技术特征:
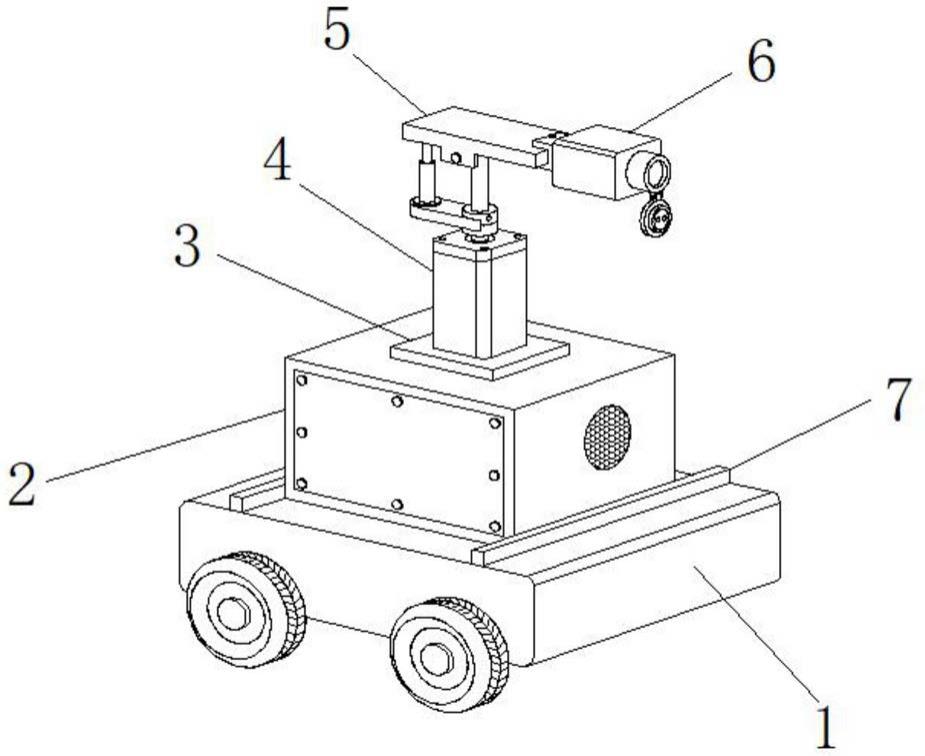
1.一种人工智能红外图像处理装置,包括远程遥控小车(1),其特征在于:所述远程遥控小车(1)的上表面两端均固定连接有限位条(7),且远程遥控小车(1)的上表面位于两个限位条(7)之间设置有智控箱(2),所述智控箱(2)的上表面中部设置有第一安装座(3),所述第一安装座(3)的上端安装有伺服电机(4),所述伺服电机(4)的输出端连接有调节机构(5),所述调节机构(5)的一端连接有红外机构(6)。其中,所述智控箱(2)包括有箱体(201)、防尘网(202)、plc控制器(203)、线路板(204)、远程控制模块(205)、蓄电池(206)、处理模块(207)以及储存模块(208),所述箱体(201)位于远程遥控小车(1)的上表面中部,所述防尘网(202)位于箱体(201)的一侧壁,所述plc控制器(203)、线路板(204)、远程控制模块(205)、蓄电池(206)、处理模块(207)以及储存模块(208)均位于箱体(201)的内部,所述plc控制器(203)位于远程遥控小车(1)的内部靠近防尘网(202)一侧位置处,所述线路板(204)位于plc控制器(203)的一侧,所述远程控制模块(205)位于线路板(204)的一侧,所述蓄电池(206)位于远程控制模块(205)的一侧,所述处理模块(207)安装于箱体(201)的内壁靠近远程控制模块(205)上方位置处,所述储存模块(208)位于处理模块(207)的一侧。2.根据权利要求1所述的一种人工智能红外图像处理装置,其特征在于:所述调节机构(5)包括有调节板(501)、联轴器(502)、轴杆(503)、第一连接块(504)、电动伸缩杆(505)、螺纹孔(506)、第一固定块(507)、第二固定块(508)、第二小孔(509)、第一小孔(510)、第二安装座(511)、第一横杆(512)和第二横杆(513),所述联轴器(502)连接于伺服电机(4)的输出端,所述轴杆(503)连接于联轴器(502)的上端,所述第一连接块(504)位于联轴器(502)的外壁一端,所述第二安装座(511)位于第一连接块(504)的一端,所述电动伸缩杆(505)安装于第二安装座(511)的上端,所述第一横杆(512)位于电动伸缩杆(505)的上端,所述第二横杆(513)位于轴杆(503)的上端,所述调节板(501)位于轴杆(503)的正上方,所述螺纹孔(506)贯穿于调节板(501)的一端,所述第二固定块(508)固定连接于调节板(501)的下表面另一端,所述第二小孔(509)贯穿于第二固定块(508)的上端外壁,两个所述第一固定块(507)对称分布于调节板(501)的下表面两端,所述第一小孔(510)位于第一固定块(507)中部。3.根据权利要求1所述的一种人工智能红外图像处理装置,其特征在于:所述红外机构(6)包括有红外探测仪(601)、探头(602)、扣盖(603)、摄像头(604)、照明灯(605)、第二连接块(606)和连接座(607),所述连接座(607)位于调节机构(5)的一端,所述红外探测仪(601)固定连接于连接座(607)的一端,所述探头(602)位于红外探测仪(601)的前表面中部,所述第二连接块(606)位于探头(602)的下端,所述扣盖(603)转动连接于第二连接块(606)的下端,所述摄像头(604)安装于扣盖(603)的内侧一端,所述照明灯(605)安装于扣盖(603)的内侧另一端。4.根据权利要求1所述的一种人工智能红外图像处理装置,其特征在于:所述限位条(7)与远程遥控小车(1)通过焊接固定连接,所述限位条(7)与智控箱(2)通过螺钉固定连接。5.根据权利要求2所述的一种人工智能红外图像处理装置,其特征在于:所述第一连接块(504)与联轴器(502)通过焊接固定连接,所述伺服电机(4)的输出端与轴杆(503)的下端通过联轴器(502)固定连接,所述第一连接块(504)与第二安装座(511)通过螺钉固定连接,
所述轴杆(503)与第一小孔(510)通过第二横杆(513)和第一小孔(510)配合转动连接,所述第二固定块(508)与电动伸缩杆(505)通过第一横杆(512)和第二小孔(509)配合转动连接。6.根据权利要求2所述的一种人工智能红外图像处理装置,其特征在于:所述第一横杆(512)贯穿于电动伸缩杆(505)的伸缩端,所述第二横杆(513)贯穿于轴杆(503)的上端。7.根据权利要求1所述的一种人工智能红外图像处理装置,其特征在于:所述连接座(607)的一端开设有螺孔,所述螺孔与调节板(501)一端的螺纹孔(506)相匹配,所述调节板(501)与连接座(607)通过螺栓固定连接,所述连接座(607)与红外探测仪(601)通过焊接固定连接。8.根据权利要求3所述的一种人工智能红外图像处理装置,其特征在于:所述扣盖(603)与探头(602)的外径大小相同,所述第二连接块(606)与扣盖(603)的连接处设置有转杆,且第二连接块(606)与扣盖(603)通过转杆转动连接。
技术总结
本发明公开了一种人工智能红外图像处理装置,涉及红外设备领域,包括远程遥控小车,所述远程遥控小车的上表面两端均固定连接有限位条,且远程遥控小车的上表面位于两个限位条之间设置有智控箱,所述智控箱的上表面中部设置有第一安装座,所述第一安装座的上端安装有伺服电机。本发明通过远程遥控小车带动红外设备进行移动,可对污染区、狭窄区和危险区域等地方进行检查,进而解决了人工检测的不便性;通过调节机构对红外机构进行旋转调节和上下角度调节,可对不同位置区域进行无死角检测,极大的扩展了红外扫描的范围;通过在扣盖内增设摄像头和照明灯,可便于远程操作人员勘察地形,有利于远程遥控小车的移动,避免发生碰撞等事故。等事故。
技术研发人员:黄忠 范恒帅 董甲东 黄昌文 宋加兵 刘娟 王远志
受保护的技术使用者:黄忠
技术研发日:2020.12.19
技术公布日:2021/11/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。