1.本发明涉及一种用于焊接电机的、尤其是电动机的定子的条状导体的自由端部的焊机。本发明还涉及一种具有这样的焊机的制造系统。本发明还涉及一种用于焊接电机的、尤其是电动机的定子的条状导体的自由端部的方法。
背景技术:
2.电机(例如电动机)广泛地具有带有所谓的线圈绕组的定子。传统地,通过绕起导线来制造线圈绕组。然而,这样的缠绕方法在技术上是非常耗费的并且受到技术上的限制。另外,在缠绕的线圈中的填充度(导线在卷绕的横截面中的面积份额)被限制。
3.电机的线圈也可以替代性地通过彼此连接的条状导体来构造,所述条状导体插入到定子的基体中。尤其地,在电动地可驱动的(或者说电动地驱动的)机动车中,越来越多地使用具有带有条状导体的定子的电动机。为了彼此连接两个条状导体,将所述两个条状导体的自由端部彼此焊接。然而,在焊接条状导体的自由端部时,通常产生焊渣,所述焊渣会弄脏定子和焊接装置。
技术实现要素:
4.本发明的任务:
5.本发明的任务在于,给出一种焊机和一种焊接方法,所述焊机和方法允许对电机的定子的条状导体的自由端部的焊接,其中,所述定子被保护以免受污染。
6.对本发明的简短描述:
7.该任务通过一种用于焊接电机的、尤其是电动机的定子的条状导体的自由端部的焊机,所述焊机具有:
8.‑
载体结构,所述载体结构用于直接或非直接地固定定子,所述载体结构具有可打开且可关闭的焊接罩;
9.‑
焊接装置、尤其是激光焊接装置,
10.其中,所述焊接装置设置在载体结构上方,并且
11.所述载体结构能在焊接位置与装料位置之间切换,其中,焊接罩的第一侧在焊接位置中朝焊接装置定向,并且在装料位置中向下定向。
12.焊机是一种用于焊接定子的条状导体的自由端部的机器(设备)。定子可以直接地(非间接地)固定在载体结构上。替代性地,所述定子可以例如借助于与载体结构分开的保持件非直接地(间接地)固定在载体结构上。借助于所述保持件,可以将定子特别快速地固定在载体结构上和从载体结构脱开。
13.定子原则上能够固定在载体结构上,使得定子的基体(通常包括叠片组)设置在焊接罩的(背离第一侧的)第二侧上。基体然后——在观察第一侧时——被焊接罩盖住,从而所述基体被保护以免受焊渣影响。固定在载体结构上的定子的条状导体穿过焊接罩伸出。条状导体的要焊接的自由端部设置在焊接罩的第一侧上。
14.焊接罩可以打开和关闭。为了将定子设置在载体结构上或从载体结构移除,焊接罩原则上打开。在焊接自由端部时,焊接罩原则上关闭。
15.在焊接罩的关闭的状态中,在条状导体之间的中间空间至少在很大程度上封闭、优选完全封闭。因此,当焊接罩关闭时,可能出现的焊渣或其他污染物不会沉积在设置在焊接罩第一侧的另一侧(后方)的部件上,尤其是不会沉积在定子的基体上。
16.焊接罩通常具有径向外部的、基本上圆环形的盖元件,径向内部的、近似圆形的盖元件和可运动的中间元件。所述中间元件在关闭的状态中嵌入在条状导体之间。这样可以以相对简单的机械构件来覆盖在条状导体之间的中间空间以及径向地在条状导体外部的区域或径向地在条状导体内部的区域。
17.为了焊接自由端部,将载体结构带到焊接位置中。在焊接位置中,焊接罩的第一侧向下指向,并且条状导体的要焊接的自由端部向上指向。焊机的焊接装置设置在载体结构上方。焊机优选构造成激光焊接装置。通过激光焊接可以快速且精确地焊接所述自由端部。因为焊接装置位于自由端部的上方,所以焊渣沉积在焊接装置上的危险,例如沉积在激光焊接装置的透镜系统上的危险是小的。(关闭的)焊接罩同时防止焊渣或其他污染物穿透到定子的位于焊接罩下方的部件、尤其是定子的基体。
18.为了从载体结构移除定子,在焊接之后将载体结构切换到装料位置中。所述装料位置也可以称为装载位置。在装料位置中,第一侧和因此还有条状导体的(经焊接的)端部向下方指向。为了将定子从载体结构移除,打开焊接罩。因为第一侧(可能的焊渣和/或其他污染物可能已在焊接过程期间沉积在所述第一侧上)在打开时向下指向,所以避免污染物颗粒可能落到定子上。
19.条状导体可以构造为所谓的发簪状构件(发夹状构件),在所述发簪状构件中,基本上直线的两个区段通过一个弯曲的区段连接。在所述直线的区段的每个区段上然后构造要焊接的自由端部。直线的区段装入到定子的基体中。替代性地,条状导体的自由端部能够在基体的两侧彼此焊接。
20.条状导体可以具有矩形的横截面。利用这样的条状导体能够实现定子的特别高的填充度。换句话说,所述条状导体允许将尽可能多的导体材料(通常是铜)引入到定子的基体的空隙中。条状导体通常设置为多个同心的环(层)。
21.所述焊机尤其是适合于制造用于机动车的驱动马达的定子。
22.所述焊机优选地用在下面描述的根据本发明的焊接方法的范围中。尤其地,所述焊机可以设置成用于执行下面描述的根据本发明的方法。
23.本发明的优选实施方式:
24.在一种优选的实施方式中规定,所述焊接罩设置成用于,在关闭的状态中夹住条状导体的自由端部。由此固定所述自由端部,从而所述自由端部在焊接时不会运动。然后可以特别精确地焊接所述自由端部。
25.在一种特别优选的实施方式中规定,所述焊接罩具有用于嵌入在所述条状导体之间的可移动的指状部。为了关闭焊接罩,所述可移动的指状部可以通常沿径向方向推入在条状导体之间。为了打开焊接罩,所述指状部通常又沿径向方向拉回。借助于所述指状部可以以清楚的机械耗费来设置对在条状导体之间的中间空间的所要求的覆盖。此外,所述指状部还可以构造成用于夹住所述条状导体。
26.焊机的一种同样特别优选的实施方式的特征在于,所述焊机还具有用于清洁焊接罩,尤其是用于清洁焊接罩的第一侧的清洁装置。借助于所述清洁装置能从焊接罩并且优选地也从条状导体的经焊接的端部移除可能的焊渣和/或其他污染物。通过清洁焊接罩能够进一步降低定子被污染的危险。另外,可以通过清洁焊接罩来避免:污染物颗粒到达焊接罩的可运动的部件之间并且避免其在那里卡住。
27.优选地,所述清洁装置设置在载体结构下方。在清洁时,脱开的污染物颗粒(例如以脱开的焊渣的形式)于是向下从焊接罩落下离开。
28.可以规定,所述清洁装置被设置成用于通过吹、刮、刷和/或喷丸、尤其是co2喷雪来进行的清洁。已表明的是,利用这样的清洁方法能够实现快速且彻底地清洁焊接罩并且在必要情况下也清洁条状导体的自由端部。
29.可以规定,所述焊机具有框架、尤其是矩形的框架,载体结构经由枢转桥支承在所述框架上。所述枢转桥能够实现以简单的方式将载体结构在焊接位置与装料位置之间枢转。此外,焊接装置可以固定在所述框架上。由此促进机器的紧凑的构造。另外,可以通过共同的框架来改善载体结构和焊接装置彼此之间的精确的定向。
30.所述焊机的一种有利的实施方式的特征在于,所述载体结构能够围绕水平的枢转轴线旋转。通过枢转轴线的水平的布置结构,仅需要少的结构空间来用于将载体结构在焊接位置与装料位置之间切换。此外,在将载体结构围绕水平的枢转轴线枢转时确保,可能存在的污染物颗粒在窄地限定的区域中从焊接罩落下。
31.焊机通常允许在焊接装置与载体结构之间的沿至少一个水平方向、优选两个水平方向和通常还有沿竖直方向的相对运动。为此,焊接装置和/或载体结构可以是可运动的。
32.在具有用于载体结构的水平的枢转轴线的焊机中,还可以规定,载体结构能围绕垂直于枢转轴线定向的旋转轴线旋转。通过围绕旋转轴线的旋转可以以简单的方式将条状导体的要焊接的自由端部的各个对相对于用于焊接过程的焊接装置定向。所述焊接装置在此首先以合适的径向位置相对于定子定位。然后,为了进行焊接,通过围绕旋转轴线来旋转载体结构将条状导体的自由端部的对设置在焊接装置下方。在围绕枢转轴线枢转载体结构时,所述旋转轴线可以一起旋转。通常,载体结构可旋转地支承在所述枢转桥内。
33.焊机的一种有利的实施方式的特征在于,所述焊接装置能沿着一个竖直方向和至少一个水平方向、优选两个水平方向相对于载体结构移动。由此能够以简单的方式合适地定位焊接装置以用于焊接自由端部。所述载体结构通常沿竖直方向固定在焊机的框架上。另外,所述载体结构大多能沿水平方向相对于框架运动。为了设置焊接装置相对于载体结构的可移动性,焊接装置于是对应地能沿所述竖直方向和/或所述至少一个水平方向移动。
34.根据本发明的制造系统:
35.落入在本发明的范围中的还有一种制造系统,所述制造系统具有上面描述的、根据本发明的焊机并且具有保持件、尤其是夹持器,借助于所述保持件,定子能固定在载体结构上。借助于所述保持件,保持件可以特别快速地固定在载体结构上和从载体结构脱开。为了固定在载体结构上,定子通常在保持在保持件中的状态中被提供。所述保持件可以连同定子固定在载体结构上和从所述载体结构移除。另外,所述保持件可以在其余的制造过程中简化对定子的操纵。
36.优选地规定,所述保持件能经由定心的夹紧系统、尤其是零点夹紧系统与载体结
构连接。以这样的方式能够特别精确地将定子固定在载体结构上。
37.根据本发明的焊接方法:
38.同样,落入到本发明的范围中的是一种用于借助于具有带有可打开且可关闭的焊接罩的焊机来焊接电机的、尤其是电动机的定子的条状导体的自由端部的方法。所述焊机优选是上面描述的根据本发明的焊机。所述方法包括如下步骤:
39.a)提供固定在载体结构上的定子,其中,焊接罩的第一侧和条状导体的自由端部向上指向,并且所述焊接罩关闭;
40.b)焊接自由端部;
41.c)翻转载体结构,从而所述第一侧和条状导体的端部向下指向;
42.d)打开焊接罩,并且从载体结构移除定子。
43.通过步骤a)实现定子和焊接罩位于适合于焊接的配置中。尤其地,载体结构的定向对应于上面提到的焊接位置,其中,焊接装置设置在载体结构上方或者说定子上方。为了将定子固定在载体结构上,可以有利地使用上面描述的、根据本发明的制造系统的保持件。直接接着步骤a)可以在步骤b)中进行对自由端部的焊接。在此,关闭的焊接罩防止焊渣或其他污染物沉积在定子上。
44.在焊接所述自由端部之后,在步骤c)中翻转载体结构。载体结构的由此实现的定向可以尤其是对应于上面描述的装料位置。在打开焊接罩时,其中,第一侧向下指向,并且条状导体的端部向下指向,没有污染物颗粒会落到定子上。此外,如果在将定子从载体结构移除时,污染物颗粒应从焊接罩或从条状导体的端部脱开,则这些污染物颗粒不落到定子上,而是向下离开定子。定子在步骤d)中通常向上从载体结构移除。
45.具有所述定子的电机可以是用于驱动机动车的、尤其是(中度)混合动力的机动车的驱动马达。所述电机可以尤其是起动机
‑
发电机。所述电机例如可以具有最低10kw和最高15kw(例如12kw)的额定功率。
46.优选地,所述步骤a)包括如下子步骤:
47.a1)将定子固定在载体结构上,其中,焊接罩的第一侧和条状导体的自由端部向下指向;
48.a2)关闭焊接罩;
49.a3)翻转载体结构,从而所述第一侧和条状导体的自由端部向上指向。
50.通过定子在焊接罩的向下指向的第一侧的情况下固定在载体结构上来确保,在条状导体的自由端部引导穿过焊接罩时,可能的保留在焊接罩上的污染物颗粒没有落到定子上。另外,载体结构在移除第一定子和固定第二定子之间可以保留在装料位置中。由此可以加速多个定子的制造。
51.通过步骤a2)和a3)设置焊接罩和载体结构的适合于焊接自由端部的配置。
52.通常,子步骤a1)至a3)以给出的顺序来进行。子步骤a2)替代性地也可以在时间上与子步骤a1)和/或子步骤a3)重叠地进行。子步骤a2)还可以至少部分地、尤其是完全地在子步骤a3)之后进行。
53.所述方法可以具有如下另外的步骤:
54.e)在载体结构的在步骤c)中设置的、其中所述第一侧向下指向的位置中,清洁焊接罩的第一侧,并且优选地也清洁条状导体的端部。换句话说,为了执行清洁,载体结构保
留在在步骤c)中设置的(装料)位置中。由此引起,在清洁时,脱开的污染物颗粒可以从焊接罩和条状导体的端部离开而向下落下。所述清洁优选地通过吹、刮、刷和/或喷丸、尤其是co2喷雪来进行。
55.在仅清洁焊接罩的第一侧时,步骤e)可以在步骤d)之前或优选地在步骤d)之后进行。如果也清洁条状导体的端部,步骤e)在步骤d)之前进行。
56.本发明其他的优点从说明书和附图中得出。根据本发明,上面提及的特征和还要进一步说明的特征相应地本身单独地使用或成多个地以任意的组合使用。所示出的和说明的实施方式不可理解为最后的列举,而是更多地具有用于描述本发明的示例性的特征。
附图说明
57.本法发明的附图的详细的说明:
58.在附图中示出本发明并且根据实施例更详细地阐述本发明。在附图中:
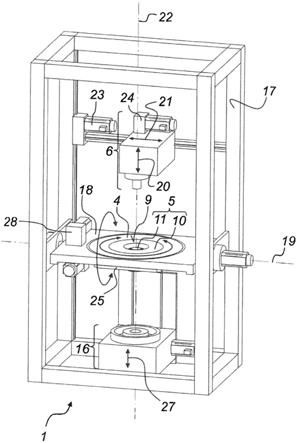
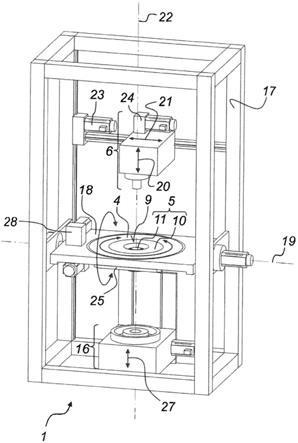
59.图1以示意性的透视图示出具有用于接纳定子的载体结构的焊机,所述载体结构能经由枢转桥在焊接位置和装料位置之间枢转,并且所述载体结构具有用于覆盖定子的可打开且可关闭的焊接罩,其中,所述载体结构位于焊接位置中;
60.图2a以免除的、示意性的透视图示出图1的焊机的具有载体结构的枢转桥;
61.图2b以示意性的俯视图示出图1的焊机的载体结构的在打开状态中的焊接罩;
62.图2c以示意性的俯视图示出图2b的在关闭状态中的焊接罩;
63.图2d以示意性的透视图示出具有条状导体的定子,所述条状导体的自由端部能够借助于图1的焊机来焊接;
64.图3示出通过图1的焊机的载体结构的示意性的横截面,其中,定子经由保持件固定在载体结构上;
65.图4a以示意性的透视图示出具有如在图1中的焊机并且具有保持件的制造系统,具有条状导体的定子接纳在所述保持件中,其中,用于保持件的载体结构位于装料位置中,从而保持件连同定子能够从上方固定在载体结构上;
66.图4b以示意性的透视图示出图4a的制造系统连同借助于保持件固定在载体结构上的定子,其中,所述载体结构位于装料位置中;
67.图4c以示意性的透视图示出在将载体结构切换到焊接位置中期间的图4a的制造系统;
68.图4d以示意性的透视图示出具有位于焊接位置中的载体结构的图4a的制造系统;
69.图4e以示意性的透视图示出在焊接定子的条状导体的自由端部期间的图4a的制造系统;
70.图4f以示意性的透视图示出在将载体结构从焊接位置切换到装料位置中期间的图4a的制造系统;
71.图4g以示意性的透视图示出具有位于装料位置中的载体结构的图4a的制造系统,其中,用于清洁焊接罩的清洁设备朝该焊接罩移动;
72.图4h以示意性的透视图示出在将定子从载体结构移除期间的图4a的制造系统,所述载体结构位于装料位置中;
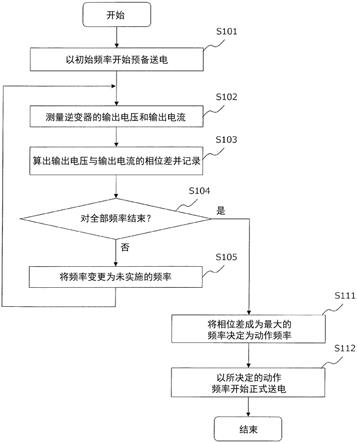
73.图5示出用于焊接条状导体的自由端部的方法的流程图。
具体实施方式
74.图1示出焊机1。所述焊机1用于焊接定子3(参见图2d)的条状导体2的自由端部2a。焊机1具有载体结构4。在所述载体结构4上能固定定子3。载体结构4具有可打开且可关闭的焊接罩5。
75.焊机1还具有焊接装置6、在这里为激光焊接装置。所述焊接装置6设置在载体结构5上方。
76.焊机1在这里具有框架17。所述框架17在从前方的观察方向的情况下构造成矩形的。焊接装置6相对于框架17能沿竖直方向20和水平方向21移动。为此,设有用于沿竖直方向21的移动的竖直驱动器23并且设有用于沿水平方向21的移动的水平驱动器24。
77.载体结构4经由枢转桥18支承在框架17上。所述枢转桥18连同载体结构4能围绕水平地伸展的枢转轴线19相对于框架17旋转。为了围绕枢转轴线19枢转枢转桥18,设有未更详细地示出的枢转驱动器。具有焊接罩5的载体结构4通过围绕水平的枢转轴线19的旋转能切换到焊接位置和切换到装料位置中。在图1中示出焊接位置。在所述焊接位置中,焊接罩5的第一侧9朝焊接装置6指向、即向上指向。与此相对地,焊接罩5的第一侧9在装料位置中向下指向(未在图1中示出)。为了将载体结构4在焊接位置和装料位置之间切换,将载体结构4围绕枢转轴线19旋转180
°
。
78.在这里,载体结构4还能够围绕垂直于所述枢转轴线19定向的旋转轴线22相对于枢转桥18旋转。在示出的焊接位置中,所述旋转轴线22竖直地伸展。
79.在这里,焊机1还具有清洁装置16。所述清洁装置16用于清洁焊接罩5的第一侧9和条状导体2的端部2a。为了进行清洁,将载体结构4切换到装料位置中。在这里,清洁装置16设置成用于通过co2喷雪的清洁。所述清洁装置16设置在载体结构4下方。为了使用于清洁的清洁装置16能够靠近焊接罩5,清洁装置16能沿竖直方向27朝载体结构4移动。为了在焊接位置与装料位置之间枢转具有载体结构4的枢转桥18,清洁装置16——如在图1中示出的那样——向下从载体结构4移动离开。
80.图2示出具有载体结构4的枢转桥18。为了围绕旋转轴线22旋转载体结构4,设有旋转驱动器28。
81.焊接罩5包括径向外部的、圆环形的盖元件10和径向内部的圆形的盖元件11。所述焊接罩5还具有可运行的以指状部12的形式的中间元件(在图2a中不可见,但参见图2b和2c)。为了打开和关闭焊接罩5,所述指状部12沿径向方向径向向外拉回或径向向内缩进。
82.在图2b中示出在打开状态中的焊接罩5。指状部12径向向外拉回。在这里,指状部12稍微径向向内在径向外部的盖元件10下方伸出。在焊接罩5下方(在这里在图平面下方)设有具有条状导体2的定子3(参见图2d)。所述条状导体2延伸穿过在径向内部的盖元件11与径向外部的盖元件10之间的中间空间。条状导体2的要焊接的、自由端部2a位于焊接罩5的第一侧9上(在这里在图平面上方)。在焊接罩5的打开的状态中,定子3固定在具有焊接罩5的载体结构4上或从该载体结构移除。
83.在这里,条状导体2设置成四个同心的环。注意的是,相对于在图2d中示出的配置,条状导体2在焊接前交替弯曲,使得要焊接的两个条状导体2的自由端部2a相应地彼此靠近(未更详细地示出)。
84.图2c示出在关闭状态中的焊接罩5。指状部12径向向内缩进。条状导体2被夹住在
各指状部12之间。指状部12分别覆盖条状导体2的自由端部2a的在相邻的径向伸展的排之间的区域。在焊接罩5的关闭的状态中,可以焊接条状导体2的自由端部2a。在此时,通过盖元件10和11以及向内缩进的指状件12防止焊渣或其他污染物到达定子3上、尤其是到达定子的基体13(参见图2d)上。
85.图3示出通过具有焊接罩5的载体结构4的横截面。定子3借助于保持件25非直接地固定在载体结构4上。所述保持件25在这里构造为夹持器,所述夹持器将定子3的基体13沿径向方向夹紧。保持件25经由定心的夹紧系统26(在这里以零点夹紧系统的形式)固定在载体结构4上。通过所述定心的夹紧系统26,保持件25连同定子3能够快速且精确地固定在载体结构4上。
86.在图3中,焊接罩5处于关闭的状态中。指状件12在条状导体2之间伸过并且在下方接合径向内部的盖元件11。为了进行焊接,可从第一侧9接近条状导体2的自由端部2a。
87.定子3的基体13在焊接罩5下方设置在焊接罩5的第二侧14上。所述第二侧14与所述第一侧9相对置地构造在焊接罩5上。所述第一侧和第二侧9、14沿相反的方向指向。
88.保持件25也位于焊接罩5的第二侧14上。因此,在焊接自由端部2a时,保持件25也被保护以免受污染、例如通过焊渣引起的污染。
89.图4a
‑
4h示出具有焊机1(参见图1)和保持件25(参见图3)的制造系统30,在所述保持件上保持有定子(参见图2d),在执行焊接方法期间的不同的时间点,在图5中示意性地示出所述焊接方法的流程。
90.在图4a中,载体结构4位于装料位置中,其中,第一侧9向下(朝清洁装置16)指向。在载体结构4位于装料位置中期间,在步骤101中,保持件25连同定子3借助于定心的夹紧系统26固定在载体结构4上。条状导体2(参见图2d)的自由端部2a在此同样向下指向。保持件25设置在焊接罩5的第二侧14上。在将定子3固定在载体结构4上时,焊接罩5被打开。
91.在图4b中示出制造系统30连同间接经由保持件25固定在载体结构4上的定子3。现在,可以在步骤102中关闭焊接罩5。载体结构4在此始终位于装料位置中。
92.然后,在步骤103中翻转载体结构4。为此,枢转桥18围绕水平的枢转轴线19旋转。这在图4c中示出。在步骤103结束之后,如在图4d中示出的那样,载体结构4位于焊接位置中。载体结构4的第一侧9和条状导体2的自由端部2a现在向上朝焊接装置6指向。
93.步骤101、102、103作为总步骤100共同导致将定子3固定在载体结构4上地提供,其中,条状导体2的自由端部2a和载体结构4的第一侧9向上指向,并且焊接罩5关闭。
94.然后,在步骤104中进行对条状导体2的自由端部2a的焊接。这在图4e中通过高度抽象地示出的激光束31示意示出,所述激光束从构造为激光焊接装置的焊接装置6发射。激光束31在实际中大多聚焦在要焊接的自由端部上。注意的是,通常分别成对地依次焊接各自由端部2a;为此,载体结构4围绕竖直的旋转轴线旋转(未更详细地示出,参见图1和图2a)。在此期间,载体结构4连同固定在该载体结构上的定子保留在焊接位置中。
95.在焊接结束之后,在步骤105中,再次翻转载体结构4,以便将该载体结构转移到装料位置中。为此,参见图4f,枢转桥18围绕水平的枢转轴线19旋转。
96.当载体结构4位于装料位置中时,即当第一侧9和条状导体2的经焊接的端部2a向下指向时,则在步骤106中执行清洁过程。为此,参见图4g,清洁设备16从下方向焊接罩5移动。所述清洁设备16将污染物、如焊渣从焊接罩5的第一侧9(在图4g中被盖住)和条状导体2
的现在经焊接的自由端部2a(在图4g中同样被盖住)移除。在清洁时,脱开的污染物颗粒在重力影响下向下落下,从而可以将污染物颗粒收集在清洁装置16中。
97.在清洁过程结束之后,在步骤107中,焊接罩5打开。接着,在步骤108中,参见图4h,保持件25连同定子3从载体结构4移除,方式为:从载体结构4向上取出保持件25。
98.以上面描述的方式,可以然后焊接另外的定子的条状导体的自由端部。为了固定另外的定子,载体结构4可以保留在最后设置的装料位置中。通常,在固定另外的定子之前,再次从枢转桥18向下移除清洁装置16。
99.附图标记列表
[0100]1ꢀꢀꢀꢀꢀꢀꢀꢀ
焊机
[0101]
2a
ꢀꢀꢀꢀꢀꢀꢀ
自由端部
[0102]2ꢀꢀꢀꢀꢀꢀꢀꢀ
条状导体
[0103]3ꢀꢀꢀꢀꢀꢀꢀꢀ
定子
[0104]4ꢀꢀꢀꢀꢀꢀꢀꢀ
载体结构
[0105]5ꢀꢀꢀꢀꢀꢀꢀꢀ
焊接罩
[0106]6ꢀꢀꢀꢀꢀꢀꢀꢀ
焊接装置
[0107]9ꢀꢀꢀꢀꢀꢀꢀꢀ
第一侧
[0108]
10
ꢀꢀꢀꢀꢀꢀꢀ
径向外部的盖元件
[0109]
11
ꢀꢀꢀꢀꢀꢀꢀ
径向内部的盖元件
[0110]
12
ꢀꢀꢀꢀꢀꢀꢀ
指状部
[0111]
13
ꢀꢀꢀꢀꢀꢀꢀ
基体
[0112]
14
ꢀꢀꢀꢀꢀꢀꢀ
第二侧
[0113]
16
ꢀꢀꢀꢀꢀꢀꢀ
清洁装置
[0114]
17
ꢀꢀꢀꢀꢀꢀꢀ
框架
[0115]
18
ꢀꢀꢀꢀꢀꢀꢀ
枢转桥
[0116]
19
ꢀꢀꢀꢀꢀꢀꢀ
枢转轴线
[0117]
20
ꢀꢀꢀꢀꢀꢀꢀ
竖直方向
[0118]
21
ꢀꢀꢀꢀꢀꢀꢀ
水平方向
[0119]
22
ꢀꢀꢀꢀꢀꢀꢀ
旋转轴线
[0120]
23
ꢀꢀꢀꢀꢀꢀꢀ
竖直驱动器
[0121]
24
ꢀꢀꢀꢀꢀꢀꢀ
水平驱动器
[0122]
25
ꢀꢀꢀꢀꢀꢀꢀ
保持件
[0123]
26
ꢀꢀꢀꢀꢀꢀꢀ
定心的夹紧系统
[0124]
27
ꢀꢀꢀꢀꢀꢀꢀ
竖直方向
[0125]
28
ꢀꢀꢀꢀꢀꢀꢀ
旋转驱动器
[0126]
30
ꢀꢀꢀꢀꢀꢀꢀ
制造系统
[0127]
31
ꢀꢀꢀꢀꢀꢀꢀ
激光束
[0128]
100
ꢀꢀꢀꢀꢀꢀ
提供
[0129]
101
ꢀꢀꢀꢀꢀꢀ
将定子3固定在载体结构4上
[0130]
102
ꢀꢀꢀꢀꢀꢀ
关闭焊接罩5
[0131]
103
ꢀꢀꢀꢀꢀꢀ
翻转载体结构4(装料位置
‑
>焊接位置)
[0132]
104
ꢀꢀꢀꢀꢀꢀ
焊接自由端部2a
[0133]
105
ꢀꢀꢀꢀꢀꢀ
翻转载体结构4(焊接位置
‑
>装料位置)
[0134]
106
ꢀꢀꢀꢀꢀꢀ
清洁
[0135]
107
ꢀꢀꢀꢀꢀꢀ
打开焊接罩5
[0136]
108
ꢀꢀꢀꢀꢀꢀ
从载体结构4移除定子3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。