1.本发明涉及跳伞模拟设备技术领域,具体涉及一种虚拟现实跳伞模拟训练体感控制装置及方法。
背景技术:
2.跳伞是空降兵、特种作战部队、海军陆战队及飞行员等军兵种必须具备的一项基本技能。是空降兵进入战场的主要方式之一。跳伞地面训练一直以来是新兵入伍训练、部队跳伞技能提高的一项重要内容。北京航宇荣康科技股份有限公司的徐雅冬、齐东辉等人的发明专利用于伞兵训练模拟器中的操纵与动感仿真系统(cn 107154194 a),受训者通过拉动手上的操伞绳,带动拉线传感器动作,拉线传感器将受训者动作参数传递给主控制器,主控制器通过动感导向轮和动感连接绳配合步进电机可以控制受训者做上下运动,从而实现模拟跳伞的效果;燕山大学的张祝新、柴慧的发明专利一种延时跳伞训练模拟平台(cn 109147452 a),在支架上梁中部设有载物台,其上设有旋转机构,在旋转机构的旋转平台上设有拉伸机构,在旋转平台下面设有模拟吊挂伞绳机构。旋转平台以一定的速度旋转控制风速模拟跳伞时的风阻,使受训者模拟跳伞时在空中状态和旋转时的方向感。
3.对于完成地面基础训练即将进行飞机实跳的新兵,需要通过体验逼真的空中降落过程,固化离机着陆姿态和空中操纵动作,解决跳伞过程中的空间感知紊乱、头脑晕眩以及心理恐惧感等。因此在跳伞模拟训练的过程中要尽可能多方位的模拟跳伞全过程,才能有更好的跳伞模拟训练效果。
4.但是专利cn 107154194 a采用两个操伞绳配合拉线传感器、主控制器和步进电机,只能模拟跳伞过程中的左右摇摆这一种情况;专利cn 109147452 a通过转转机构和拉伸机构可以模拟跳伞过程中的旋转和左右摇摆两种情况。两者的模拟训练内容单一,方法简陋,并且没有配套的体感系统及虚拟现实系统配合。在该种模拟训装置的训练下容易使受训者各种感知器官紊乱,产生晕眩感,严重降低了训练效果和效率,训练效果较差。
技术实现要素:
5.本发明提出的一种虚拟现实跳伞模拟训练体感控制装置及方法,通过设计一整套传感器系统和plc实现虚拟现实跳伞模拟训练的体感模拟和仿真,针对实际跳伞训练需求,采用交互式模拟操纵,将体感和虚拟现实模拟配合运用,增加跳伞模拟训练的逼真性和真实感,营造4d模拟训练体感感受,实现跳伞模拟训练从离机、坠落、开伞、操纵和着陆的全过程的模拟,从而增强空降兵跳伞训练效果、提高训练效益、缩短训练周期、降低训练成本。
6.本发明公开的技术方案如下:一种虚拟现实跳伞模拟训练体感控制装置,包括离机训练组件、升降模拟组件、滑动小车、升降台、载车架;其中,离机训练组件用于固定安装在训练场地,离机训练组件的前侧与升降模拟组件的后侧接触并固定连接,离机训练组件的内部固定安装有供滑动小车滑动的导轨,
升降台安装在升降模拟组件的顶部,载车架的起始位置固定在升降模拟组件的内部用于供滑动小车沿导轨滑入其内部,载车架位于升降台的下方,载车架内设有用于固定滑动小车的固定机构,升降台上安装有用于驱动载车架上下运动的驱动机构。
7.在上述方案的基础上,作为优选,离机训练组件包括三段式轨道和安装支架,三段式轨道固定安装在安装支架的内部。
8.在上述方案的基础上,作为优选,升降模拟组件包括升降轨道、滑块组件和升降轴,升降轨道共有四条分两组安装在升降模拟组件的内侧,滑块组件位于任一组的两条升降轨道之间并与升降轨道滑动配合,滑块组件与升降轨道通过凹槽配合连接,升降轴的两端穿过滑块组件,升降轴位于升降模拟组件的内部。
9.在上述方案的基础上,作为优选,滑动小车包括小车框架、移动轮组、双肩控制电机,移动轮组对称安装在小车框架的两侧,移动轮组与三段式轨道上滑动,双肩控制电机安装在小车框架的内侧。
10.在上述方案的基础上,作为优选,升降台包括升降台框架、顶部安装板、卷筒机构、升降控制电机、前导向轮组、后导向轮组,升降台框架固定安装在升降模拟组件的顶部,顶部安装板通过螺栓组固定在升降台框架的顶部,卷筒机构和升降控制电机安装在顶部安装板的顶部,拉线传感器与升降控制电机电性连接,前导向轮组安装在升降台框架的顶部的内侧,后导向轮组安装在升降台框架的顶部的外侧。
11.在上述方案的基础上,作为优选,载车架包括载车架框架,升降杆和电磁铁。载车架框架位于升降模拟组件的内部,升降杆固定在载车架框架的顶部前侧,电磁铁安装在载车架框架的顶部后侧。
12.在上述方案的基础上,作为优选,多项感应控制组件包括光栅传感器、接近开关、plc设备、指示开关,光栅传感器安装在小车框架的内侧,接近开关安装在载车架上用于感应滑动小车进入载车架,指示开关安装在安装支架的外侧,plc设备固定安装在安装支架的内部下方。
13.在上述方案的基础上,作为优选,滑动小车的起始位置在离机训练组件的内部,训练前接通电源,红灯闪烁,指示控制柜正在上电,按下绿灯,plc上电执行找零位程序,零位找到后,电控柜白灯亮起,同时按键指示灯绿灯闪烁,上述流程完毕表示训练状态就绪,开始设置初始参数,包括伞型选择、跳伞是否出特情、风力风向、是否离机、下降脉冲数,脉冲频率,滑动小车就位后,plc感应到滑动小车就位并显示可以训练指示,跳伞人员三步离机,通过光栅传感器,光栅传感器感应到人员通过,置离机状态完成,滑动小车滑沿安装在离机训练组件内部的三段式滑轨滑入载车架,安装在载车架上的接近开关感应到小车进入,plc接收信号将电磁铁锁定,滑动小车在载车架内锁定,plc发脉冲控制两台大功率电机牵引钢丝绳悬挂的载车架突降模拟离机失重,在下降一段时间后,电机停止,模拟人员开伞冲击,如果开伞正常,人员可通过连接拉线传感器的操纵绳控制伞的方向,plc采集操纵量反馈到上位机虚拟现实程序中模拟伞飞行方向改变,同时两台小功率电机根据操纵量和左右操纵绳提升人的左右肩,模拟翼伞飞行时,人体姿态左右倾斜;如果伞未开,人员可以拉拔穿戴设备上的门锁开关拔销,模拟打开备份伞或者飞伞,进行特情训练,着陆时,plc输出脉冲,两台大功率电机加速转动,模拟跳伞员下降着陆,训练完毕后,按黄色开关秒,实现升降台
升降到零位,解开电磁锁,小车可以拖动出载车架,plc复位,准备下一次训练。
14.与现有技术相比,本发明具有以下有益效果:1.通过接近开关感应运动小车就位、小车是否进入载车架内、载车架找零位及与斜轨道对轨,可以实现对模拟跳伞过程的监测,确保训练过程流畅性及安全性。
15.2.通过plc发射脉冲控制电机转动,可以实现载车架突降,模拟离机失重训练;两电机差分运动,可以模拟翼伞操纵抬头减速训练;下降一段时间后电机突然停止,可以模拟人员开伞冲击训练。
16.3.通过门锁开关,可以实现模拟打开备份伞或者飞伞,进行特情训练。
17.4.通过plc和传感控制逻辑,可以实现跳伞离机的循序控制,提高系统运动的可靠性。
18.5.通过拉线传感器采集伞绳的操纵量,可以将采集操纵量反馈到上位机虚拟现实程序中模拟伞飞行方向改变及训练。
附图说明
19.图1为本发明的结构示意图;图2是滑动小车的结构示意图;图3是升降台的结构示意图;图4是载车架的结构示意图;图5是本发明工作原理的系统框图。
具体实施方式
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
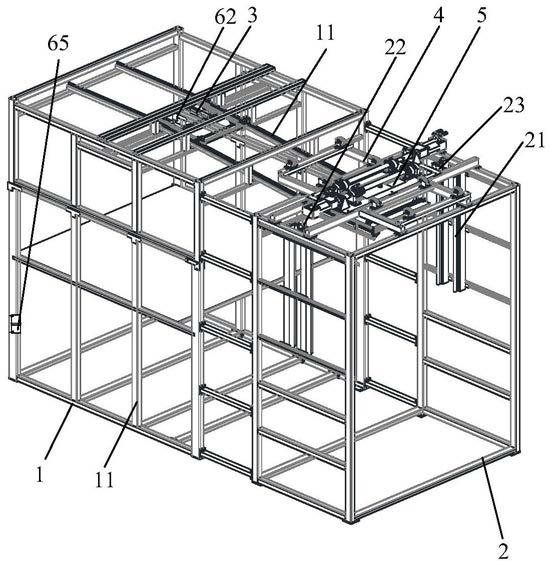
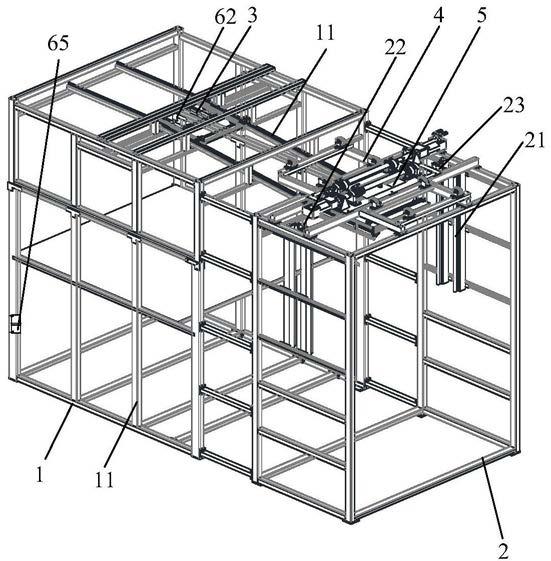
21.如图1至图5所示,一种适合多伞型跳伞训练的虚拟现实体感交互运动装置包括离机训练组件1、升降模拟组件2、滑动小车3、升降台4、载车架5和多项感应控制组件6。
22.其中,离机训练组件1固定安装在训练场地,升降模拟组件2位于离机训练组件1的前侧,离机训练组件1的前侧与升降模拟组件2的后侧接触,并通过螺栓连接。滑动小车3的起始位置在离机训练组件1的内部,升降台4安装在升降模拟组件2的顶部,载车架5的起始位置位于升降模拟组件2的内部,载车架5位于升降台4的下方。多项感应控制组件6包括光栅传感器61,接近开关62,plc设备63,拉线传感器64和指示开关65。
23.如图1所示,离机训练组件1包括三段式轨道11和安装支架12。
24.其中,三段式轨道11固定安装在安装支架12的内部,接近开关62安装在安装支架12的内侧,指示开关65安装在安装支架12的外侧,plc设备63固定安装在安装支架12的内部下方。升降模拟组件2包括升降轨道21、滑块组件22和升降轴23。升降轨道21共有四条分两组安装在升降模拟组件2的内侧,滑块组件22位于两条升降轨道之间,滑块组件22与升降轨道21通过凹槽配合连接,升降轴23的两端穿过滑块组件22,升降轴23位于升降模拟组件2的内部。
25.如图2所示,滑动小车3包括小车框架31、移动轮组32、双肩控制电机33。
26.其中,移动轮组32对称安装在小车框架31的两侧,移动轮组32与三段式轨道11接触配合,双肩控制电机33安装在小车框架31的内侧,光栅传感器61安装在小车框架31的内侧。
27.如图3所示,升降台4包括升降台框架41、顶部安装板42、卷筒机构43、升降控制电机44、前导向轮组45、后导向轮组46。
28.其中,升降台框架41固定安装在升降模拟组件2的顶部,顶部安装板42通过螺栓组固定在升降台框架42的顶部。卷筒机构43和升降控制电机44安装在顶部安装板42的顶部,拉线传感器64与升降控制电机44关联。前导向轮组45安装在升降台框架41的顶部的内侧,后导向轮组46安装在升降台框架41的顶部的外侧。
29.如图4所示,载车架5包括载车架框架51,升降杆52和电磁铁53。载车架框架51位于升降模拟组件2的内部,升降杆52固定在载车架框架51的顶部前侧,电磁铁53安装在载车架框架51的顶部后侧。
30.本发明的工作原理如下:如图5所示,离机训练组件固定安装在训练场地,升降模拟组件位于离机训练组件的前侧,离机训练组件的前侧与升降模拟组件的后侧连接。滑动小车的起始位置在离机训练组件的内部,升降台安装在升降模拟组件的顶部,载车架位于升降模拟组件的内部,载车架的起始位置位于升降台的下方。工作过程中全部训练由离机训练组件、升降模拟组件、滑动小车、升降台和载车架执行机械部分,由多项感应控制组件执行控制及仿真模拟部分。训练前接通电源,红灯闪烁,指示控制柜正在上电。按下绿灯,plc上电执行找零位程序。零位找到后,电控柜白灯亮起,同时按键指示灯绿灯闪烁。上述流程完毕表示训练状态就绪,可以开始设置初始参数,包括伞型选择、跳伞是否出特情、风力风向、是否离机、下降脉冲数,脉冲频率(下降速度)等,根据实际训练需求可按需设置。滑动小车就位后,plc感应到滑动小车就位并显示可以训练指示。跳伞人员三步离机,通过光栅传感器,光栅传感器感应到人员通过,置离机状态完成。滑动小车滑沿安装在离机训练组件内部的三段式滑轨滑入载车架,安装在载车架上的接近开关感应到小车进入,plc接收信号将电磁铁锁定,滑动小车在载车架内锁定。plc发脉冲控制两台大功率电机牵引钢丝绳悬挂的载车架突降模拟离机失重,在下降一段时间后,电机突然停止,模拟人员开伞冲击。如果开伞正常,人员可通过连接拉线传感器的操纵绳控制伞的方向,plc采集操纵量反馈到上位机虚拟现实程序中模拟伞飞行方向改变。同时两台小功率电机根据操纵量和左右操纵绳提升人的左右肩,模拟翼伞飞行时,人体姿态左右倾斜;如果伞未开,人员可以拉拔穿戴设备上的门锁开关拔销,模拟打开备份伞或者飞伞,进行特情训练。着陆时,plc输出脉冲,两台大功率电机加速转动,模拟跳伞员下降着陆。训练完毕后,按黄色开关3秒,实现升降台升降到零位,解开电磁锁,小车可以拖动出载车架,plc复位,准备下一次训练。
31.应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。