惯性控制在抑制fn方面的效果几乎相同。而图16(c)、(d)表明,随着系统频率在相对稳定的风况和负荷条件下渐近稳定,本发明策略能使双馈风机恢复到接近mppt的状态,获取更高的发电效率,并为持续调频储备更充分的转子动能。可以看到,由于典型fbic没能及时矫正风机行使惯性的运行基准点,让变风速下风机摄入风能与输出电能之间的错位匹配不断累积,会导致风机转速偏移严重,转速运行裕度低。这揭示了在由典型fbic控制时更平稳的电网频率表面下,有着风机因转速偏移过大而被切机的隐患。而由图5分析可知,二次频率扰动和向下爬坡的风况都能加速该隐患暴露。
[0115]
仿真实施例4:不同风机惯性调频策略在系统遭受连续频率事件时的控制效果分析。风机调频能力取决于其存储的转动惯量,这不仅受风况影响,还受风机控制方法影响。本仿真实施例进一步研究系统连续遭受频率事件时不同风机调频策略的控制效果。仿真实施例4设置了2个功率扰动事件,一是在120s切除同步发电机sg3,二是在170s时load 1突增50mw。
[0116]
仿真结果表明,对于典型fbic,与系统频率状态缺乏配合的刚性惯性控制阻碍风
机在系统频率渐近稳定时(参见图17中140s~170s和240s~280s)进行转速恢复。风机在其惯性控制所维持运行基准点的错位下,摄入功率与输出功率持续不协调,致使其转速不断偏移、发电效率显著降低,并最终于272s因过度减速而被转速保护切除,带来严重的二次频率冲击。与典型fbic相比,风机在kefbic控制下能根据自身存储的转动惯量来调整下垂控制系数,从而提高了发电效率和转速运行裕度,确保风机不会过度减速。然而结合图4分析可知,kefbic的控制逻辑决定了其在风机转速降至最低转速或系统频差消除前,无法完全解除施加在风机功率参考上的惯性控制信号,即kefbic不能使风机与系统频率状态相协调来进行更充分的转速恢复。相比之下,图17(a)、(b)表明,当系统频率趋于稳定时本发明策略能有序地解除惯性功率信号来动态恢复转子转速,并在频率急剧偏移时使风机表现出充分的惯性响应。
[0117]
扩展下垂系数及修正对称可逆参数调节所引起正反馈功率振荡问题研究
[0118]
仿真实施例5,扩展下垂增益的建议以及由可变下垂增益引起的正反馈功率振荡问题研究:本实施例研究了具有扩展下垂增益的所提方案的性能,以验证扩展下垂增益设置的潜在益处和由可逆增益调节引起的正反馈功率振荡问题。仿真实施例5设有2次功率扰动,一是在120s时切除sg 3,另一处为在170s时load1下调50mw。
[0119]
从图18可以看到,通过将δ从2%扩展到0.67%,当系统频率显著偏离时,风机表现出了更充分的惯性响应,更有助于系统频率波动平抑(参见图18中的120s
‑
150s和200s
‑
250s)。所提策略更充分利用了换流器的功率调节能力,区分开来了换流器和常规发电机组的响应特性,验证了其合理性。对于前面图10中分析的正反馈功率振荡问题,当load1在170s下调时,作为一种惯性控制,应该降低输出以抑制频率波动,但未配备pfs下的变系数下垂控制却使得风机增加功率输出,与其在仿真实施例4下的响应方向相同(当load1在170s增加时),这是由可逆下垂系数调节引起的,加剧了系统频率波动(参见170s的浅蓝色曲线)。值得注意的是,在相对稳定的负荷和风速条件下,这种现象不容易暴露出来,使得其在仿真对称可变下垂系数调节方法时可能会被忽略。最后,如图18中的深蓝曲线所示,本发明所提策略在引入惩罚项以使下垂系数调节对于频率状态变化不对称后,能使该不良参数调节方式和正反馈功率振荡受到显著抑制。
[0120]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0121]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0122]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指
令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0123]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0124]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0125]
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。